BiTrack: Bidirectional Offline 3D Multi-Object Tracking Using Camera-LiDAR Data
2406.18414
0
0

Abstract
Compared with real-time multi-object tracking (MOT), offline multi-object tracking (OMOT) has the advantages to perform 2D-3D detection fusion, erroneous link correction, and full track optimization but has to deal with the challenges from bounding box misalignment and track evaluation, editing, and refinement. This paper proposes BiTrack, a 3D OMOT framework that includes modules of 2D-3D detection fusion, initial trajectory generation, and bidirectional trajectory re-optimization to achieve optimal tracking results from camera-LiDAR data. The novelty of this paper includes threefold: (1) development of a point-level object registration technique that employs a density-based similarity metric to achieve accurate fusion of 2D-3D detection results; (2) development of a set of data association and track management skills that utilizes a vertex-based similarity metric as well as false alarm rejection and track recovery mechanisms to generate reliable bidirectional object trajectories; (3) development of a trajectory re-optimization scheme that re-organizes track fragments of different fidelities in a greedy fashion, as well as refines each trajectory with completion and smoothing techniques. The experiment results on the KITTI dataset demonstrate that BiTrack achieves the state-of-the-art performance for 3D OMOT tasks in terms of accuracy and efficiency.
Create account to get full access
Overview
• This paper presents BiTrack, a bidirectional offline 3D multi-object tracking system that uses a fusion of camera and LiDAR data.
• The key innovations of BiTrack include a bidirectional tracking mechanism, an association module that considers both appearance and motion cues, and a graph-based optimization framework for trajectory estimation.
Plain English Explanation
BiTrack is a system that tracks multiple objects in 3D space using data from both cameras and LiDAR sensors. Cameras capture visual information about the objects, while LiDAR sensors measure the 3D positions of the objects.
The bidirectional tracking mechanism in BiTrack means that it can track objects both forward and backward in time. This helps the system maintain consistent identities for the objects even when they are temporarily occluded or go off-screen.
The association module in BiTrack considers both the appearance (visual features) and motion (movement patterns) of the objects to link detections over time and maintain the correct trajectories. This helps the system handle challenging situations like objects crossing paths or merging/splitting.
BiTrack uses a graph-based optimization framework to estimate the final 3D trajectories of the objects. This approach can better handle noise and uncertainties in the sensor data compared to simpler tracking techniques.
Technical Explanation
BiTrack is a 3D multi-object tracking system that fuses data from both camera and LiDAR sensors. The key components of BiTrack include:
-
Bidirectional Tracking: BiTrack performs tracking in both the forward and backward directions in time. This helps maintain consistent object identities even when objects are temporarily occluded or go off-screen.
-
Association Module: BiTrack's association module considers both appearance (visual features) and motion (trajectory patterns) cues to link object detections over time. This robust association helps the system handle challenging scenarios like object crossing and merging/splitting.
-
Graph-based Optimization: BiTrack uses a graph-based optimization framework to estimate the final 3D trajectories of the objects. This approach can better handle noise and uncertainties in the sensor data compared to simpler tracking techniques.
The authors evaluate BiTrack on standard 3D multi-object tracking benchmarks and show that it outperforms state-of-the-art methods in terms of accuracy and robustness.
Critical Analysis
The authors provide a thorough evaluation of BiTrack on several public datasets, demonstrating its superior performance compared to existing 3D multi-object tracking approaches. However, the paper does not extensively discuss the limitations or potential failure cases of the system.
One area for future research could be examining the trade-offs between the bidirectional tracking and the computational complexity of the optimization framework. Additionally, the paper does not address how BiTrack would handle dynamic environments with a large number of objects or rapidly changing occlusions.
Overall, BiTrack represents a significant advancement in 3D multi-object tracking by leveraging the complementary strengths of camera and LiDAR data. The authors' use of a bidirectional tracking mechanism and graph-based optimization is a promising direction for further research in this field.
Conclusion
The BiTrack system presented in this paper is a novel approach to 3D multi-object tracking that fuses data from camera and LiDAR sensors. Its key innovations, including bidirectional tracking, robust association, and graph-based optimization, enable it to outperform state-of-the-art methods in terms of accuracy and robustness.
While the paper does not fully address the potential limitations of the system, BiTrack represents an important step forward in the field of 3D multi-object tracking. The authors' work highlights the significant benefits of leveraging multimodal sensor data and advanced optimization techniques to tackle this challenging problem.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
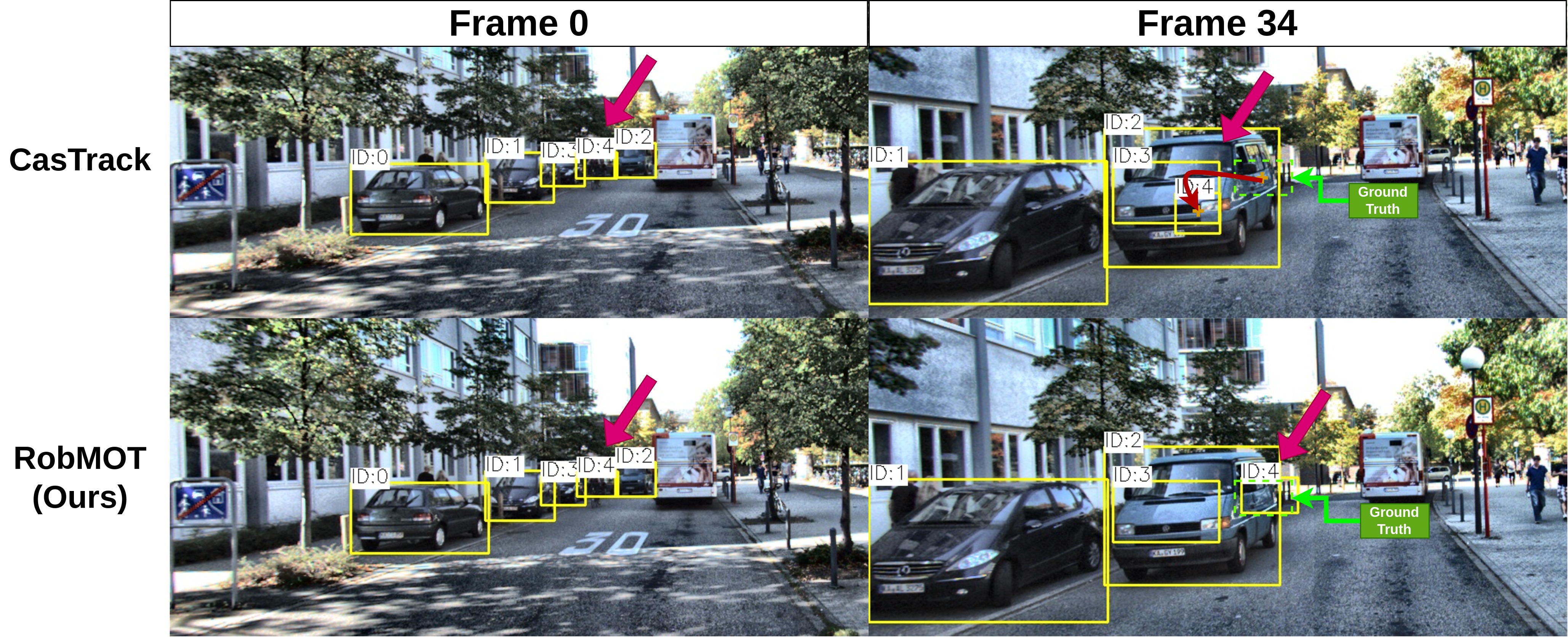
RobMOT: Robust 3D Multi-Object Tracking by Observational Noise and State Estimation Drift Mitigation on LiDAR PointCloud
Mohamed Nagy, Naoufel Werghi, Bilal Hassan, Jorge Dias, Majid Khonji
0
0
This work addresses limitations in recent 3D tracking-by-detection methods, focusing on identifying legitimate trajectories and addressing state estimation drift in Kalman filters. Current methods rely heavily on threshold-based filtering of false positive detections using detection scores to prevent ghost trajectories. However, this approach is inadequate for distant and partially occluded objects, where detection scores tend to drop, potentially leading to false positives exceeding the threshold. Additionally, the literature generally treats detections as precise localizations of objects. Our research reveals that noise in detections impacts localization information, causing trajectory drift for occluded objects and hindering recovery. To this end, we propose a novel online track validity mechanism that temporally distinguishes between legitimate and ghost tracks, along with a multi-stage observational gating process for incoming observations. This mechanism significantly improves tracking performance, with a $6.28%$ in HOTA and a $17.87%$ increase in MOTA. We also introduce a refinement to the Kalman filter that enhances noise mitigation in trajectory drift, leading to more robust state estimation for occluded objects. Our framework, RobMOT, outperforms state-of-the-art methods, including deep learning approaches, across various detectors, achieving up to a $4%$ margin in HOTA and $6%$ in MOTA. RobMOT excels under challenging conditions, such as prolonged occlusions and tracking distant objects, with up to a 59% improvement in processing latency.
6/21/2024

Multi-Object Tracking with Camera-LiDAR Fusion for Autonomous Driving
Riccardo Pieroni, Simone Specchia, Matteo Corno, Sergio Matteo Savaresi
0
0
This paper presents a novel multi-modal Multi-Object Tracking (MOT) algorithm for self-driving cars that combines camera and LiDAR data. Camera frames are processed with a state-of-the-art 3D object detector, whereas classical clustering techniques are used to process LiDAR observations. The proposed MOT algorithm comprises a three-step association process, an Extended Kalman filter for estimating the motion of each detected dynamic obstacle, and a track management phase. The EKF motion model requires the current measured relative position and orientation of the observed object and the longitudinal and angular velocities of the ego vehicle as inputs. Unlike most state-of-the-art multi-modal MOT approaches, the proposed algorithm does not rely on maps or knowledge of the ego global pose. Moreover, it uses a 3D detector exclusively for cameras and is agnostic to the type of LiDAR sensor used. The algorithm is validated both in simulation and with real-world data, with satisfactory results.
5/14/2024

Track Initialization and Re-Identification for~3D Multi-View Multi-Object Tracking
Linh Van Ma, Tran Thien Dat Nguyen, Ba-Ngu Vo, Hyunsung Jang, Moongu Jeon
0
0
We propose a 3D multi-object tracking (MOT) solution using only 2D detections from monocular cameras, which automatically initiates/terminates tracks as well as resolves track appearance-reappearance and occlusions. Moreover, this approach does not require detector retraining when cameras are reconfigured but only the camera matrices of reconfigured cameras need to be updated. Our approach is based on a Bayesian multi-object formulation that integrates track initiation/termination, re-identification, occlusion handling, and data association into a single Bayes filtering recursion. However, the exact filter that utilizes all these functionalities is numerically intractable due to the exponentially growing number of terms in the (multi-object) filtering density, while existing approximations trade-off some of these functionalities for speed. To this end, we develop a more efficient approximation suitable for online MOT by incorporating object features and kinematics into the measurement model, which improves data association and subsequently reduces the number of terms. Specifically, we exploit the 2D detections and extracted features from multiple cameras to provide a better approximation of the multi-object filtering density to realize the track initiation/termination and re-identification functionalities. Further, incorporating a tractable geometric occlusion model based on 2D projections of 3D objects on the camera planes realizes the occlusion handling functionality of the filter. Evaluation of the proposed solution on challenging datasets demonstrates significant improvements and robustness when camera configurations change on-the-fly, compared to existing multi-view MOT solutions. The source code is publicly available at https://github.com/linh-gist/mv-glmb-ab.
5/30/2024
🔎
Multi-Object Tracking based on Imaging Radar 3D Object Detection
Patrick Palmer, Martin Kruger, Richard Altendorfer, Torsten Bertram
0
0
Effective tracking of surrounding traffic participants allows for an accurate state estimation as a necessary ingredient for prediction of future behavior and therefore adequate planning of the ego vehicle trajectory. One approach for detecting and tracking surrounding traffic participants is the combination of a learning based object detector with a classical tracking algorithm. Learning based object detectors have been shown to work adequately on lidar and camera data, while learning based object detectors using standard radar data input have proven to be inferior. Recently, with the improvements to radar sensor technology in the form of imaging radars, the object detection performance on radar was greatly improved but is still limited compared to lidar sensors due to the sparsity of the radar point cloud. This presents a unique challenge for the task of multi-object tracking. The tracking algorithm must overcome the limited detection quality while generating consistent tracks. To this end, a comparison between different multi-object tracking methods on imaging radar data is required to investigate its potential for downstream tasks. The work at hand compares multiple approaches and analyzes their limitations when applied to imaging radar data. Furthermore, enhancements to the presented approaches in the form of probabilistic association algorithms are considered for this task.
6/4/2024