A rationale from frequency perspective for grokking in training neural network

0

Sign in to get full access
Overview
- This paper presents a rationale for the phenomenon of "grokking" in the training of neural networks from a frequency perspective.
- Grokking refers to the rapid improvement in performance of a neural network model during training, after a period of slow progress.
- The authors propose that grokking can be explained by the network's ability to capitalize on low-frequency components in the training data, which become increasingly important as training progresses.
Plain English Explanation
Neural networks often exhibit a behavior during training called "grokking," where the model's performance suddenly improves rapidly after a period of slow progress. The authors of this paper provide an explanation for this phenomenon from the perspective of how the network processes different frequency components in the training data.
The key idea is that at the beginning of training, neural networks tend to focus on learning the high-frequency components of the data, which are the easy-to-capture patterns. As training progresses, the network becomes better at recognizing these high-frequency components, and it can then start to leverage the more important low-frequency components of the data, leading to the rapid performance improvement known as grokking.
The authors suggest that this frequency-based perspective on grokking can help us better understand the inner workings of neural networks and potentially guide the design of more effective training strategies.
Technical Explanation
The paper presents a theoretical analysis of how neural networks process different frequency components in the training data and how this relates to the grokking phenomenon.
The authors start by showing that neural networks initially focus on learning the high-frequency components of the data, which are the easier-to-capture patterns. As training progresses, the network becomes better at recognizing these high-frequency components and can then start to leverage the more important low-frequency components, leading to the rapid performance improvement known as grokking.
The authors support their hypothesis with both theoretical analysis and empirical evidence from experiments on various benchmark datasets. They demonstrate that the network's ability to capture low-frequency components is a key factor in determining the occurrence and timing of the grokking event.
Critical Analysis
The paper provides a compelling frequency-based explanation for the grokking phenomenon in neural network training, which aligns well with existing research in this area. The authors' theoretical analysis and experimental results seem robust and well-supported.
One potential limitation of the study is that it focuses on relatively simple benchmark datasets and architectures. It would be valuable to see how well the frequency-based perspective on grokking generalizes to more complex, real-world datasets and neural network models.
Overall, this paper offers a valuable contribution to our understanding of the inner workings of neural networks and the grokking phenomenon. The frequency-based perspective presented here could help guide the development of more effective training strategies and architectures, especially for applications where grokking is a key concern.
Conclusion
This paper presents a frequency-based rationale for the grokking phenomenon observed during the training of neural networks. The authors show that neural networks initially focus on learning high-frequency components of the training data, but as training progresses, they can start to leverage the more important low-frequency components, leading to the rapid performance improvement known as grokking.
This frequency-based perspective on grokking aligns well with existing research in this area and offers a promising avenue for further exploration and potential applications. By better understanding the role of frequency components in neural network training, we can work towards developing more effective and efficient machine learning models, especially for real-world problems where grokking is a key concern.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A rationale from frequency perspective for grokking in training neural network
Zhangchen Zhou, Yaoyu Zhang, Zhi-Qin John Xu
Grokking is the phenomenon where neural networks NNs initially fit the training data and later generalize to the test data during training. In this paper, we empirically provide a frequency perspective to explain the emergence of this phenomenon in NNs. The core insight is that the networks initially learn the less salient frequency components present in the test data. We observe this phenomenon across both synthetic and real datasets, offering a novel viewpoint for elucidating the grokking phenomenon by characterizing it through the lens of frequency dynamics during the training process. Our empirical frequency-based analysis sheds new light on understanding the grokking phenomenon and its underlying mechanisms.
Read more5/29/2024
0
Deep Grokking: Would Deep Neural Networks Generalize Better?
Simin Fan, Razvan Pascanu, Martin Jaggi
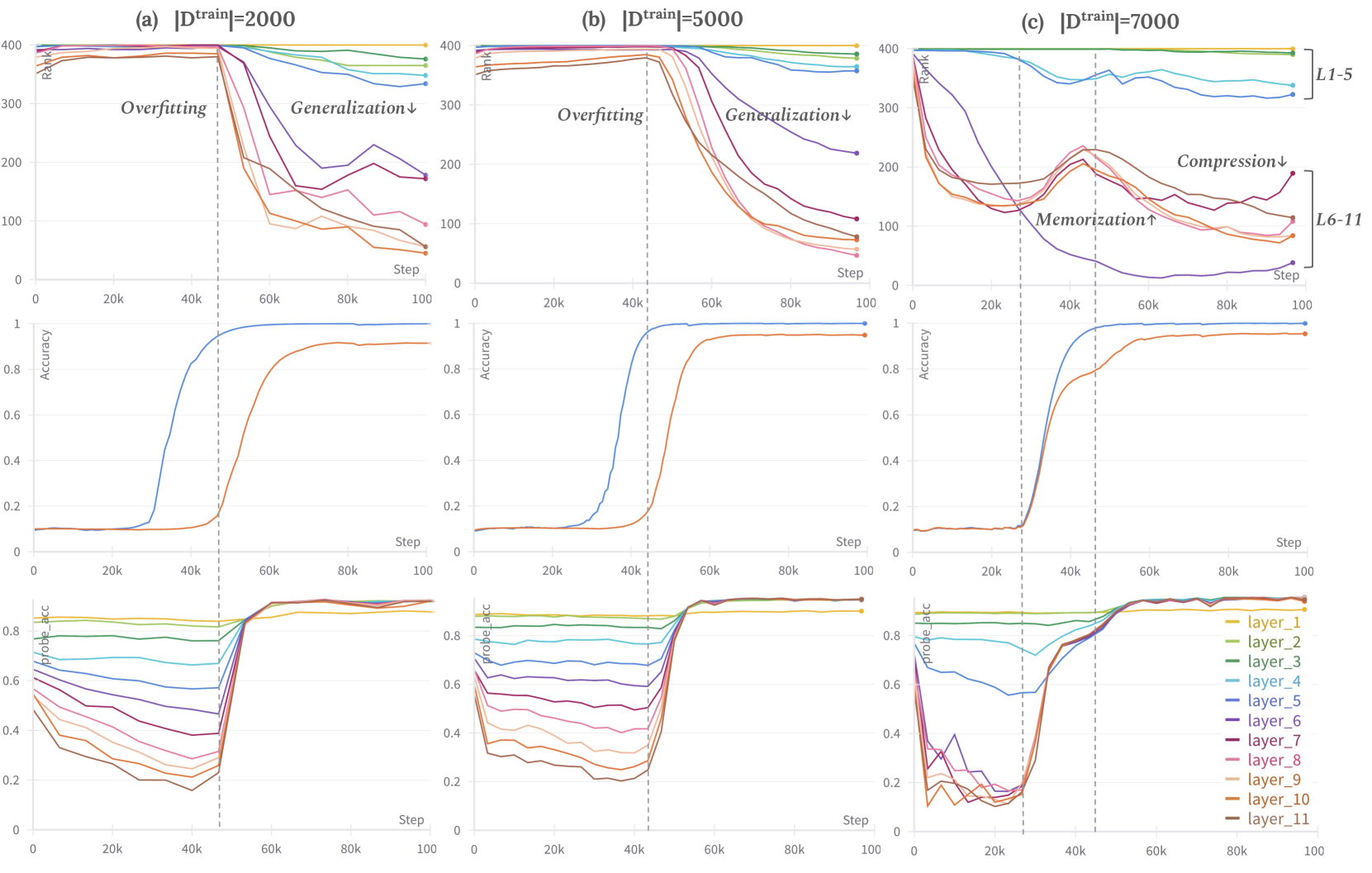
Recent research on the grokking phenomenon has illuminated the intricacies of neural networks' training dynamics and their generalization behaviors. Grokking refers to a sharp rise of the network's generalization accuracy on the test set, which occurs long after an extended overfitting phase, during which the network perfectly fits the training set. While the existing research primarily focus on shallow networks such as 2-layer MLP and 1-layer Transformer, we explore grokking on deep networks (e.g. 12-layer MLP). We empirically replicate the phenomenon and find that deep neural networks can be more susceptible to grokking than its shallower counterparts. Meanwhile, we observe an intriguing multi-stage generalization phenomenon when increase the depth of the MLP model where the test accuracy exhibits a secondary surge, which is scarcely seen on shallow models. We further uncover compelling correspondences between the decreasing of feature ranks and the phase transition from overfitting to the generalization stage during grokking. Additionally, we find that the multi-stage generalization phenomenon often aligns with a double-descent pattern in feature ranks. These observations suggest that internal feature rank could serve as a more promising indicator of the model's generalization behavior compared to the weight-norm. We believe our work is the first one to dive into grokking in deep neural networks, and investigate the relationship of feature rank and generalization performance.
Read more5/31/2024
0
Grokking as the Transition from Lazy to Rich Training Dynamics
Tanishq Kumar, Blake Bordelon, Samuel J. Gershman, Cengiz Pehlevan
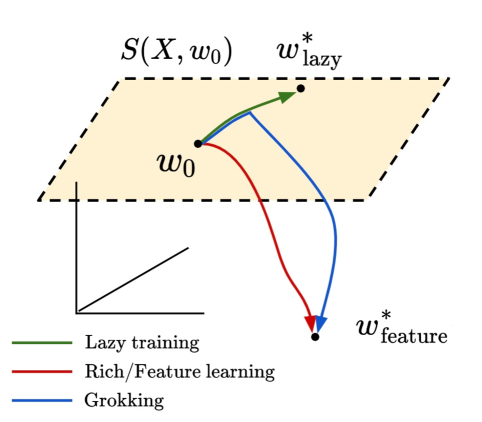
We propose that the grokking phenomenon, where the train loss of a neural network decreases much earlier than its test loss, can arise due to a neural network transitioning from lazy training dynamics to a rich, feature learning regime. To illustrate this mechanism, we study the simple setting of vanilla gradient descent on a polynomial regression problem with a two layer neural network which exhibits grokking without regularization in a way that cannot be explained by existing theories. We identify sufficient statistics for the test loss of such a network, and tracking these over training reveals that grokking arises in this setting when the network first attempts to fit a kernel regression solution with its initial features, followed by late-time feature learning where a generalizing solution is identified after train loss is already low. We find that the key determinants of grokking are the rate of feature learning -- which can be controlled precisely by parameters that scale the network output -- and the alignment of the initial features with the target function $y(x)$. We argue this delayed generalization arises when (1) the top eigenvectors of the initial neural tangent kernel and the task labels $y(x)$ are misaligned, but (2) the dataset size is large enough so that it is possible for the network to generalize eventually, but not so large that train loss perfectly tracks test loss at all epochs, and (3) the network begins training in the lazy regime so does not learn features immediately. We conclude with evidence that this transition from lazy (linear model) to rich training (feature learning) can control grokking in more general settings, like on MNIST, one-layer Transformers, and student-teacher networks.
Read more4/12/2024
0
Deep Networks Always Grok and Here is Why
Ahmed Imtiaz Humayun, Randall Balestriero, Richard Baraniuk
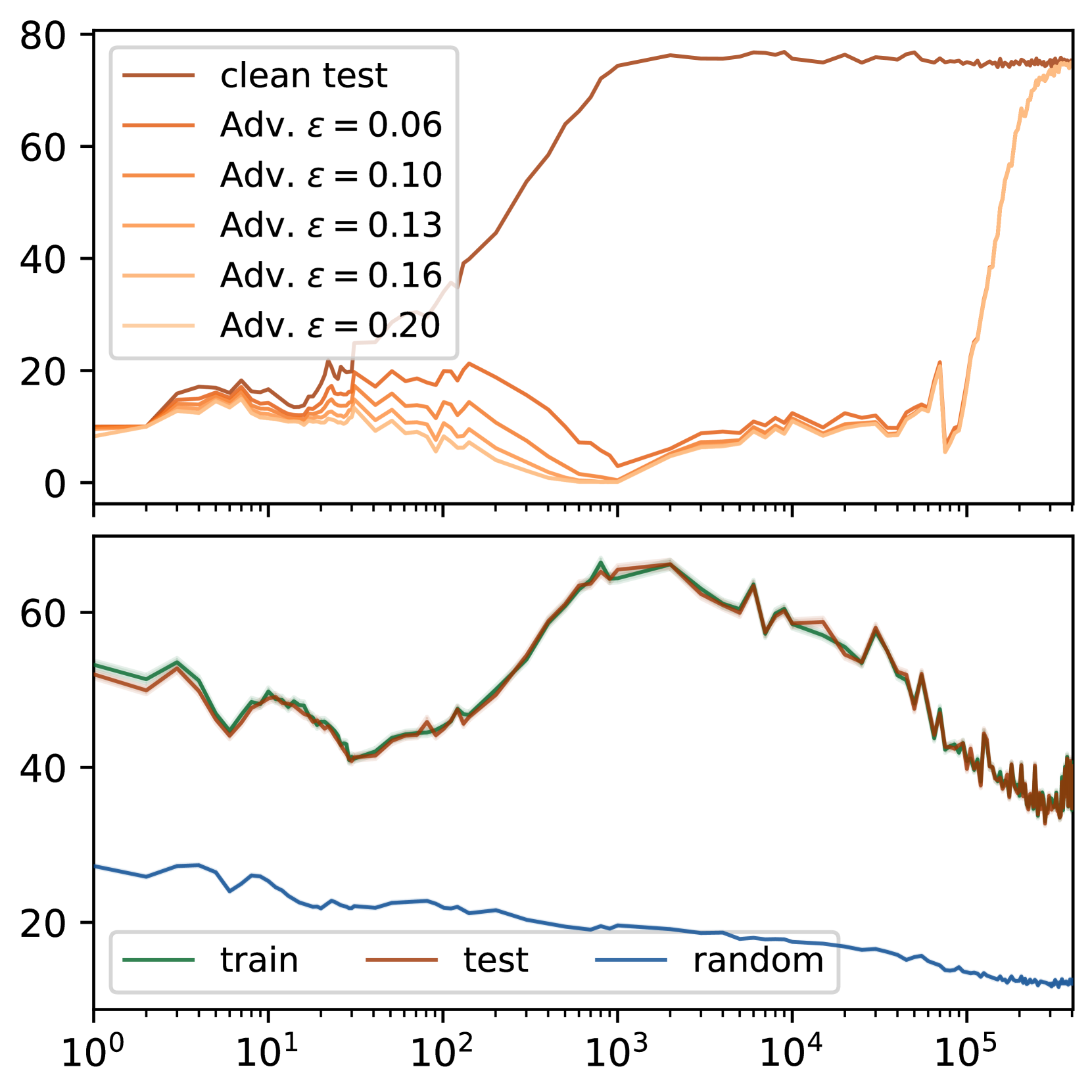
Grokking, or delayed generalization, is a phenomenon where generalization in a deep neural network (DNN) occurs long after achieving near zero training error. Previous studies have reported the occurrence of grokking in specific controlled settings, such as DNNs initialized with large-norm parameters or transformers trained on algorithmic datasets. We demonstrate that grokking is actually much more widespread and materializes in a wide range of practical settings, such as training of a convolutional neural network (CNN) on CIFAR10 or a Resnet on Imagenette. We introduce the new concept of delayed robustness, whereby a DNN groks adversarial examples and becomes robust, long after interpolation and/or generalization. We develop an analytical explanation for the emergence of both delayed generalization and delayed robustness based on the local complexity of a DNN's input-output mapping. Our local complexity measures the density of so-called linear regions (aka, spline partition regions) that tile the DNN input space and serves as a utile progress measure for training. We provide the first evidence that, for classification problems, the linear regions undergo a phase transition during training whereafter they migrate away from the training samples (making the DNN mapping smoother there) and towards the decision boundary (making the DNN mapping less smooth there). Grokking occurs post phase transition as a robust partition of the input space thanks to the linearization of the DNN mapping around the training points. Website: https://bit.ly/grok-adversarial
Read more6/10/2024