Anticipate & Collab: Data-driven Task Anticipation and Knowledge-driven Planning for Human-robot Collaboration
2404.03587
0
0
Abstract
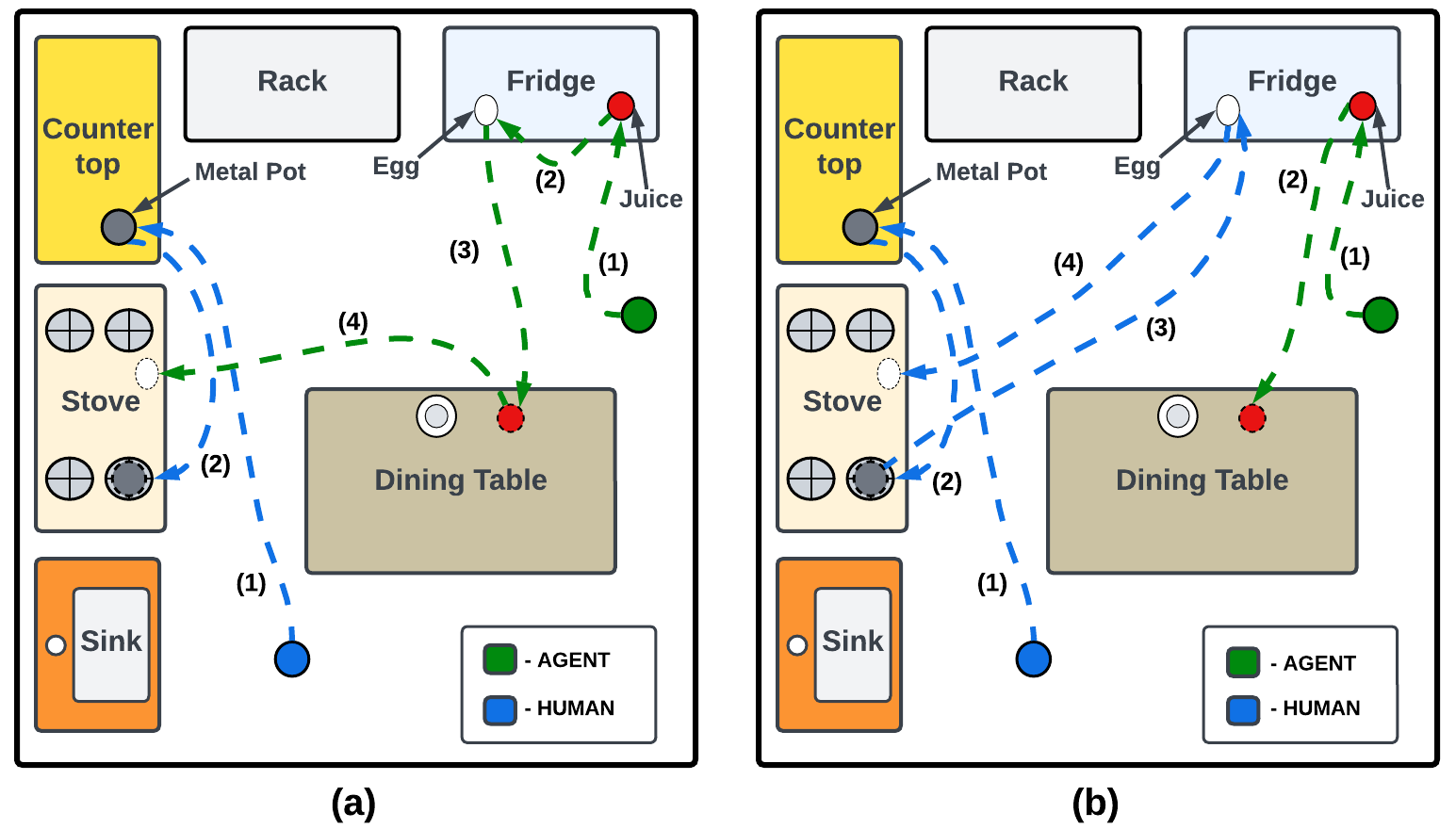
An agent assisting humans in daily living activities can collaborate more effectively by anticipating upcoming tasks. Data-driven methods represent the state of the art in task anticipation, planning, and related problems, but these methods are resource-hungry and opaque. Our prior work introduced a proof of concept framework that used an LLM to anticipate 3 high-level tasks that served as goals for a classical planning system that computed a sequence of low-level actions for the agent to achieve these goals. This paper describes DaTAPlan, our framework that significantly extends our prior work toward human-robot collaboration. Specifically, DaTAPlan planner computes actions for an agent and a human to collaboratively and jointly achieve the tasks anticipated by the LLM, and the agent automatically adapts to unexpected changes in human action outcomes and preferences. We evaluate DaTAPlan capabilities in a realistic simulation environment, demonstrating accurate task anticipation, effective human-robot collaboration, and the ability to adapt to unexpected changes. Project website: https://dataplan-hrc.github.io
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This paper proposes a framework called "Anticipate & Collab" that combines data-driven task anticipation and knowledge-driven planning for human-robot collaboration.
- The framework uses large language models to anticipate the human's upcoming task and then leverages classical planning techniques to generate helpful robot behaviors.
- The goal is to enable seamless and effective collaboration between humans and robots in shared workspaces.
Plain English Explanation
The researchers have developed a system that helps robots work together with humans in a more natural and helpful way. The key idea is for the robot to be able to anticipate what the human is about to do, and then plan how it can assist or collaborate with the human.
To do this, the system uses large language models to try to understand the human's intent and predict their upcoming actions. This is the "data-driven task anticipation" part. The robot then uses classical planning techniques to figure out how it can be helpful and coordinate its actions with the human. This is the "knowledge-driven planning" aspect.
The goal is to enable robots and humans to work seamlessly together, with the robot anticipating the human's needs and proactively assisting them in a natural way, rather than just reacting to the human's commands. This could be very useful in shared workspaces where humans and robots need to collaborate, such as factories, homes, or hospitals.
Technical Explanation
The "Anticipate & Collab" framework combines two key components: data-driven task anticipation and knowledge-driven planning.
For the task anticipation, the system uses large language models that have been trained on vast amounts of language data to try to understand the human's intent and predict their upcoming actions. This allows the robot to anticipate what the human is about to do, rather than just reacting to their current behavior.
The planning component then leverages classical AI planning techniques to generate robot actions that can appropriately assist or collaborate with the anticipated human task. This involves reasoning about the goal, constraints, and step-by-step plan to achieve helpful robot behaviors.
By integrating these two elements - the data-driven anticipation and the knowledge-driven planning - the researchers aim to enable more natural and effective human-robot collaboration, where the robot can proactively support the human in their work.
Critical Analysis
The "Anticipate & Collab" framework presents a promising approach to improving human-robot interaction, but there are some potential limitations and areas for further research.
One key challenge is ensuring the accuracy and reliability of the task anticipation, as large language models can sometimes make mistakes or have biases. The paper does not fully address how the system would handle uncertainty or errors in the anticipation. Further research could explore ways to make the anticipation more robust.
Additionally, the classical planning techniques used may struggle with highly dynamic or complex environments. Incorporating more advanced planning methods could help the robot adapt and collaborate more flexibly.
Finally, the paper does not delve deeply into the issue of human-robot trust and collaboration. Ensuring that humans feel comfortable and willing to work with the robot in a shared workspace will be crucial for the practical deployment of such systems.
Conclusion
The "Anticipate & Collab" framework represents an important step towards enabling more natural and effective human-robot collaboration. By combining data-driven task anticipation and knowledge-driven planning, the system aims to create robots that can proactively assist humans in shared workspaces.
While the approach shows promise, further research is needed to address potential limitations around anticipation accuracy, planning flexibility, and human-robot trust. Nonetheless, this work contributes valuable insights and techniques that could help pave the way for a future where humans and robots work seamlessly together.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Synergising Human-like Responses and Machine Intelligence for Planning in Disaster Response
Savvas Papaioannou, Panayiotis Kolios, Christos G. Panayiotou, Marios M. Polycarpou
0
0
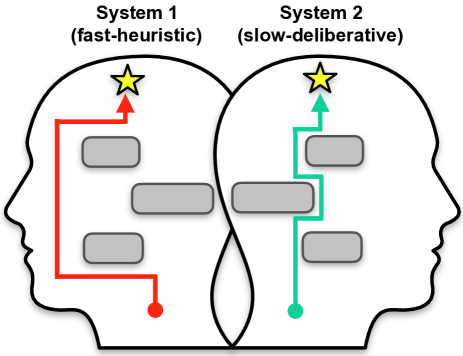
In the rapidly changing environments of disaster response, planning and decision-making for autonomous agents involve complex and interdependent choices. Although recent advancements have improved traditional artificial intelligence (AI) approaches, they often struggle in such settings, particularly when applied to agents operating outside their well-defined training parameters. To address these challenges, we propose an attention-based cognitive architecture inspired by Dual Process Theory (DPT). This framework integrates, in an online fashion, rapid yet heuristic (human-like) responses (System 1) with the slow but optimized planning capabilities of machine intelligence (System 2). We illustrate how a supervisory controller can dynamically determine in real-time the engagement of either system to optimize mission objectives by assessing their performance across a number of distinct attributes. Evaluated for trajectory planning in dynamic environments, our framework demonstrates that this synergistic integration effectively manages complex tasks by optimizing multiple mission objectives.
4/16/2024
👀
HOI4ABOT: Human-Object Interaction Anticipation for Human Intention Reading Collaborative roBOTs
Esteve Valls Mascaro, Daniel Sliwowski, Dongheui Lee
0
0
Robots are becoming increasingly integrated into our lives, assisting us in various tasks. To ensure effective collaboration between humans and robots, it is essential that they understand our intentions and anticipate our actions. In this paper, we propose a Human-Object Interaction (HOI) anticipation framework for collaborative robots. We propose an efficient and robust transformer-based model to detect and anticipate HOIs from videos. This enhanced anticipation empowers robots to proactively assist humans, resulting in more efficient and intuitive collaborations. Our model outperforms state-of-the-art results in HOI detection and anticipation in VidHOI dataset with an increase of 1.76% and 1.04% in mAP respectively while being 15.4 times faster. We showcase the effectiveness of our approach through experimental results in a real robot, demonstrating that the robot's ability to anticipate HOIs is key for better Human-Robot Interaction. More information can be found on our project webpage: https://evm7.github.io/HOI4ABOT_page/
4/9/2024
🛠️
On the Utility of External Agent Intention Predictor for Human-AI Coordination
Chenxu Wang, Zilong Chen, Angelo Cangelosi, Huaping Liu
0
0
Reaching a consensus on the team plans is vital to human-AI coordination. Although previous studies provide approaches through communications in various ways, it could still be hard to coordinate when the AI has no explainable plan to communicate. To cover this gap, we suggest incorporating external models to assist humans in understanding the intentions of AI agents. In this paper, we propose a two-stage paradigm that first trains a Theory of Mind (ToM) model from collected offline trajectories of the target agent, and utilizes the model in the process of human-AI collaboration by real-timely displaying the future action predictions of the target agent. Such a paradigm leaves the AI agent as a black box and thus is available for improving any agents. To test our paradigm, we further implement a transformer-based predictor as the ToM model and develop an extended online human-AI collaboration platform for experiments. The comprehensive experimental results verify that human-AI teams can achieve better performance with the help of our model. A user assessment attached to the experiment further demonstrates that our paradigm can significantly enhance the situational awareness of humans. Our study presents the potential to augment the ability of humans via external assistance in human-AI collaboration, which may further inspire future research.
5/6/2024
Data-Copilot: Bridging Billions of Data and Humans with Autonomous Workflow
Wenqi Zhang, Yongliang Shen, Weiming Lu, Yueting Zhuang
0
0
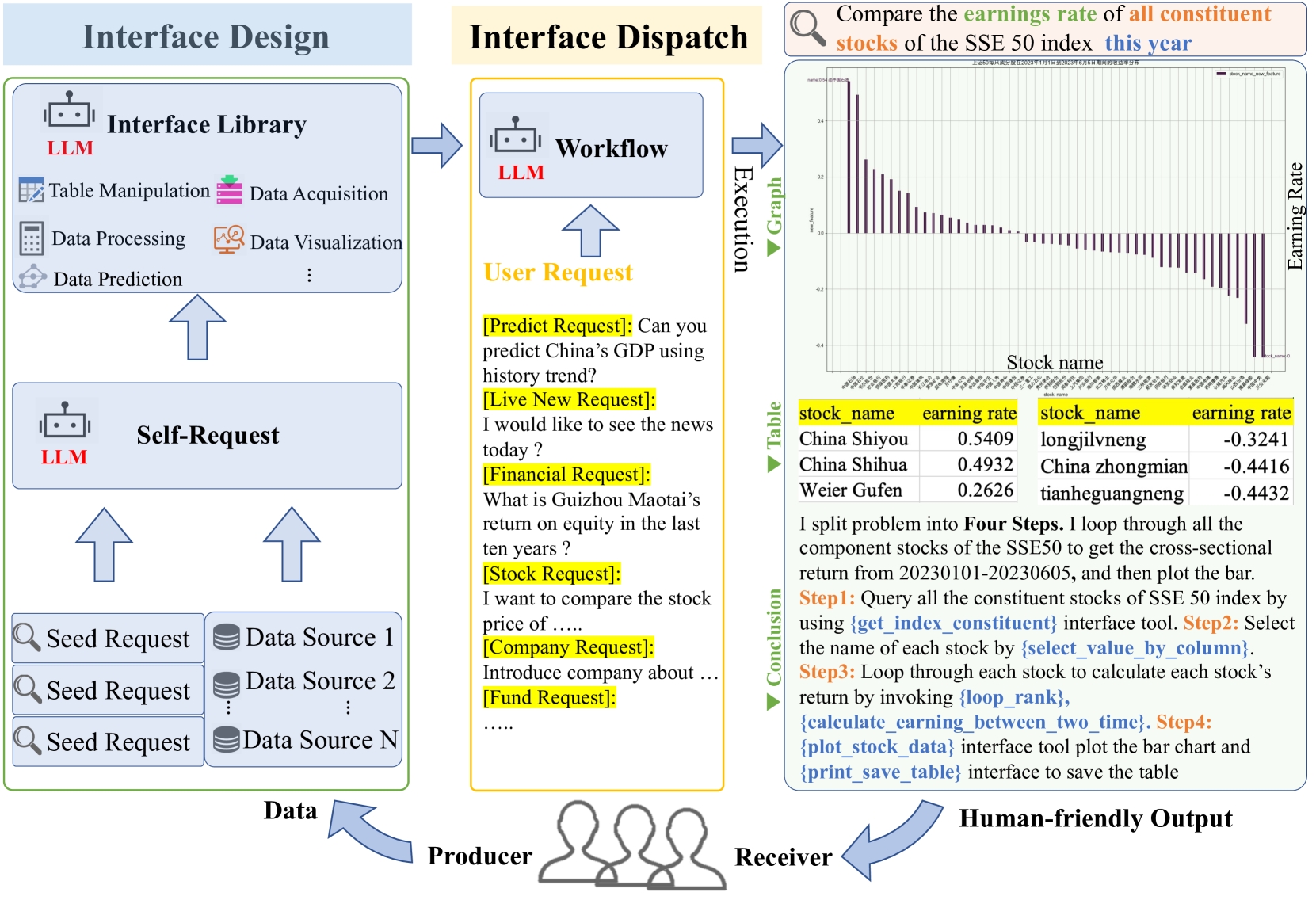
Various industries such as finance, meteorology, and energy produce vast amounts of heterogeneous data every day. There is a natural demand for humans to manage, process, and display data efficiently. However, it necessitates labor-intensive efforts and a high level of expertise for these data-related tasks. Considering large language models (LLMs) showcase promising capabilities in semantic understanding and reasoning, we advocate that the deployment of LLMs could autonomously manage and process massive amounts of data while interacting and displaying in a human-friendly manner. Based on this, we propose Data-Copilot, an LLM-based system that connects numerous data sources on one end and caters to diverse human demands on the other end. Acting as an experienced expert, Data-Copilot autonomously transforms raw data into multi-form output that best matches the user's intent. Specifically, it first designs multiple universal interfaces to satisfy diverse data-related requests, like querying, analysis, prediction, and visualization. In real-time response, it automatically deploys a concise workflow by invoking corresponding interfaces. The whole process is fully controlled by Data-Copilot, without human assistance. We release Data-Copilot-1.0 using massive Chinese financial data, e.g., stocks, funds, and news. Experiments indicate it achieves reliable performance with lower token consumption, showing promising application prospects.
5/8/2024