Analysis of Multiscale Reinforcement Q-Learning Algorithms for Mean Field Control Games
2405.17017
0
0
Abstract
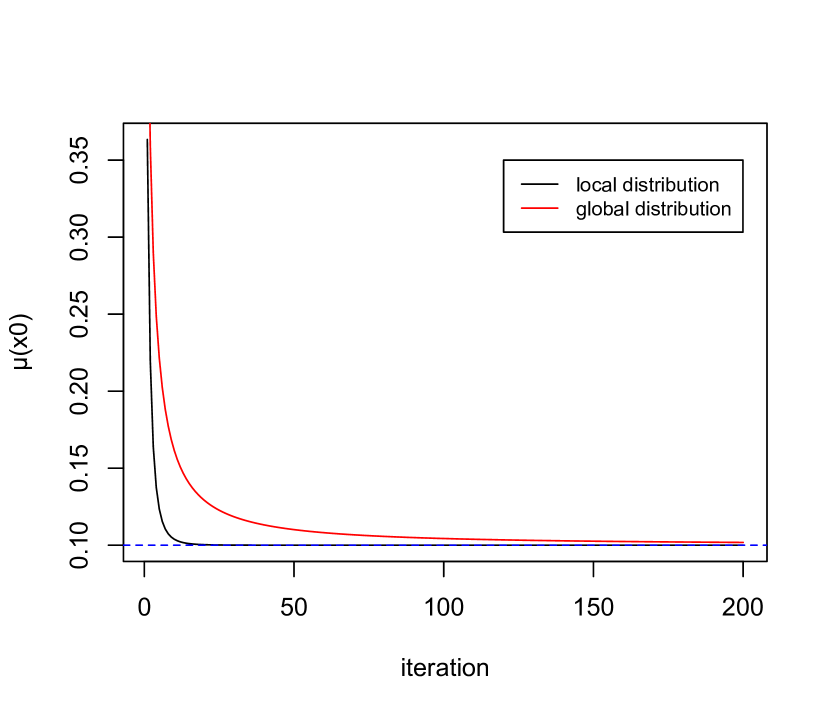
Mean Field Control Games (MFCG), introduced in [Angiuli et al., 2022a], represent competitive games between a large number of large collaborative groups of agents in the infinite limit of number and size of groups. In this paper, we prove the convergence of a three-timescale Reinforcement Q-Learning (RL) algorithm to solve MFCG in a model-free approach from the point of view of representative agents. Our analysis uses a Q-table for finite state and action spaces updated at each discrete time-step over an infinite horizon. In [Angiuli et al., 2023], we proved convergence of two-timescale algorithms for MFG and MFC separately highlighting the need to follow multiple population distributions in the MFC case. Here, we integrate this feature for MFCG as well as three rates of update decreasing to zero in the proper ratios. Our technique of proof uses a generalization to three timescales of the two-timescale analysis in [Borkar, 1997]. We give a simple example satisfying the various hypothesis made in the proof of convergence and illustrating the performance of the algorithm.
Create account to get full access
Overview
- This paper analyzes the performance of multiscale reinforcement Q-learning algorithms for solving mean field control games, which are a type of multi-agent reinforcement learning problem.
- The authors develop a framework for analyzing the convergence and sample complexity of these algorithms, and provide theoretical guarantees for their performance.
- The paper also presents numerical experiments that validate the theoretical results and demonstrate the practical applicability of the algorithms.
Plain English Explanation
Mean field control games are a way of modeling complex multi-agent systems, where each agent's decision-making is influenced by the average or "mean field" behavior of the other agents. This is similar to the concept of mean field theory in statistical physics. The authors of this paper study algorithms that can learn optimal strategies for these types of games using reinforcement learning.
The key idea is to use a "multiscale" approach, where the algorithm operates at different time scales to balance exploration and exploitation. This allows the algorithm to efficiently learn the optimal policy while dealing with the high-dimensional and complex nature of mean field control games. The authors build on previous work on mean field reinforcement learning algorithms.
The paper provides theoretical guarantees on the convergence and sample complexity of these multiscale reinforcement Q-learning algorithms, meaning they can provably learn good strategies with a reasonable amount of training data. This is an important step towards making these algorithms practical for real-world applications.
Technical Explanation
The authors consider a mean field control game setting, where a large number of homogeneous agents interact with each other and the environment. They develop a multiscale reinforcement Q-learning algorithm that operates on two time scales: a "major" time scale for updating the Q-function, and a "minor" time scale for updating the policy.
The key technical contributions are:
-
A framework for analyzing the convergence and sample complexity of multiscale reinforcement Q-learning algorithms in mean field control games. This builds on prior work on online mean field reinforcement learning.
-
Theoretical guarantees on the performance of the proposed algorithm, including bounds on the suboptimality gap and the number of samples required for convergence.
-
Numerical experiments that validate the theoretical results and demonstrate the practical applicability of the algorithms, including a comparison to other mean field reinforcement learning methods.
The analysis shows that the multiscale approach can effectively balance exploration and exploitation, leading to faster convergence and better sample efficiency compared to standard Q-learning. [This is important for deploying these algorithms in real-world scenarios with limited data, such as in correlated mean field imitation learning.]
Critical Analysis
The paper provides a rigorous theoretical analysis of the proposed multiscale reinforcement Q-learning algorithms, which is a valuable contribution to the literature on mean field reinforcement learning. The authors acknowledge several limitations and areas for future work, such as extending the analysis to more general mean field control game settings and exploring the implications of the assumptions made in the theoretical analysis.
One potential concern is the reliance on certain technical assumptions, such as the Lipschitz continuity of the reward and transition functions, which may not always hold in practice. It would be interesting to see how the algorithms perform under more realistic and challenging scenarios.
Additionally, the paper does not discuss the computational complexity of the algorithms or provide insights into their practical implementation. Exploring the trade-offs between theoretical guarantees and computational efficiency would be a valuable avenue for future research.
Overall, the paper represents an important contribution to the field of mean field reinforcement learning, and the proposed multiscale algorithms have the potential to be useful in a variety of real-world applications, such as traffic optimization, smart grid management, and crowd control.
Conclusion
This paper presents a rigorous analysis of multiscale reinforcement Q-learning algorithms for solving mean field control games, a type of multi-agent reinforcement learning problem. The authors develop a theoretical framework for analyzing the convergence and sample complexity of these algorithms, and provide guarantees on their performance.
The key insight is that a multiscale approach, where the algorithm operates at different time scales, can effectively balance exploration and exploitation, leading to faster convergence and better sample efficiency compared to standard Q-learning. The numerical experiments validate the theoretical results and demonstrate the practical applicability of the algorithms.
Overall, this work represents an important contribution to the field of mean field reinforcement learning, with potential applications in a wide range of complex, multi-agent systems. The theoretical analysis and algorithmic innovations presented in this paper pave the way for further advancements in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Deep Reinforcement Learning for Infinite Horizon Mean Field Problems in Continuous Spaces
Andrea Angiuli, Jean-Pierre Fouque, Ruimeng Hu, Alan Raydan
0
0
We present the development and analysis of a reinforcement learning (RL) algorithm designed to solve continuous-space mean field game (MFG) and mean field control (MFC) problems in a unified manner. The proposed approach pairs the actor-critic (AC) paradigm with a representation of the mean field distribution via a parameterized score function, which can be efficiently updated in an online fashion, and uses Langevin dynamics to obtain samples from the resulting distribution. The AC agent and the score function are updated iteratively to converge, either to the MFG equilibrium or the MFC optimum for a given mean field problem, depending on the choice of learning rates. A straightforward modification of the algorithm allows us to solve mixed mean field control games (MFCGs). The performance of our algorithm is evaluated using linear-quadratic benchmarks in the asymptotic infinite horizon framework.
5/6/2024

Robust Cooperative Multi-Agent Reinforcement Learning:A Mean-Field Type Game Perspective
Muhammad Aneeq uz Zaman, Mathieu Lauri`ere, Alec Koppel, Tamer Bac{s}ar
0
0
In this paper, we study the problem of robust cooperative multi-agent reinforcement learning (RL) where a large number of cooperative agents with distributed information aim to learn policies in the presence of emph{stochastic} and emph{non-stochastic} uncertainties whose distributions are respectively known and unknown. Focusing on policy optimization that accounts for both types of uncertainties, we formulate the problem in a worst-case (minimax) framework, which is is intractable in general. Thus, we focus on the Linear Quadratic setting to derive benchmark solutions. First, since no standard theory exists for this problem due to the distributed information structure, we utilize the Mean-Field Type Game (MFTG) paradigm to establish guarantees on the solution quality in the sense of achieved Nash equilibrium of the MFTG. This in turn allows us to compare the performance against the corresponding original robust multi-agent control problem. Then, we propose a Receding-horizon Gradient Descent Ascent RL algorithm to find the MFTG Nash equilibrium and we prove a non-asymptotic rate of convergence. Finally, we provide numerical experiments to demonstrate the efficacy of our approach relative to a baseline algorithm.
6/21/2024
🏅
Major-Minor Mean Field Multi-Agent Reinforcement Learning
Kai Cui, Christian Fabian, Anam Tahir, Heinz Koeppl
0
0
Multi-agent reinforcement learning (MARL) remains difficult to scale to many agents. Recent MARL using Mean Field Control (MFC) provides a tractable and rigorous approach to otherwise difficult cooperative MARL. However, the strict MFC assumption of many independent, weakly-interacting agents is too inflexible in practice. We generalize MFC to instead simultaneously model many similar and few complex agents -- as Major-Minor Mean Field Control (M3FC). Theoretically, we give approximation results for finite agent control, and verify the sufficiency of stationary policies for optimality together with a dynamic programming principle. Algorithmically, we propose Major-Minor Mean Field MARL (M3FMARL) for finite agent systems instead of the limiting system. The algorithm is shown to approximate the policy gradient of the underlying M3FC MDP. Finally, we demonstrate its capabilities experimentally in various scenarios. We observe a strong performance in comparison to state-of-the-art policy gradient MARL methods.
5/9/2024

A Single Online Agent Can Efficiently Learn Mean Field Games
Chenyu Zhang, Xu Chen, Xuan Di
0
0
Mean field games (MFGs) are a promising framework for modeling the behavior of large-population systems. However, solving MFGs can be challenging due to the coupling of forward population evolution and backward agent dynamics. Typically, obtaining mean field Nash equilibria (MFNE) involves an iterative approach where the forward and backward processes are solved alternately, known as fixed-point iteration (FPI). This method requires fully observed population propagation and agent dynamics over the entire spatial domain, which could be impractical in some real-world scenarios. To overcome this limitation, this paper introduces a novel online single-agent model-free learning scheme, which enables a single agent to learn MFNE using online samples, without prior knowledge of the state-action space, reward function, or transition dynamics. Specifically, the agent updates its policy through the value function (Q), while simultaneously evaluating the mean field state (M), using the same batch of observations. We develop two variants of this learning scheme: off-policy and on-policy QM iteration. We prove that they efficiently approximate FPI, and a sample complexity guarantee is provided. The efficacy of our methods is confirmed by numerical experiments.
5/8/2024