Compact 3D Scene Representation via Self-Organizing Gaussian Grids
2312.13299
0
1
Abstract
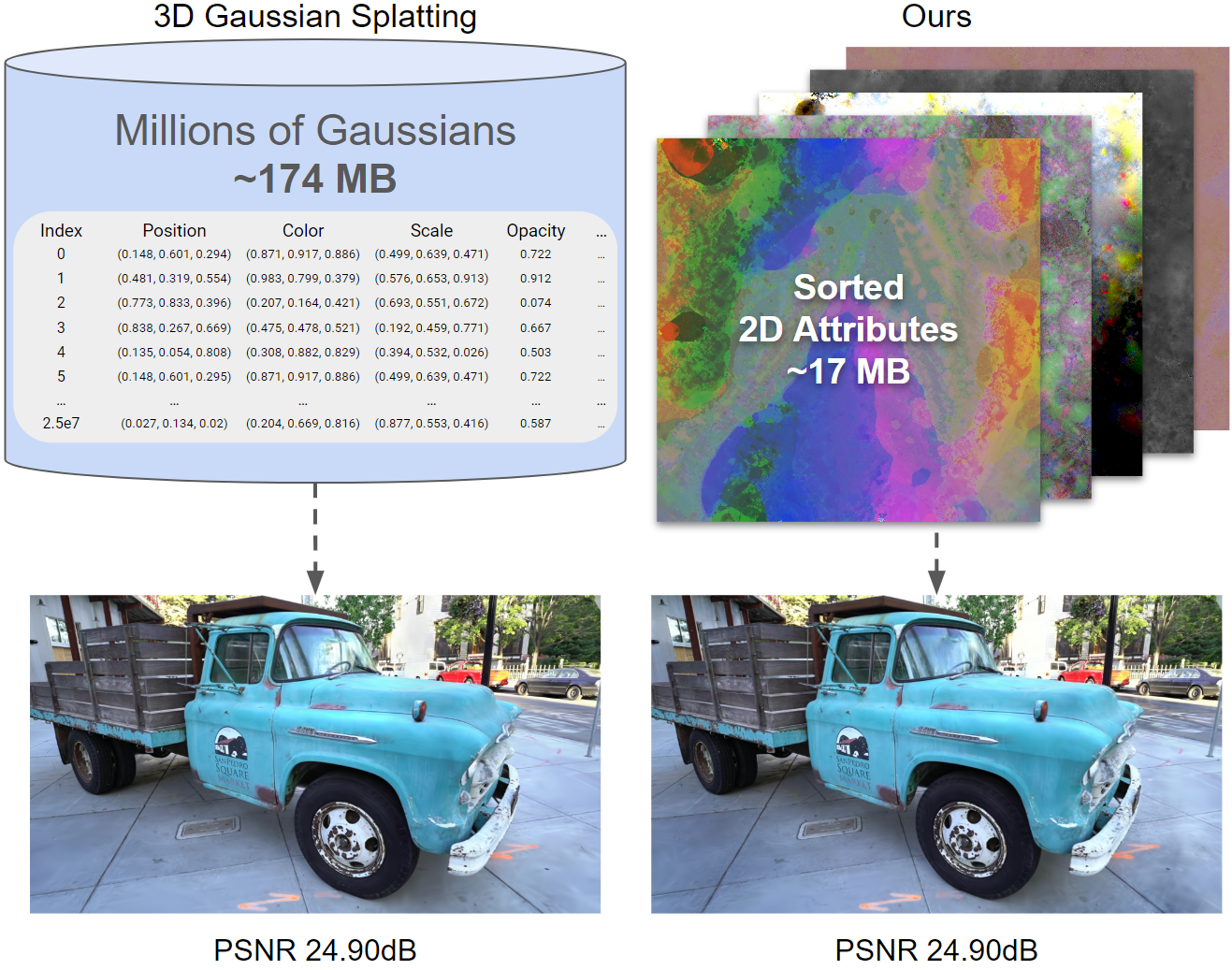
3D Gaussian Splatting has recently emerged as a highly promising technique for modeling of static 3D scenes. In contrast to Neural Radiance Fields, it utilizes efficient rasterization allowing for very fast rendering at high-quality. However, the storage size is significantly higher, which hinders practical deployment, e.g. on resource constrained devices. In this paper, we introduce a compact scene representation organizing the parameters of 3D Gaussian Splatting (3DGS) into a 2D grid with local homogeneity, ensuring a drastic reduction in storage requirements without compromising visual quality during rendering. Central to our idea is the explicit exploitation of perceptual redundancies present in natural scenes. In essence, the inherent nature of a scene allows for numerous permutations of Gaussian parameters to equivalently represent it. To this end, we propose a novel highly parallel algorithm that regularly arranges the high-dimensional Gaussian parameters into a 2D grid while preserving their neighborhood structure. During training, we further enforce local smoothness between the sorted parameters in the grid. The uncompressed Gaussians use the same structure as 3DGS, ensuring a seamless integration with established renderers. Our method achieves a reduction factor of 17x to 42x in size for complex scenes with no increase in training time, marking a substantial leap forward in the domain of 3D scene distribution and consumption. Additional information can be found on our project page: https://fraunhoferhhi.github.io/Self-Organizing-Gaussians/
Create account to get full access
Overview
- This paper proposes a compact 3D scene representation using self-organizing Gaussian grids.
- The approach aims to efficiently encode complex 3D scenes while preserving key details.
- It introduces a novel neural network architecture and training process to learn the Gaussian grid representation.
Plain English Explanation
The paper presents a new way to compactly represent 3D scenes using a technique called "self-organizing Gaussian grids." This approach tries to capture the important details of a 3D scene in an efficient manner, using a grid of Gaussian distributions instead of a traditional 3D mesh or point cloud.
The key idea is to use a neural network to learn this Gaussian grid representation directly from 3D data. The network is trained to organize the grid in a way that best fits the underlying scene geometry, without requiring manual tuning or complex preprocessing steps. This allows the 3D scene to be encoded in a very compact format, which can be useful for applications like efficient 3D scene representation, large-scale Gaussian splatting, and 3D reconstruction.
Technical Explanation
The paper introduces a novel neural network architecture and training process to learn a compact 3D scene representation using self-organizing Gaussian grids. The key components include:
-
Gaussian Grid Representation: The 3D scene is encoded as a grid of Gaussian distributions, where each Gaussian represents a local region of the scene geometry. This allows the scene to be compressed while preserving important details.
-
Neural Network Architecture: The authors design a custom neural network that takes 3D point cloud data as input and learns to organize the Gaussian grid representation. This network consists of encoder and decoder modules, as well as specialized layers to learn the grid parameters.
-
Training Process: The network is trained using a combination of reconstruction loss (to ensure the grid accurately represents the input data) and regularization terms (to encourage a compact and well-organized grid structure). This training procedure allows the network to learn the Gaussian grid in an end-to-end fashion, without requiring manual tuning.
The authors evaluate their approach on several 3D reconstruction benchmarks, demonstrating its effectiveness at compactly encoding complex scenes while preserving key details. The self-organizing Gaussian grid representation can enable more efficient 3D scene processing and reconstruction compared to traditional 3D representations.
Critical Analysis
The paper presents a promising approach for compact 3D scene representation, but there are a few potential limitations and areas for further research:
-
Generalization to Complex Scenes: While the authors demonstrate the method on several benchmark datasets, it's unclear how well it would scale to highly complex, real-world 3D scenes with significant occlusions, varying object scales, and diverse geometries.
-
Computational Efficiency: The neural network training and inference process may still be computationally intensive, especially for large-scale 3D data. Further optimizations may be required to enable real-time or low-latency applications.
-
Interpretability: The learned Gaussian grid representation may be difficult to interpret and analyze, as the grid parameters are not directly tied to semantic scene elements. Incorporating more interpretable scene modeling approaches could be beneficial.
-
Comparison to Alternative 3D Representations: It would be useful to see a more comprehensive comparison to other compact 3D scene representation techniques, such as voxel grids, octrees, or learned point cloud encodings, to better understand the relative strengths and weaknesses of the Gaussian grid approach.
Overall, this paper presents an interesting and potentially impactful contribution to the field of 3D scene representation, but further research and development may be needed to address these limitations and fully realize the benefits of the Gaussian grid approach.
Conclusion
The proposed self-organizing Gaussian grids offer a compact and efficient way to represent 3D scenes, which could have significant implications for a variety of applications, such as 3D reconstruction, large-scale 3D processing, and real-time 3D scene analysis. The novel neural network architecture and training process provide a promising avenue for learning this representation directly from 3D data, without the need for manual tuning or complex preprocessing. While the approach shows promising results, further research is needed to address potential limitations and explore its broader applicability in real-world 3D perception and modeling tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

CompGS: Efficient 3D Scene Representation via Compressed Gaussian Splatting
Xiangrui Liu, Xinju Wu, Pingping Zhang, Shiqi Wang, Zhu Li, Sam Kwong
0
0
Gaussian splatting, renowned for its exceptional rendering quality and efficiency, has emerged as a prominent technique in 3D scene representation. However, the substantial data volume of Gaussian splatting impedes its practical utility in real-world applications. Herein, we propose an efficient 3D scene representation, named Compressed Gaussian Splatting (CompGS), which harnesses compact Gaussian primitives for faithful 3D scene modeling with a remarkably reduced data size. To ensure the compactness of Gaussian primitives, we devise a hybrid primitive structure that captures predictive relationships between each other. Then, we exploit a small set of anchor primitives for prediction, allowing the majority of primitives to be encapsulated into highly compact residual forms. Moreover, we develop a rate-constrained optimization scheme to eliminate redundancies within such hybrid primitives, steering our CompGS towards an optimal trade-off between bitrate consumption and representation efficacy. Experimental results show that the proposed CompGS significantly outperforms existing methods, achieving superior compactness in 3D scene representation without compromising model accuracy and rendering quality. Our code will be released on GitHub for further research.
4/16/2024
🛸
Compact3D: Smaller and Faster Gaussian Splatting with Vector Quantization
KL Navaneet, Kossar Pourahmadi Meibodi, Soroush Abbasi Koohpayegani, Hamed Pirsiavash
0
0
3D Gaussian Splatting (3DGS) is a new method for modeling and rendering 3D radiance fields that achieves much faster learning and rendering time compared to SOTA NeRF methods. However, it comes with the drawback of a much larger storage demand compared to NeRF methods since it needs to store the parameters for millions of 3D Gaussians. We notice that large groups of Gaussians share similar parameters and introduce a simple vector quantization method based on K-means algorithm to quantize the Gaussian parameters. Then, we store the small codebook along with the index of the code for each Gaussian. We compress the indices further by sorting them and using a method similar to run-length encoding. Moreover, we use a simple regularizer that encourages zero opacity (invisible Gaussians) to reduce the number of Gaussians, thereby compressing the model and speeding up the rendering. We do extensive experiments on standard benchmarks as well as an existing 3D dataset that is an order of magnitude larger than the standard benchmarks used in this field. We show that our simple yet effective method can reduce the storage costs for 3DGS by 40 to 50x and rendering time by 2 to 3x with a very small drop in the quality of rendered images.
6/12/2024
Recent Advances in 3D Gaussian Splatting
Tong Wu, Yu-Jie Yuan, Ling-Xiao Zhang, Jie Yang, Yan-Pei Cao, Ling-Qi Yan, Lin Gao
0
0
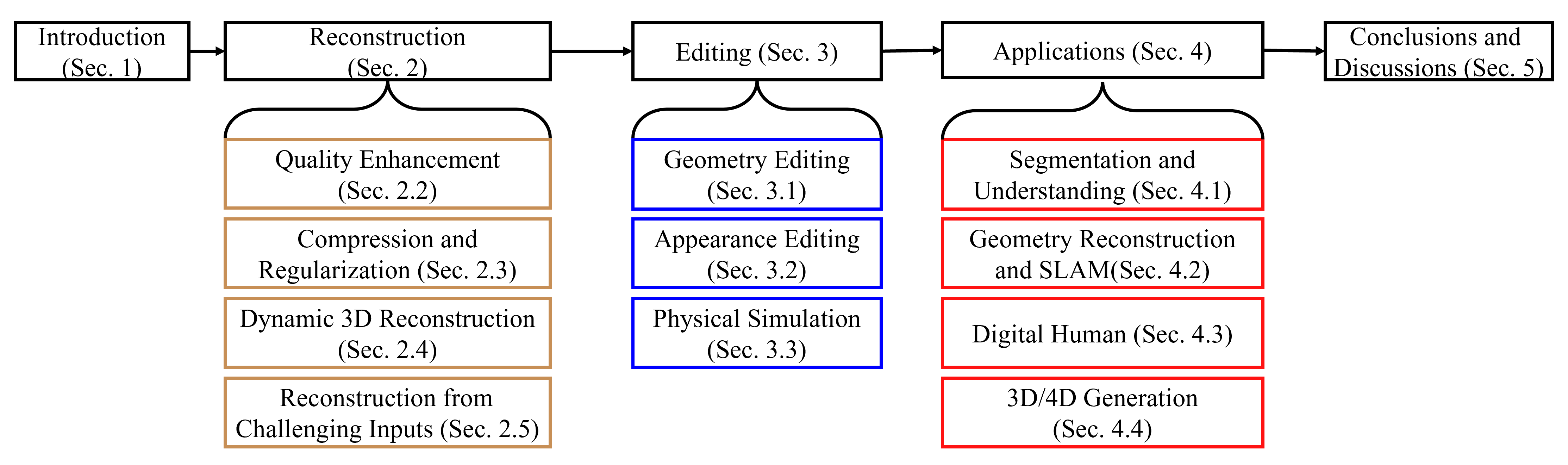
The emergence of 3D Gaussian Splatting (3DGS) has greatly accelerated the rendering speed of novel view synthesis. Unlike neural implicit representations like Neural Radiance Fields (NeRF) that represent a 3D scene with position and viewpoint-conditioned neural networks, 3D Gaussian Splatting utilizes a set of Gaussian ellipsoids to model the scene so that efficient rendering can be accomplished by rasterizing Gaussian ellipsoids into images. Apart from the fast rendering speed, the explicit representation of 3D Gaussian Splatting facilitates editing tasks like dynamic reconstruction, geometry editing, and physical simulation. Considering the rapid change and growing number of works in this field, we present a literature review of recent 3D Gaussian Splatting methods, which can be roughly classified into 3D reconstruction, 3D editing, and other downstream applications by functionality. Traditional point-based rendering methods and the rendering formulation of 3D Gaussian Splatting are also illustrated for a better understanding of this technique. This survey aims to help beginners get into this field quickly and provide experienced researchers with a comprehensive overview, which can stimulate the future development of the 3D Gaussian Splatting representation.
4/16/2024
EfficientGS: Streamlining Gaussian Splatting for Large-Scale High-Resolution Scene Representation
Wenkai Liu, Tao Guan, Bin Zhu, Lili Ju, Zikai Song, Dan Li, Yuesong Wang, Wei Yang
0
0
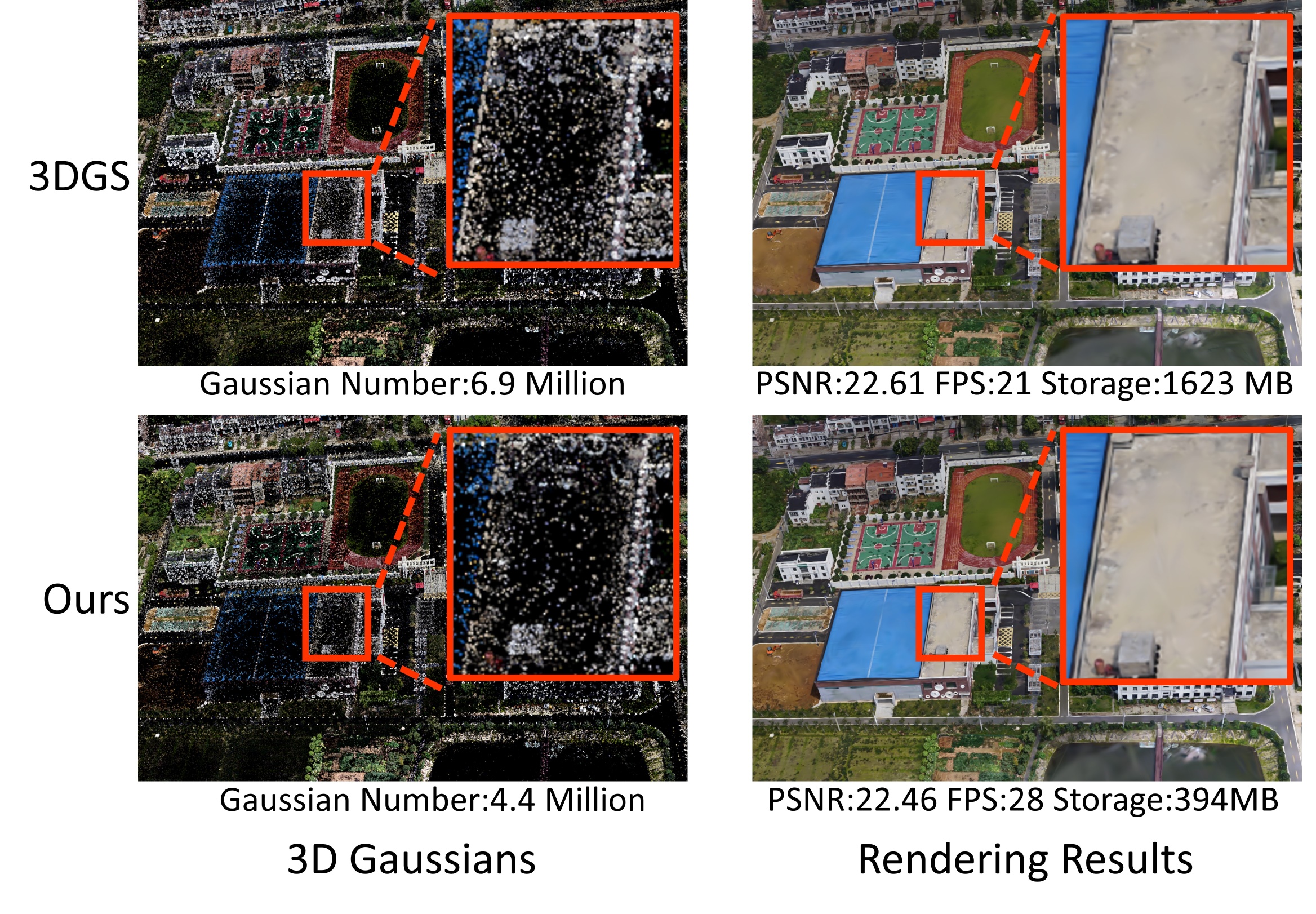
In the domain of 3D scene representation, 3D Gaussian Splatting (3DGS) has emerged as a pivotal technology. However, its application to large-scale, high-resolution scenes (exceeding 4k$times$4k pixels) is hindered by the excessive computational requirements for managing a large number of Gaussians. Addressing this, we introduce 'EfficientGS', an advanced approach that optimizes 3DGS for high-resolution, large-scale scenes. We analyze the densification process in 3DGS and identify areas of Gaussian over-proliferation. We propose a selective strategy, limiting Gaussian increase to key primitives, thereby enhancing the representational efficiency. Additionally, we develop a pruning mechanism to remove redundant Gaussians, those that are merely auxiliary to adjacent ones. For further enhancement, we integrate a sparse order increment for Spherical Harmonics (SH), designed to alleviate storage constraints and reduce training overhead. Our empirical evaluations, conducted on a range of datasets including extensive 4K+ aerial images, demonstrate that 'EfficientGS' not only expedites training and rendering times but also achieves this with a model size approximately tenfold smaller than conventional 3DGS while maintaining high rendering fidelity.
4/22/2024