End-to-end Autonomous Driving: Challenges and Frontiers
2306.16927
0
0

Abstract
The autonomous driving community has witnessed a rapid growth in approaches that embrace an end-to-end algorithm framework, utilizing raw sensor input to generate vehicle motion plans, instead of concentrating on individual tasks such as detection and motion prediction. End-to-end systems, in comparison to modular pipelines, benefit from joint feature optimization for perception and planning. This field has flourished due to the availability of large-scale datasets, closed-loop evaluation, and the increasing need for autonomous driving algorithms to perform effectively in challenging scenarios. In this survey, we provide a comprehensive analysis of more than 270 papers, covering the motivation, roadmap, methodology, challenges, and future trends in end-to-end autonomous driving. We delve into several critical challenges, including multi-modality, interpretability, causal confusion, robustness, and world models, amongst others. Additionally, we discuss current advancements in foundation models and visual pre-training, as well as how to incorporate these techniques within the end-to-end driving framework. we maintain an active repository that contains up-to-date literature and open-source projects at https://github.com/OpenDriveLab/End-to-end-Autonomous-Driving.
Create account to get full access
Overview
- Autonomous driving is a complex challenge with many technical and practical hurdles to overcome
- This paper examines the current state of end-to-end autonomous driving systems and identifies key frontiers for future research
- The authors explore areas like policy learning, simulation, and end-to-end system design that are critical for advancing autonomous driving technology
Plain English Explanation
Autonomous, or self-driving, vehicles are the future of transportation. But building cars that can drive themselves from start to finish is incredibly challenging. This paper looks at the current state of this technology and identifies some of the key issues that researchers need to tackle next.
One big challenge is policy learning - figuring out the best way for the car to make decisions and take actions in complex, real-world driving situations. Another is simulation - using computer models to test self-driving algorithms without risking lives on the road. And tying all the different systems together into a cohesive end-to-end design is crucial.
The authors examine these frontier areas and discuss the progress that's been made, as well as the work that still needs to be done to make fully autonomous cars a reality. It's a complex problem, but one that has huge potential benefits for transportation, safety, and society.
Technical Explanation
The paper provides a comprehensive overview of the current challenges and frontiers in end-to-end autonomous driving systems. One key area explored is policy learning - how the autonomous vehicle can learn to make optimal decisions in complex, dynamic driving scenarios. The authors discuss techniques like deep reinforcement learning and imitation learning that hold promise for teaching cars to navigate the real world.
Another major frontier is simulation - using computer models to extensively test and train autonomous driving algorithms in a safe, controlled environment before deploying them on real roads. The paper examines the advantages and limitations of simulation, as well as efforts to make these virtual environments more realistic and representative of actual driving conditions.
The overarching challenge is designing a cohesive end-to-end autonomous driving system that seamlessly integrates perception, planning, and control. The authors discuss the complexities of this task and highlight promising modular architectures and sparse query-centric approaches that could help tackle the challenge.
Critical Analysis
The paper provides a thorough and thoughtful examination of the key frontiers in autonomous driving, but also acknowledges the significant challenges that remain. For example, the authors note that current simulation environments still fall short of fully capturing the nuance and unpredictability of real-world driving scenarios.
Additionally, the paper highlights the inherent difficulty of end-to-end system design, where subtle errors or misalignments between different components can lead to catastrophic failures. More research is needed to develop robust, fault-tolerant architectures that can reliably handle the myriad scenarios an autonomous vehicle may encounter.
The authors also touch on the ethical and safety considerations around autonomous driving, such as how to ensure these systems behave in a manner that is transparent, accountable, and aligned with human values. Addressing these societal impacts will be crucial as the technology advances.
Overall, the paper provides a clear-eyed assessment of the current state of autonomous driving and the key frontiers that must be explored to realize the full promise of this transformative technology. By identifying these challenges, the authors help pave the way for continued progress and innovation in this critical domain.
Conclusion
This paper offers a comprehensive overview of the key challenges and frontiers in end-to-end autonomous driving systems. It delves into critical areas like policy learning, simulation, and system design, highlighting both the progress made and the significant work that remains.
Autonomous driving has immense potential to transform transportation, improve safety, and benefit society. But realizing this potential requires tackling complex technical hurdles and navigating thorny ethical considerations. By outlining the current frontiers, this paper provides a roadmap for future research and development in this vital field.
As autonomous driving technology continues to advance, papers like this will play a crucial role in guiding the direction of the field and ensuring that the final products are safe, reliable, and align with human values. Careful, thoughtful analysis of the challenges ahead is essential for unlocking the full promise of self-driving vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👀
Applications of Computer Vision in Autonomous Vehicles: Methods, Challenges and Future Directions
Xingshuai Dong, Massimiliano L. Cappuccio
0
0
Autonomous vehicle refers to a vehicle capable of perceiving its surrounding environment and driving with little or no human driver input. The perception system is a fundamental component which enables the autonomous vehicle to collect data and extract relevant information from the environment to drive safely. Benefit from the recent advances in computer vision, the perception task can be achieved by using sensors, such as camera, LiDAR, radar, and ultrasonic sensor. This paper reviews publications on computer vision and autonomous driving that are published during the last ten years. In particular, we first investigate the development of autonomous driving systems and summarize these systems that are developed by the major automotive manufacturers from different countries. Second, we investigate the sensors and benchmark data sets that are commonly utilized for autonomous driving. Then, a comprehensive overview of computer vision applications for autonomous driving such as depth estimation, object detection, lane detection, and traffic sign recognition are discussed. Additionally, we review public opinions and concerns on autonomous vehicles. Based on the discussion, we analyze the current technological challenges that autonomous vehicles meet with. Finally, we present our insights and point out some promising directions for future research. This paper will help the reader to understand autonomous vehicles from the perspectives of academia and industry.
6/18/2024
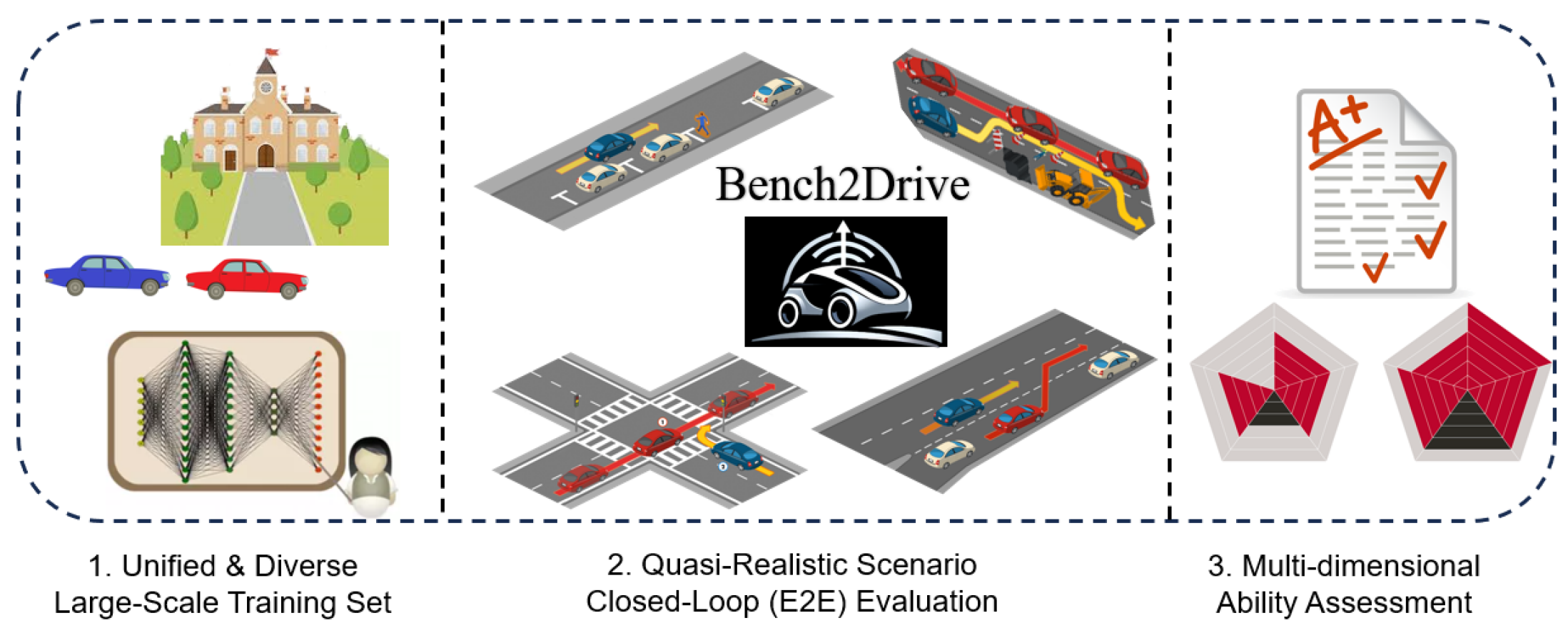
Bench2Drive: Towards Multi-Ability Benchmarking of Closed-Loop End-To-End Autonomous Driving
Xiaosong Jia, Zhenjie Yang, Qifeng Li, Zhiyuan Zhang, Junchi Yan
0
0
In an era marked by the rapid scaling of foundation models, autonomous driving technologies are approaching a transformative threshold where end-to-end autonomous driving (E2E-AD) emerges due to its potential of scaling up in the data-driven manner. However, existing E2E-AD methods are mostly evaluated under the open-loop log-replay manner with L2 errors and collision rate as metrics (e.g., in nuScenes), which could not fully reflect the driving performance of algorithms as recently acknowledged in the community. For those E2E-AD methods evaluated under the closed-loop protocol, they are tested in fixed routes (e.g., Town05Long and Longest6 in CARLA) with the driving score as metrics, which is known for high variance due to the unsmoothed metric function and large randomness in the long route. Besides, these methods usually collect their own data for training, which makes algorithm-level fair comparison infeasible. To fulfill the paramount need of comprehensive, realistic, and fair testing environments for Full Self-Driving (FSD), we present Bench2Drive, the first benchmark for evaluating E2E-AD systems' multiple abilities in a closed-loop manner. Bench2Drive's official training data consists of 2 million fully annotated frames, collected from 10000 short clips uniformly distributed under 44 interactive scenarios (cut-in, overtaking, detour, etc), 23 weathers (sunny, foggy, rainy, etc), and 12 towns (urban, village, university, etc) in CARLA v2. Its evaluation protocol requires E2E-AD models to pass 44 interactive scenarios under different locations and weathers which sums up to 220 routes and thus provides a comprehensive and disentangled assessment about their driving capability under different situations. We implement state-of-the-art E2E-AD models and evaluate them in Bench2Drive, providing insights regarding current status and future directions.
6/12/2024
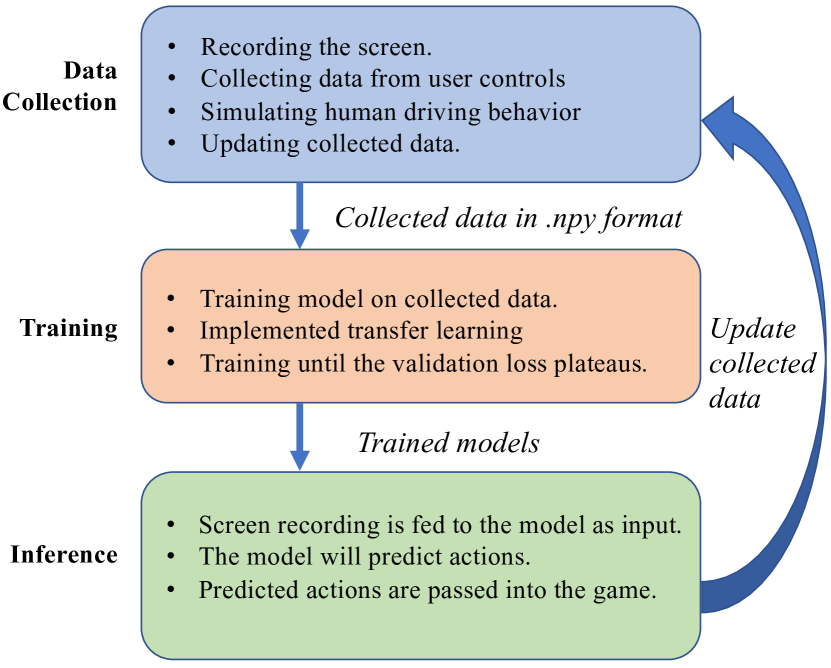
End-To-End Training and Testing Gamification Framework to Learn Human Highway Driving
Satya R. Jaladi, Zhimin Chen, Narahari R. Malayanur, Raja M. Macherla, Bing Li
0
0
The current autonomous stack is well modularized and consists of perception, decision making and control in a handcrafted framework. With the advances in artificial intelligence (AI) and computing resources, researchers have been pushing the development of end-to-end AI for autonomous driving, at least in problems of small searching space such as in highway scenarios, and more and more photorealistic simulation will be critical for efficient learning. In this research, we propose a novel game-based end-to-end learning and testing framework for autonomous vehicle highway driving, by learning from human driving skills. Firstly, we utilize the popular game Grand Theft Auto V (GTA V) to collect highway driving data with our proposed programmable labels. Then, an end-to-end architecture predicts the steering and throttle values that control the vehicle by the image of the game screen. The predicted control values are sent to the game via a virtual controller to keep the vehicle in lane and avoid collisions with other vehicles on the road. The proposed solution is validated in GTA V games, and the results demonstrate the effectiveness of this end-to-end gamification framework for learning human driving skills.
4/19/2024

GenAD: Generative End-to-End Autonomous Driving
Wenzhao Zheng, Ruiqi Song, Xianda Guo, Chenming Zhang, Long Chen
0
0
Directly producing planning results from raw sensors has been a long-desired solution for autonomous driving and has attracted increasing attention recently. Most existing end-to-end autonomous driving methods factorize this problem into perception, motion prediction, and planning. However, we argue that the conventional progressive pipeline still cannot comprehensively model the entire traffic evolution process, e.g., the future interaction between the ego car and other traffic participants and the structural trajectory prior. In this paper, we explore a new paradigm for end-to-end autonomous driving, where the key is to predict how the ego car and the surroundings evolve given past scenes. We propose GenAD, a generative framework that casts autonomous driving into a generative modeling problem. We propose an instance-centric scene tokenizer that first transforms the surrounding scenes into map-aware instance tokens. We then employ a variational autoencoder to learn the future trajectory distribution in a structural latent space for trajectory prior modeling. We further adopt a temporal model to capture the agent and ego movements in the latent space to generate more effective future trajectories. GenAD finally simultaneously performs motion prediction and planning by sampling distributions in the learned structural latent space conditioned on the instance tokens and using the learned temporal model to generate futures. Extensive experiments on the widely used nuScenes benchmark show that the proposed GenAD achieves state-of-the-art performance on vision-centric end-to-end autonomous driving with high efficiency. Code: https://github.com/wzzheng/GenAD.
4/9/2024