Skills Made to Order: Efficient Acquisition of Robot Cooking Skills Guided by Multiple Forms of Internet Data

0
Sign in to get full access
Overview
- Efficient acquisition of robot cooking skills guided by multiple forms of internet data
- Utilizing online cooking videos, recipes, and other web resources to rapidly train robots to perform cooking tasks
- Developing techniques to extract transferable skills from these diverse data sources
Plain English Explanation
This paper presents an approach for efficiently training robots to perform cooking tasks by leveraging a variety of online data sources. The researchers recognized that there is a wealth of information available on the internet, such as cooking videos, recipes, and other relevant resources, that could be used to rapidly teach robots new skills.
By analyzing these diverse data sources, the researchers were able to extract transferable skills that could then be used to enable robots to follow abstract cooking instructions and complete tasks. This approach allows robots to learn by watching and quickly adapt to new cooking scenarios, rather than requiring extensive manual programming.
The key innovation of this work is the ability to leverage a wide range of internet data to efficiently train robots with cooking skills, which has the potential to greatly accelerate the development of capable robotic assistants for tasks like food preparation.
Technical Explanation
The paper proposes a framework for efficiently acquiring robot cooking skills by utilizing multiple forms of internet data, including cooking videos, recipes, and other relevant web resources. The researchers developed techniques to extract transferable skills from these diverse data sources and enable robots to follow abstract cooking instructions and complete tasks.
The approach involves three main components:
- Data Collection and Preprocessing: Gathering relevant cooking-related data from the internet, including videos, recipes, and other resources, and preprocessing it to extract meaningful information.
- Skill Extraction and Transfer: Analyzing the collected data to identify transferable cooking skills that can be used to train the robot.
- Robot Skill Acquisition: Leveraging the extracted skills to rapidly train the robot to perform cooking tasks, without the need for extensive manual programming.
The researchers demonstrated the effectiveness of their approach through a series of experiments, where they were able to efficiently train a robot to perform various cooking tasks by utilizing the knowledge and skills gleaned from online data sources.
Critical Analysis
The paper presents a novel and promising approach for training robots to perform cooking tasks, with the key advantage of leveraging a wide range of internet data to rapidly acquire the necessary skills. However, the researchers acknowledge several limitations and areas for further research:
- The current approach is limited to relatively simple cooking tasks and may struggle with more complex or unfamiliar scenarios. Extending the techniques to handle a broader range of cooking skills and situations would be an important next step.
- The reliance on internet data may introduce biases or inconsistencies that could affect the robot's performance. Developing methods to better curate and validate the collected data could help address this issue.
- The transfer of skills between different robot platforms and environments is not fully explored and may require additional work to ensure seamless adaptation.
Additionally, while the paper focuses on cooking tasks, the underlying principles of the approach could potentially be applied to other domains where diverse online data sources could be leveraged to train robots. Exploring these broader applications could further expand the impact of this research.
Conclusion
This paper presents a novel and efficient approach for training robots to perform cooking tasks by leveraging multiple forms of internet data, including cooking videos, recipes, and other relevant web resources. The key innovation is the ability to extract transferable skills from these diverse data sources and rapidly train robots to follow abstract cooking instructions and complete tasks.
This work has the potential to significantly accelerate the development of capable robotic assistants for tasks like food preparation, by allowing them to learn by watching and adapt to new scenarios more efficiently. While the current approach has some limitations, the underlying principles could be extended to other domains, further expanding the impact of this research.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Skills Made to Order: Efficient Acquisition of Robot Cooking Skills Guided by Multiple Forms of Internet Data
Mrinal Verghese, Christopher Atkeson
This study explores the utility of various internet data sources to select among a set of template robot behaviors to perform skills. Learning contact-rich skills involving tool use from internet data sources has typically been challenging due to the lack of physical information such as contact existence, location, areas, and force in this data. Prior works have generally used internet data and foundation models trained on this data to generate low-level robot behavior. We hypothesize that these data and models may be better suited to selecting among a set of basic robot behaviors to perform these contact-rich skills. We explore three methods of template selection: querying large language models, comparing video of robot execution to retrieved human video using features from a pretrained video encoder common in prior work, and performing the same comparison using features from an optic flow encoder trained on internet data. Our results show that LLMs are surprisingly capable template selectors despite their lack of visual information, optical flow encoding significantly outperforms video encoders trained with an order of magnitude more data, and important synergies exist between various forms of internet data for template selection. By exploiting these synergies, we create a template selector using multiple forms of internet data that achieves a 79% success rate on a set of 16 different cooking skills involving tool-use.
Read more9/24/2024
0
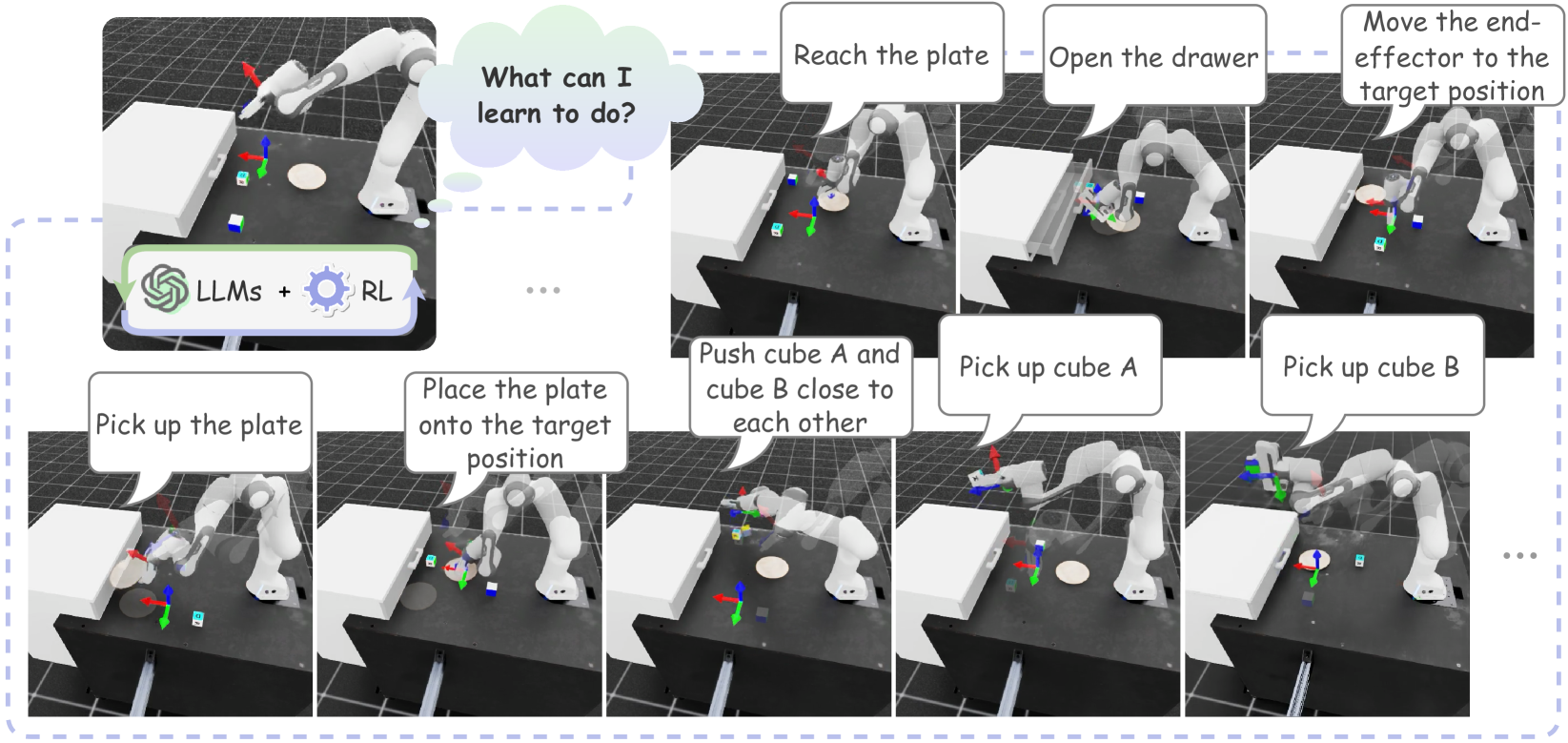
Agentic Skill Discovery
Xufeng Zhao, Cornelius Weber, Stefan Wermter
Language-conditioned robotic skills make it possible to apply the high-level reasoning of Large Language Models (LLMs) to low-level robotic control. A remaining challenge is to acquire a diverse set of fundamental skills. Existing approaches either manually decompose a complex task into atomic robotic actions in a top-down fashion, or bootstrap as many combinations as possible in a bottom-up fashion to cover a wider range of task possibilities. These decompositions or combinations, however, require an initial skill library. For example, a ``grasping'' capability can never emerge from a skill library containing only diverse ``pushing'' skills. Existing skill discovery techniques with reinforcement learning acquire skills by an exhaustive exploration but often yield non-meaningful behaviors. In this study, we introduce a novel framework for skill discovery that is entirely driven by LLMs. The framework begins with an LLM generating task proposals based on the provided scene description and the robot's configurations, aiming to incrementally acquire new skills upon task completion. For each proposed task, a series of reinforcement learning processes are initiated, utilizing reward and success determination functions sampled by the LLM to develop the corresponding policy. The reliability and trustworthiness of learned behaviors are further ensured by an independent vision-language model. We show that starting with zero skill, the skill library emerges and expands to more and more meaningful and reliable skills, enabling the robot to efficiently further propose and complete advanced tasks. Project page: url{https://agentic-skill-discovery.github.io}.
Read more8/19/2024

0
EXTRACT: Efficient Policy Learning by Extracting Transferable Robot Skills from Offline Data
Jesse Zhang, Minho Heo, Zuxin Liu, Erdem Biyik, Joseph J Lim, Yao Liu, Rasool Fakoor
Most reinforcement learning (RL) methods focus on learning optimal policies over low-level action spaces. While these methods can perform well in their training environments, they lack the flexibility to transfer to new tasks. Instead, RL agents that can act over useful, temporally extended skills rather than low-level actions can learn new tasks more easily. Prior work in skill-based RL either requires expert supervision to define useful skills, which is hard to scale, or learns a skill-space from offline data with heuristics that limit the adaptability of the skills, making them difficult to transfer during downstream RL. Our approach, EXTRACT, instead utilizes pre-trained vision language models to extract a discrete set of semantically meaningful skills from offline data, each of which is parameterized by continuous arguments, without human supervision. This skill parameterization allows robots to learn new tasks by only needing to learn when to select a specific skill and how to modify its arguments for the specific task. We demonstrate through experiments in sparse-reward, image-based, robot manipulation environments that EXTRACT can more quickly learn new tasks than prior works, with major gains in sample efficiency and performance over prior skill-based RL. Website at https://www.jessezhang.net/projects/extract/.
Read more9/20/2024

0
Enabling robots to follow abstract instructions and complete complex dynamic tasks
Ruaridh Mon-Williams, Gen Li, Ran Long, Wenqian Du, Chris Lucas
Completing complex tasks in unpredictable settings like home kitchens challenges robotic systems. These challenges include interpreting high-level human commands, such as make me a hot beverage and performing actions like pouring a precise amount of water into a moving mug. To address these challenges, we present a novel framework that combines Large Language Models (LLMs), a curated Knowledge Base, and Integrated Force and Visual Feedback (IFVF). Our approach interprets abstract instructions, performs long-horizon tasks, and handles various uncertainties. It utilises GPT-4 to analyse the user's query and surroundings, then generates code that accesses a curated database of functions during execution. It translates abstract instructions into actionable steps. Each step involves generating custom code by employing retrieval-augmented generalisation to pull IFVF-relevant examples from the Knowledge Base. IFVF allows the robot to respond to noise and disturbances during execution. We use coffee making and plate decoration to demonstrate our approach, including components ranging from pouring to drawer opening, each benefiting from distinct feedback types and methods. This novel advancement marks significant progress toward a scalable, efficient robotic framework for completing complex tasks in uncertain environments. Our findings are illustrated in an accompanying video and supported by an open-source GitHub repository (released upon paper acceptance).
Read more6/18/2024