Causality-based Transfer of Driving Scenarios to Unseen Intersections
2404.02046
0
0

Abstract
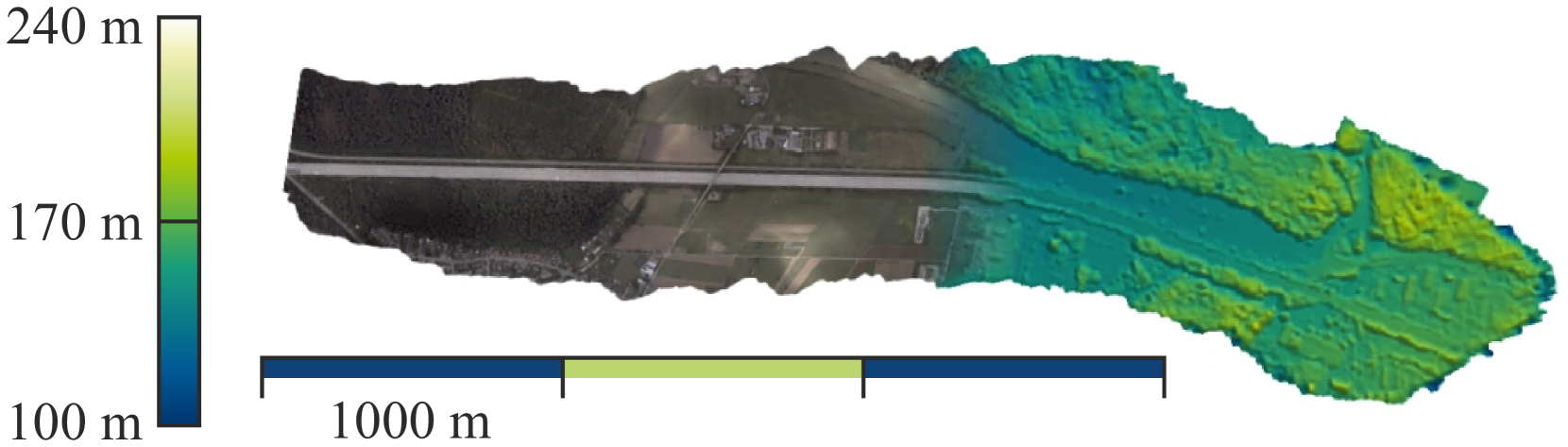
Scenario-based testing of automated driving functions has become a promising method to reduce time and cost compared to real-world testing. In scenario-based testing automated functions are evaluated in a set of pre-defined scenarios. These scenarios provide information about vehicle behaviors, environmental conditions, or road characteristics using parameters. To create realistic scenarios, parameters and parameter dependencies have to be fitted utilizing real-world data. However, due to the large variety of intersections and movement constellations found in reality, data may not be available for certain scenarios. This paper proposes a methodology to systematically analyze relations between parameters of scenarios. Bayesian networks are utilized to analyze causal dependencies in order to decrease the amount of required data and to transfer causal patterns creating unseen scenarios. Thereby, infrastructural influences on movement patterns are investigated to generate realistic scenarios on unobserved intersections. For evaluation, scenarios and underlying parameters are extracted from the inD dataset. Movement patterns are estimated, transferred and checked against recorded data from those initially unseen intersections.
Create account to get full access
Overview
- This paper presents a novel approach for transferring driving scenarios to unseen intersections.
- The key idea is to use causal reasoning to capture the essential elements of a scenario, allowing it to be adapted to different intersection configurations.
- The authors developed a framework that can generate realistic driving behaviors at new intersections without requiring extensive training data.
- The method was evaluated on several unseen intersection scenarios and demonstrated promising results in terms of generating safe and natural-looking driving behaviors.
Plain English Explanation
The paper discusses a way to take driving scenarios that have been learned in one intersection setting and apply them to other, completely different intersections. This is an important problem because autonomous vehicles need to be able to handle a wide variety of driving situations, but collecting training data for every possible intersection is impractical.
The core insight is that we can capture the essential causal factors that define a driving scenario, rather than just memorizing the specific details of one situation. For example, a car making a left turn at an intersection might need to consider factors like the speed and position of oncoming traffic, the traffic signals, the geometry of the intersection, etc. By modeling these causal relationships, the system can adapt the driving behavior to new intersections with different layouts.
The authors developed a technical framework to implement this causal reasoning approach. They first parameterize the driving scenarios in a way that captures the key causal factors. Then, they use this parameterized representation to generate new driving behaviors at unseen intersections. The evaluation shows this approach can produce realistic and safe driving maneuvers, without requiring the system to be retrained from scratch for each new intersection.
Technical Explanation
The paper proposes a "causality-based" approach for transferring driving scenarios to new, unseen intersections. The key steps are:
-
Scenario Parameterization: The authors define a set of causal factors that characterize a driving scenario, such as the positions and velocities of vehicles, traffic signals, intersection geometry, etc. This allows the scenario to be represented in a generalized, parametric form.
-
Causal Modeling: The authors develop a causal model that captures the relationships between these scenario parameters. This causal structure encodes the essential driving logic, rather than just memorizing specific trajectories.
-
Scenario Transfer: Given a new intersection configuration, the causal model can be used to generate appropriate driving behaviors. The causal relationships are adapted to the new context, allowing the scenario to be "transferred" while maintaining realism and safety.
The authors evaluate this approach on several challenging intersection scenarios, including uncontrolled intersections and complex intersection geometries. The results show the transferred driving behaviors are realistic and safe, without requiring the system to be retrained from scratch for each new intersection.
Critical Analysis
A key strength of this work is the use of causal reasoning to capture the core driving logic, rather than just memorizing specific driving trajectories. This allows the system to adapt the scenarios to new contexts in a principled way. The authors also provide a thorough evaluation, demonstrating the method's ability to handle a variety of challenging intersection types.
That said, the paper does not deeply explore the limitations of the causal modeling approach. For example, it's unclear how robust the method would be to highly complex or novel intersection configurations that deviate significantly from the training data. Additionally, the paper does not discuss potential edge cases or failure modes of the generated driving behaviors.
Further research could explore ways to make the causal modeling more flexible and generalizable, perhaps by dynamically updating the model structure as new situations are encountered. The authors could also investigate techniques to ensure the generated behaviors are not only realistic, but also optimal from a safety and efficiency perspective.
Conclusion
This paper presents a promising approach for transferring driving scenarios to unseen intersections using causal reasoning. By capturing the essential causal factors that define a driving situation, the system can adapt the behavior to new intersection configurations without requiring extensive retraining. The results demonstrate the potential of this approach to significantly expand the capabilities of autonomous driving systems, allowing them to handle a wider variety of real-world driving scenarios. Further research to address the method's limitations could lead to even more robust and capable autonomous driving technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
Scene-Extrapolation: Generating Interactive Traffic Scenarios
Maximilian Zipfl, Barbara Schutt, J. Marius Zollner
0
0
Verifying highly automated driving functions can be challenging, requiring identifying relevant test scenarios. Scenario-based testing will likely play a significant role in verifying these systems, predominantly occurring within simulation. In our approach, we use traffic scenes as a starting point (seed-scene) to address the individuality of various highly automated driving functions and to avoid the problems associated with a predefined test traffic scenario. Different highly autonomous driving functions, or their distinct iterations, may display different behaviors under the same operating conditions. To make a generalizable statement about a seed-scene, we simulate possible outcomes based on various behavior profiles. We utilize our lightweight simulation environment and populate it with rule-based and machine learning behavior models for individual actors in the scenario. We analyze resulting scenarios using a variety of criticality metrics. The density distributions of the resulting criticality values enable us to make a profound statement about the significance of a particular scene, considering various eventualities.
4/29/2024

Towards a Completeness Argumentation for Scenario Concepts
Christoph Glasmacher, Hendrik Weber, Lutz Eckstein
0
0
Scenario-based testing has become a promising approach to overcome the complexity of real-world traffic for safety assurance of automated vehicles. Within scenario-based testing, a system under test is confronted with a set of predefined scenarios. This set shall ensure more efficient testing of an automated vehicle operating in an open context compared to real-world testing. However, the question arises if a scenario catalog can cover the open context sufficiently to allow an argumentation for sufficiently safe driving functions and how this can be proven. Within this paper, a methodology is proposed to argue a sufficient completeness of a scenario concept using a goal structured notation. Thereby, the distinction between completeness and coverage is discussed. For both, methods are proposed for a streamlined argumentation and regarding evidence. These methods are applied to a scenario concept and the inD dataset to prove the usability.
4/3/2024
An Approach to Systematic Data Acquisition and Data-Driven Simulation for the Safety Testing of Automated Driving Functions
Leon Eisemann, Mirjam Fehling-Kaschek, Henrik Gommel, David Hermann, Marvin Klemp, Martin Lauer, Benjamin Lickert, Florian Luettner, Robin Moss, Nicole Neis, Maria Pohle, Simon Romanski, Daniel Stadler, Alexander Stolz, Jens Ziehn, Jingxing Zhou
0
0
With growing complexity and criticality of automated driving functions in road traffic and their operational design domains (ODD), there is increasing demand for covering significant proportions of development, validation, and verification in virtual environments and through simulation models. If, however, simulations are meant not only to augment real-world experiments, but to replace them, quantitative approaches are required that measure to what degree and under which preconditions simulation models adequately represent reality, and thus, using their results accordingly. Especially in R&D areas related to the safety impact of the open world, there is a significant shortage of real-world data to parameterize and/or validate simulations - especially with respect to the behavior of human traffic participants, whom automated driving functions will meet in mixed traffic. We present an approach to systematically acquire data in public traffic by heterogeneous means, transform it into a unified representation, and use it to automatically parameterize traffic behavior models for use in data-driven virtual validation of automated driving functions.
5/6/2024
📊
Statistical Modelling of Driving Scenarios in Road Traffic using Fleet Data of Production Vehicles
Christian Reichenbacher, Jochen Hipp, Oliver Bringmann
0
0
Ensuring the safety of road vehicles at an acceptable level requires the absence of any unreasonable risk arising from all potential hazards linked to the intended au-tomated driving function and its implementation. The assurance that there are no unreasonable risks stemming from hazardous behaviours associated to functional insufficiencies is denoted as safety of intended functionality (SOTIF), a concept outlined in the ISO 21448 standard. In this context, the acquisition of real driving data is considered essential for the verification and validation. For this purpose, we are currently developing a method with which data collect-ed representatively from production vehicles can be modelled into a knowledge-based system in the future. A system that represents the probabilities of occur-rence of concrete driving scenarios over the statistical population of road traffic and makes them usable. The method includes the qualitative and quantitative ab-straction of the drives recorded by the sensors in the vehicles, the possibility of subsequent wireless transmission of the abstracted data from the vehicles and the derivation of the distributions and correlations of scenario parameters. This paper provides a summary of the research project and outlines its central idea. To this end, among other things, the needs for statistical information and da-ta from road traffic are elaborated from ISO 21448, the current state of research is addressed, and methodical aspects are discussed.
4/10/2024