Empir3D : A Framework for Multi-Dimensional Point Cloud Assessment

0
🏋️
Sign in to get full access
Overview
- Advancements in sensors, algorithms, and hardware have made real-time 3D perception feasible.
- Current methods for evaluating 3D model quality have limitations, such as inability to capture coverage, local variations in density and error, and sensitivity to outliers.
- The paper proposes a new evaluation framework called Empir3D that consists of four metrics: resolution, accuracy, coverage, and artifact score.
- Empir3D provides a more comprehensive assessment of point cloud quality compared to existing uni-dimensional measures.
Plain English Explanation
The paper introduces a new way to evaluate the quality of 3D models, which are digital representations of real-world objects or environments. Advancements in sensors, algorithms, and hardware have made it possible to create 3D models in real-time, but existing methods for comparing and assessing these models have limitations.
Current methods, such as Chamfer, Hausdorff, and Earth-Mover's distance, are one-dimensional and can't fully capture important aspects of 3D model quality. For example, they may not be able to measure how well the model covers the entire object or environment, or how consistent the density of the model is in different areas.
To address these shortcomings, the researchers propose a new evaluation framework called Empir3D. This framework consists of four metrics:
- Resolution: Measures the ability to distinguish between individual parts in the 3D model.
- Accuracy: Measures the registration error, or how well the model aligns with the real-world object or environment.
- Coverage: Evaluates the portion of the object or environment that is missing from the model.
- Artifact Score: Characterizes the presence of any artifacts or distortions in the model.
By using these four metrics, Empir3D provides a more comprehensive and nuanced assessment of 3D model quality compared to existing uni-dimensional measures. The authors demonstrate the benefits of this approach by applying Empir3D to evaluate two common 3D perception applications: SLAM (Simultaneous Localization and Mapping) and point cloud completion.
Technical Explanation
The paper proposes a new evaluation framework for 3D point clouds, called Empir3D, that consists of four complementary metrics:
-
Resolution: This metric quantifies the ability to distinguish between individual parts in the point cloud. It measures the smallest distance between neighboring points, capturing the level of detail in the model.
-
Accuracy: This metric measures the registration error, or how well the point cloud aligns with the real-world object or environment. It computes the distance between corresponding points in the model and the ground truth.
-
Coverage: This metric evaluates the portion of the object or environment that is missing from the point cloud. It measures the percentage of the ground truth that is not represented in the model.
-
Artifact Score: This metric characterizes the presence of any artifacts or distortions in the point cloud, such as outliers or uneven point distributions.
Through detailed analysis, the authors demonstrate that these four metrics provide a more comprehensive assessment of point cloud quality compared to existing uni-dimensional measures like Chamfer, Hausdorff, and Earth-Mover's distance. They apply Empir3D to evaluate two 3D perception applications: SLAM and point cloud completion, and show that the new framework offers insights that are not captured by the traditional metrics.
The authors also provide an implementation of Empir3D, custom real-world datasets, and evaluations of learning-based methods, along with detailed documentation on how to integrate the pipeline. This will be made available upon publication of the paper.
Critical Analysis
The paper presents a well-designed and thorough evaluation framework for 3D point clouds, addressing limitations of existing uni-dimensional metrics. The authors have carefully considered the key dimensions of point cloud quality and developed complementary metrics to assess them.
One potential limitation of the Empir3D framework is that it may require additional ground truth data or manual annotations to compute some of the metrics, such as the artifact score. This could make the framework more challenging to apply in certain real-world scenarios where high-quality ground truth data is not available.
Additionally, the paper does not provide an in-depth discussion of the trade-offs or potential pitfalls of the individual metrics. For example, it would be helpful to understand the sensitivity of the resolution and accuracy metrics to factors like sensor noise or occlusions, and how these might affect the overall assessment of point cloud quality.
Further research could also explore the applicability of Empir3D to other 3D perception tasks beyond SLAM and point cloud completion, as well as the integration of the framework with existing 3D modeling and evaluation pipelines.
Conclusion
The Empir3D framework proposed in this paper represents an important advancement in the evaluation of 3D point clouds. By introducing a multi-dimensional assessment that considers resolution, accuracy, coverage, and artifact score, the authors have developed a more comprehensive approach to reasoning about the quality of 3D models.
This work has the potential to significantly improve the development and debugging of 3D perception applications, as well as enable more meaningful comparisons between different algorithms and sensors. As the field of 3D computer vision continues to evolve, tools like Empir3D will become increasingly valuable for ensuring the reliability and performance of these systems in real-world scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏋️
0
Empir3D : A Framework for Multi-Dimensional Point Cloud Assessment
Yash Turkar, Pranay Meshram, Christo Aluckal, Charuvahan Adhivarahan, Karthik Dantu
Advancements in sensors, algorithms, and compute hardware have made 3D perception feasible in real time. Current methods to compare and evaluate the quality of a 3D model, such as Chamfer, Hausdorff, and Earth-Mover's distance, are uni-dimensional and have limitations, including an inability to capture coverage, local variations in density and error, and sensitivity to outliers. In this paper, we propose an evaluation framework for point clouds (Empir3D) that consists of four metrics: resolution to quantify the ability to distinguish between individual parts in the point cloud, accuracy to measure registration error, coverage to evaluate the portion of missing data, and artifact score to characterize the presence of artifacts. Through detailed analysis, we demonstrate the complementary nature of each of these dimensions and the improvements they provide compared to the aforementioned uni-dimensional measures. Furthermore, we illustrate the utility of Empir3D by comparing our metrics with uni-dimensional metrics for two 3D perception applications (SLAM and point cloud completion). We believe that Empir3D advances our ability to reason about point clouds and helps better debug 3D perception applications by providing a richer evaluation of their performance. Our implementation of Empir3D, custom real-world datasets, evaluations on learning methods, and detailed documentation on how to integrate the pipeline will be made available upon publication.
Read more9/20/2024

0
Perception-Guided Quality Metric of 3D Point Clouds Using Hybrid Strategy
Yujie Zhang, Qi Yang, Yiling Xu, Shan Liu
Full-reference point cloud quality assessment (FR-PCQA) aims to infer the quality of distorted point clouds with available references. Most of the existing FR-PCQA metrics ignore the fact that the human visual system (HVS) dynamically tackles visual information according to different distortion levels (i.e., distortion detection for high-quality samples and appearance perception for low-quality samples) and measure point cloud quality using unified features. To bridge the gap, in this paper, we propose a perception-guided hybrid metric (PHM) that adaptively leverages two visual strategies with respect to distortion degree to predict point cloud quality: to measure visible difference in high-quality samples, PHM takes into account the masking effect and employs texture complexity as an effective compensatory factor for absolute difference; on the other hand, PHM leverages spectral graph theory to evaluate appearance degradation in low-quality samples. Variations in geometric signals on graphs and changes in the spectral graph wavelet coefficients are utilized to characterize geometry and texture appearance degradation, respectively. Finally, the results obtained from the two components are combined in a non-linear method to produce an overall quality score of the tested point cloud. The results of the experiment on five independent databases show that PHM achieves state-of-the-art (SOTA) performance and offers significant performance improvement in multiple distortion environments. The code is publicly available at https://github.com/zhangyujie-1998/PHM.
Read more7/8/2024
🧠
0
PointPCA: Point Cloud Objective Quality Assessment Using PCA-Based Descriptors
Evangelos Alexiou, Xuemei Zhou, Irene Viola, Pablo Cesar
Point clouds denote a prominent solution for the representation of 3D photo-realistic content in immersive applications. Similarly to other imaging modalities, quality predictions for point cloud contents are vital for a wide range of applications, enabling trade-off optimizations between data quality and data size in every processing step from acquisition to rendering. In this work, we focus on use cases that consider human end-users consuming point cloud contents and, hence, we concentrate on visual quality metrics. In particular, we propose a set of perceptually relevant descriptors based on Principal Component Analysis (PCA) decomposition, which is applied to both geometry and texture data for full-reference point cloud quality assessment. Statistical features are derived from these descriptors to characterize local shape and appearance properties for both a reference and a distorted point cloud. The extracted statistical features are subsequently compared to provide corresponding predictions of visual quality for the distorted point cloud. As part of our method, a learning-based approach is proposed to fuse these individual predictors to a unified perceptual score. We validate the accuracy of the individual predictors, as well as the unified quality scores obtained after regression against subjectively annotated datasets, showing that our metric outperforms state-of-the-art solutions. Insights regarding design decisions are provided through exploratory studies, evaluating the performance of our metric under different parameter configurations, attribute domains, color spaces, and regression models. A software implementation of the proposed metric is made available at the following link: https://github.com/cwi-dis/pointpca.
Read more8/14/2024
0
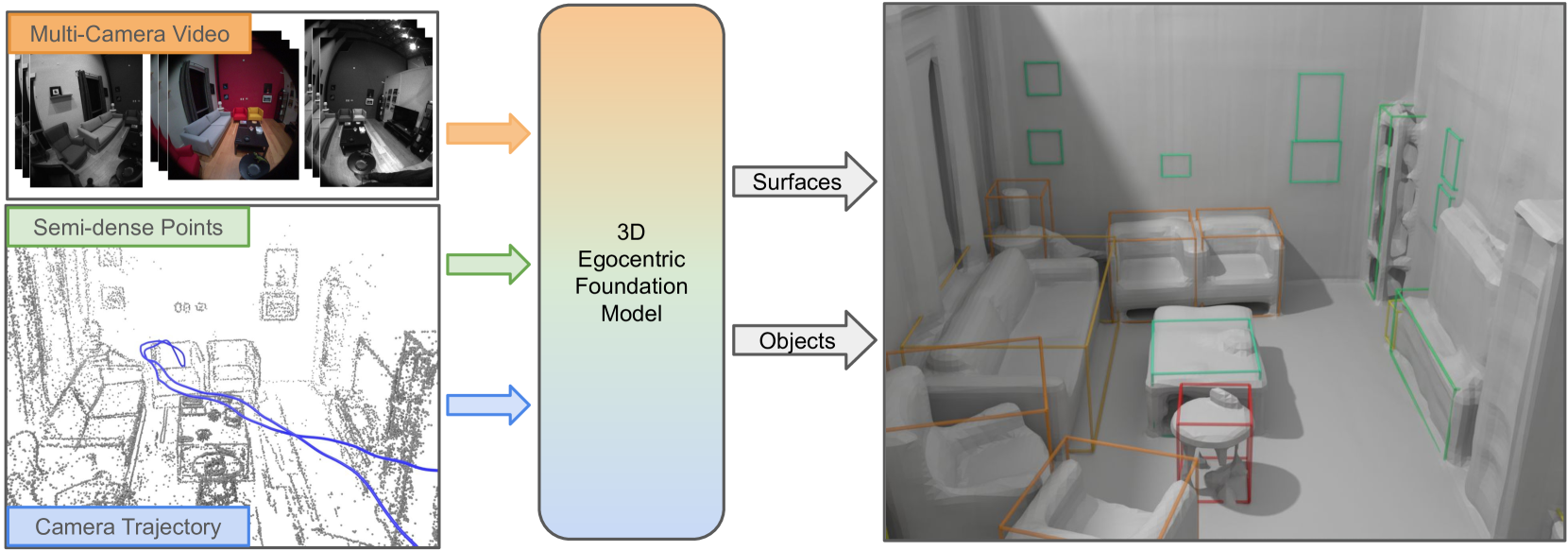
EFM3D: A Benchmark for Measuring Progress Towards 3D Egocentric Foundation Models
Julian Straub, Daniel DeTone, Tianwei Shen, Nan Yang, Chris Sweeney, Richard Newcombe
The advent of wearable computers enables a new source of context for AI that is embedded in egocentric sensor data. This new egocentric data comes equipped with fine-grained 3D location information and thus presents the opportunity for a novel class of spatial foundation models that are rooted in 3D space. To measure progress on what we term Egocentric Foundation Models (EFMs) we establish EFM3D, a benchmark with two core 3D egocentric perception tasks. EFM3D is the first benchmark for 3D object detection and surface regression on high quality annotated egocentric data of Project Aria. We propose Egocentric Voxel Lifting (EVL), a baseline for 3D EFMs. EVL leverages all available egocentric modalities and inherits foundational capabilities from 2D foundation models. This model, trained on a large simulated dataset, outperforms existing methods on the EFM3D benchmark.
Read more6/17/2024