On the Federated Learning Framework for Cooperative Perception
2404.17147
0
0
📉
Abstract
Cooperative perception is essential to enhance the efficiency and safety of future transportation systems, requiring extensive data sharing among vehicles on the road, which raises significant privacy concerns. Federated learning offers a promising solution by enabling data privacy-preserving collaborative enhancements in perception, decision-making, and planning among connected and autonomous vehicles (CAVs). However, federated learning is impeded by significant challenges arising from data heterogeneity across diverse clients, potentially diminishing model accuracy and prolonging convergence periods. This study introduces a specialized federated learning framework for CP, termed the federated dynamic weighted aggregation (FedDWA) algorithm, facilitated by dynamic adjusting loss (DALoss) function. This framework employs dynamic client weighting to direct model convergence and integrates a novel loss function that utilizes Kullback-Leibler divergence (KLD) to counteract the detrimental effects of non-independently and identically distributed (Non-IID) and unbalanced data. Utilizing the BEV transformer as the primary model, our rigorous testing on the OpenV2V dataset, augmented with FedBEVT data, demonstrates significant improvements in the average intersection over union (IoU). These results highlight the substantial potential of our federated learning framework to address data heterogeneity challenges in CP, thereby enhancing the accuracy of environmental perception models and facilitating more robust and efficient collaborative learning solutions in the transportation sector.
Create account to get full access
Overview
- Cooperative perception is crucial for enhancing the efficiency and safety of future transportation systems
- Requires extensive data sharing among vehicles, which raises significant privacy concerns
- Federated learning offers a promising solution by enabling privacy-preserving collaborative enhancements in perception, decision-making, and planning for connected and autonomous vehicles (CAVs)
- However, federated learning faces challenges from data heterogeneity across clients, which can diminish model accuracy and prolong convergence
Plain English Explanation
Cooperative perception is the idea of vehicles on the road sharing information with each other to improve their understanding of the driving environment. This is important for making transportation systems more efficient and safer in the future. However, sharing all this data raises privacy concerns, as vehicles would be revealing information about their owners and surroundings.
Federated learning is a technique that allows vehicles to collaboratively improve their perception models without directly sharing their raw data. Instead, the vehicles each train a model on their local data and then share the model updates with a central server, which combines the updates to create an improved global model.
The challenge with federated learning is that the data each vehicle has access to can be quite different, due to factors like their location, driving habits, and sensors. This "data heterogeneity" can make it hard for the global model to converge to an accurate solution and can slow down the training process.
Technical Explanation
This study introduces a specialized federated learning framework for cooperative perception, called the federated dynamic weighted aggregation (FedDWA) algorithm. FedDWA uses a dynamic client weighting approach to guide the model convergence, and it integrates a novel loss function that utilizes Kullback-Leibler divergence (KLD) to counteract the negative effects of non-independently and identically distributed (Non-IID) and unbalanced data.
The primary model used in this framework is the BEV transformer, which is trained on the OpenV2V dataset augmented with FedBEVT data. The results demonstrate significant improvements in the average intersection over union (IoU) metric, which is a measure of the accuracy of the environmental perception model.
These findings highlight the potential of the FedDWA framework to address the data heterogeneity challenges in cooperative perception. By enhancing the accuracy of the environmental perception models, it can facilitate more robust and efficient collaborative learning solutions in the transportation sector.
Critical Analysis
The paper provides a promising approach to addressing the data heterogeneity challenges in federated learning for cooperative perception. However, the authors acknowledge that their framework may still be impacted by factors like the quality and quantity of data available to each client, as well as the degree of non-IID and unbalanced data.
Additionally, the study is limited to evaluating the framework on a specific dataset and model architecture. Further research would be needed to understand how well the FedDWA approach generalizes to other cooperative perception tasks and datasets.
It would also be valuable to explore the computational and communication overhead of the FedDWA framework, as the added complexity of the dynamic weighting and novel loss function may have implications for the scalability and practical deployment of the approach.
Conclusion
This study presents a promising federated learning framework, FedDWA, that leverages dynamic client weighting and a novel loss function to enhance the accuracy of environmental perception models in cooperative perception systems. By addressing the data heterogeneity challenges, the FedDWA framework has the potential to enable more robust and efficient collaborative learning solutions in the transportation sector, ultimately improving the safety and efficiency of future transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
Federated Learning Model Aggregation in Heterogenous Aerial and Space Networks
Fan Dong, Ali Abbasi, Steve Drew, Henry Leung, Xin Wang, Jiayu Zhou
0
0
Federated learning offers a promising approach under the constraints of networking and data privacy constraints in aerial and space networks (ASNs), utilizing large-scale private edge data from drones, balloons, and satellites. Existing research has extensively studied the optimization of the learning process, computing efficiency, and communication overhead. An important yet often overlooked aspect is that participants contribute predictive knowledge with varying diversity of knowledge, affecting the quality of the learned federated models. In this paper, we propose a novel approach to address this issue by introducing a Weighted Averaging and Client Selection (WeiAvgCS) framework that emphasizes updates from high-diversity clients and diminishes the influence of those from low-diversity clients. Direct sharing of the data distribution may be prohibitive due to the additional private information that is sent from the clients. As such, we introduce an estimation for the diversity using a projection-based method. Extensive experiments have been performed to show WeiAvgCS's effectiveness. WeiAvgCS could converge 46% faster on FashionMNIST and 38% faster on CIFAR10 than its benchmarks on average in our experiments.
4/11/2024
Decentralized Personalized Federated Learning
Salma Kharrat, Marco Canini, Samuel Horvath
0
0
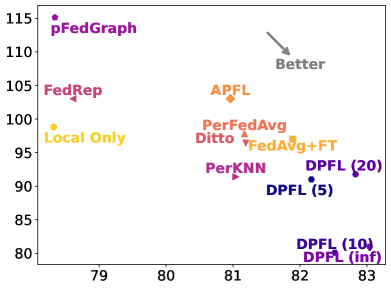
This work tackles the challenges of data heterogeneity and communication limitations in decentralized federated learning. We focus on creating a collaboration graph that guides each client in selecting suitable collaborators for training personalized models that leverage their local data effectively. Our approach addresses these issues through a novel, communication-efficient strategy that enhances resource efficiency. Unlike traditional methods, our formulation identifies collaborators at a granular level by considering combinatorial relations of clients, enhancing personalization while minimizing communication overhead. We achieve this through a bi-level optimization framework that employs a constrained greedy algorithm, resulting in a resource-efficient collaboration graph for personalized learning. Extensive evaluation against various baselines across diverse datasets demonstrates the superiority of our method, named DPFL. DPFL consistently outperforms other approaches, showcasing its effectiveness in handling real-world data heterogeneity, minimizing communication overhead, enhancing resource efficiency, and building personalized models in decentralized federated learning scenarios.
6/11/2024

Federated Learning with Heterogeneous Data Handling for Robust Vehicular Object Detection
Ahmad Khalil, Tizian Dege, Pegah Golchin, Rostyslav Olshevskyi, Antonio Fernandez Anta, Tobias Meuser
0
0
In the pursuit of refining precise perception models for fully autonomous driving, continual online model training becomes essential. Federated Learning (FL) within vehicular networks offers an efficient mechanism for model training while preserving raw sensory data integrity. Yet, FL struggles with non-identically distributed data (e.g., quantity skew), leading to suboptimal convergence rates during model training. In previous work, we introduced FedLA, an innovative Label-Aware aggregation method addressing data heterogeneity in FL for generic scenarios. In this paper, we introduce FedProx+LA, a novel FL method building upon the state-of-the-art FedProx and FedLA to tackle data heterogeneity, which is specifically tailored for vehicular networks. We evaluate the efficacy of FedProx+LA in continuous online object detection model training. Through a comparative analysis against conventional and state-of-the-art methods, our findings reveal the superior convergence rate of FedProx+LA. Notably, if the label distribution is very heterogeneous, our FedProx+LA approach shows substantial improvements in detection performance compared to baseline methods, also outperforming our previous FedLA approach. Moreover, both FedLA and FedProx+LA increase convergence speed by 30% compared to baseline methods.
5/3/2024

FedPylot: Navigating Federated Learning for Real-Time Object Detection in Internet of Vehicles
Cyprien Qu'em'eneur, Soumaya Cherkaoui
0
0
The Internet of Vehicles (IoV) emerges as a pivotal component for autonomous driving and intelligent transportation systems (ITS), by enabling low-latency big data processing in a dense interconnected network that comprises vehicles, infrastructures, pedestrians and the cloud. Autonomous vehicles are heavily reliant on machine learning (ML) and can strongly benefit from the wealth of sensory data generated at the edge, which calls for measures to reconcile model training with preserving the privacy of sensitive user data. Federated learning (FL) stands out as a promising solution to train sophisticated ML models in vehicular networks while protecting the privacy of road users and mitigating communication overhead. This paper examines the federated optimization of the cutting-edge YOLOv7 model to tackle real-time object detection amid data heterogeneity, encompassing unbalancedness, concept drift, and label distribution skews. To this end, we introduce FedPylot, a lightweight MPI-based prototype to simulate federated object detection experiments on high-performance computing (HPC) systems, where we safeguard server-client communications using hybrid encryption. Our study factors in accuracy, communication cost, and inference speed, thereby presenting a balanced approach to the challenges faced by autonomous vehicles. We demonstrate promising results for the applicability of FL in IoV and hope that FedPylot will provide a basis for future research into federated real-time object detection. The source code is available at https://github.com/cyprienquemeneur/fedpylot.
6/7/2024