Federated Multi-Agent Mapping for Planetary Exploration
2404.02289
0
0
Abstract
In multi-agent robotic exploration, managing and effectively utilizing the vast, heterogeneous data generated from dynamic environments poses a significant challenge. Federated learning (FL) is a promising approach for distributed mapping, addressing the challenges of decentralized data in collaborative learning. FL enables joint model training across multiple agents without requiring the centralization or sharing of raw data, overcoming bandwidth and storage constraints. Our approach leverages implicit neural mapping, representing maps as continuous functions learned by neural networks, for compact and adaptable representations. We further enhance this approach with meta-initialization on Earth datasets, pre-training the network to quickly learn new map structures. This combination demonstrates strong generalization to diverse domains like Martian terrain and glaciers. We rigorously evaluate this approach, demonstrating its effectiveness for real-world deployment in multi-agent exploration scenarios.
Create account to get full access
Overview
- Researchers developed a federated multi-agent mapping system for planetary exploration
- The system allows multiple robotic agents to collaboratively map an unknown environment
- Key contributions include a novel federated learning approach and techniques to handle communication disruptions
Plain English Explanation
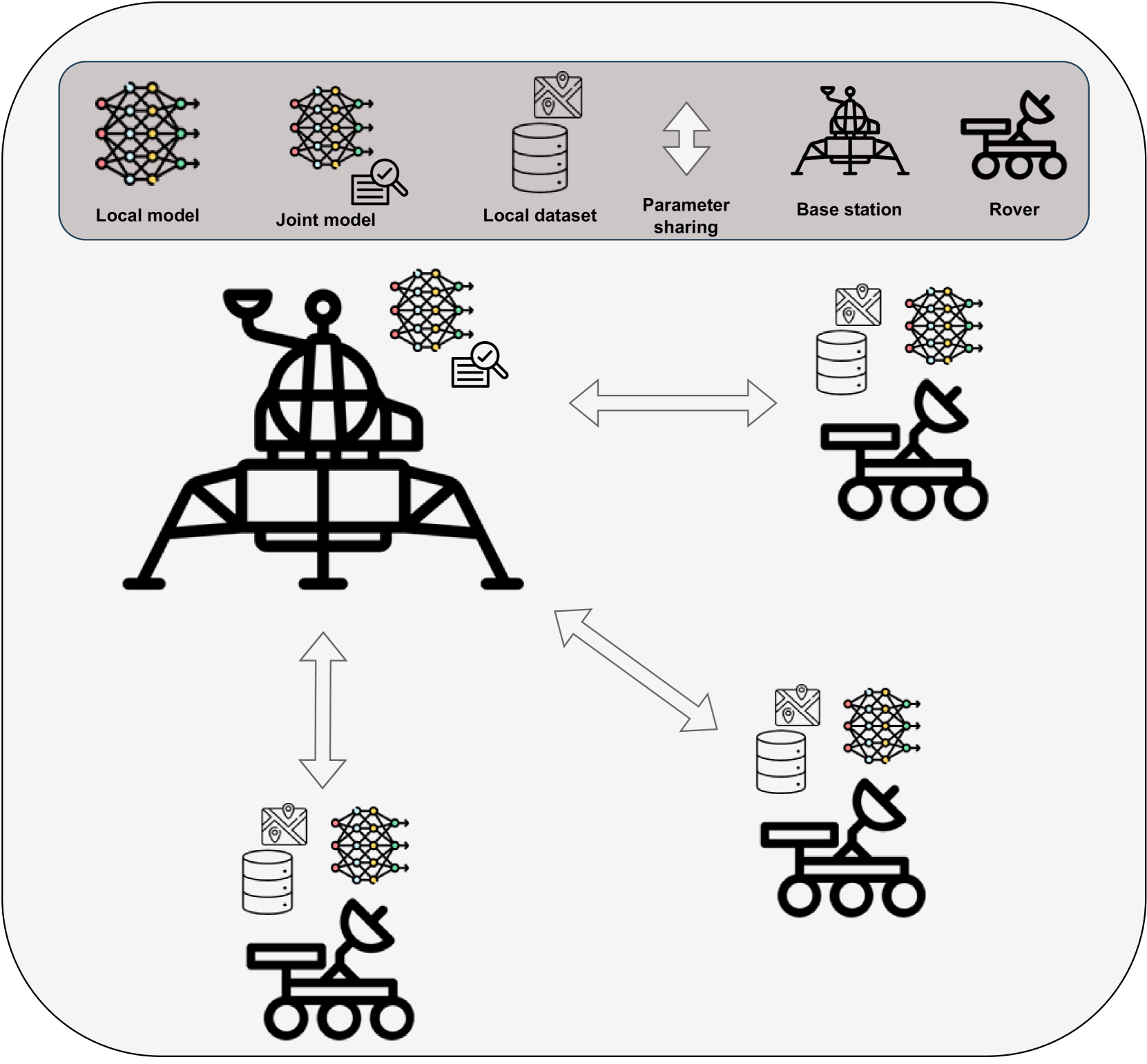
This research focuses on enabling robots to work together to map out an unexplored planetary environment. Imagine a team of robotic rovers exploring the surface of Mars or the Moon. Instead of each rover independently creating its own map, the researchers developed a way for the rovers to collectively build a shared map by communicating and coordinating with each other.
The core idea is a "federated learning" approach, which allows the robots to learn and update the map simultaneously without constantly sending all their data to a central server. Each robot maintains its own local map, and they periodically exchange updates to gradually refine the shared map. This federated approach is more efficient and resilient than a centralized system, especially when communication between the robots may be intermittent or delayed.
The researchers also incorporated techniques to handle disruptions in communication, ensuring the mapping process can continue even if robots temporarily lose contact with each other. This is crucial for real-world planetary exploration where connectivity can be unreliable.
Overall, this research advances the capability for teams of robots to collaboratively explore and map unknown environments, which has significant implications for future space missions and other applications requiring autonomous exploration.
Technical Explanation
The paper presents a federated multi-agent mapping system for planetary exploration. The key technical components include:
-
Federated learning framework: Each agent (robot) maintains a local map and periodically exchanges map updates with other agents. This allows the shared map to be refined collaboratively without the need for a central server to aggregate all data.
-
Communication-aware mapping: The system includes strategies to handle disruptions in communication between agents, such as delayed or lost updates. This ensures the mapping process can continue even with intermittent connectivity.
-
Exploration and exploitation: The agents balance exploring unknown areas and exploiting known parts of the environment to efficiently build the shared map.
The researchers evaluated the system through simulations of a Mars-like environment, demonstrating its ability to create accurate maps despite communication challenges. The federated approach was shown to outperform a centralized mapping system in terms of robustness and efficiency.
Critical Analysis
The paper provides a thorough technical exploration of the federated multi-agent mapping system, addressing key challenges like communication disruptions that are essential for real-world planetary exploration. However, the authors acknowledge several limitations and areas for further research:
- The simulations did not fully capture the complexities of actual planetary environments, such as varied terrain, unpredictable weather, and potential interference from external factors.
- The system was evaluated with a relatively small number of agents (up to 5), and the scalability to larger robot teams remains to be tested.
- The paper does not address potential issues around coordinating the agents' exploration strategies or resolving conflicts in the shared map.
Additionally, while the federated approach offers advantages in efficiency and robustness, there may be tradeoffs in terms of map accuracy or completeness compared to a centralized system with full data aggregation. Further research and real-world testing would be needed to fully understand the practical implications of this trade-off.
Conclusion
This research presents a promising federated multi-agent mapping system that enables teams of robots to collaboratively explore and map unknown planetary environments. By leveraging a decentralized, communication-aware approach, the system can effectively handle the challenges of intermittent connectivity that are common in remote exploration scenarios.
The technical advances demonstrated in this work, such as the federated learning framework and strategies for managing communication disruptions, represent an important step towards more autonomous and resilient robotic exploration. As space agencies and private companies continue to pursue ambitious planetary missions, this type of collaborative mapping capability could prove invaluable for efficiently surveying and understanding extraterrestrial environments.
While the current simulation-based evaluation provides a solid proof of concept, further real-world testing and refinement will be necessary to fully realize the potential of this technology. Nonetheless, this research contributes meaningful progress towards the goal of enabling autonomous, multi-agent exploration and mapping for future space exploration endeavors.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Decentralized Personalized Federated Learning
Salma Kharrat, Marco Canini, Samuel Horvath
0
0
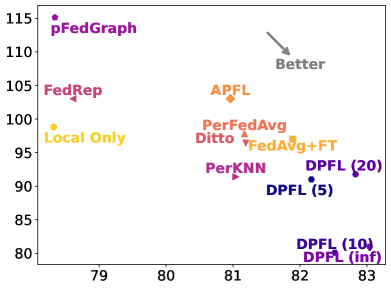
This work tackles the challenges of data heterogeneity and communication limitations in decentralized federated learning. We focus on creating a collaboration graph that guides each client in selecting suitable collaborators for training personalized models that leverage their local data effectively. Our approach addresses these issues through a novel, communication-efficient strategy that enhances resource efficiency. Unlike traditional methods, our formulation identifies collaborators at a granular level by considering combinatorial relations of clients, enhancing personalization while minimizing communication overhead. We achieve this through a bi-level optimization framework that employs a constrained greedy algorithm, resulting in a resource-efficient collaboration graph for personalized learning. Extensive evaluation against various baselines across diverse datasets demonstrates the superiority of our method, named DPFL. DPFL consistently outperforms other approaches, showcasing its effectiveness in handling real-world data heterogeneity, minimizing communication overhead, enhancing resource efficiency, and building personalized models in decentralized federated learning scenarios.
6/11/2024
Federated Learning: A Cutting-Edge Survey of the Latest Advancements and Applications
Azim Akhtarshenas, Mohammad Ali Vahedifar, Navid Ayoobi, Behrouz Maham, Tohid Alizadeh, Sina Ebrahimi, David L'opez-P'erez
0
0
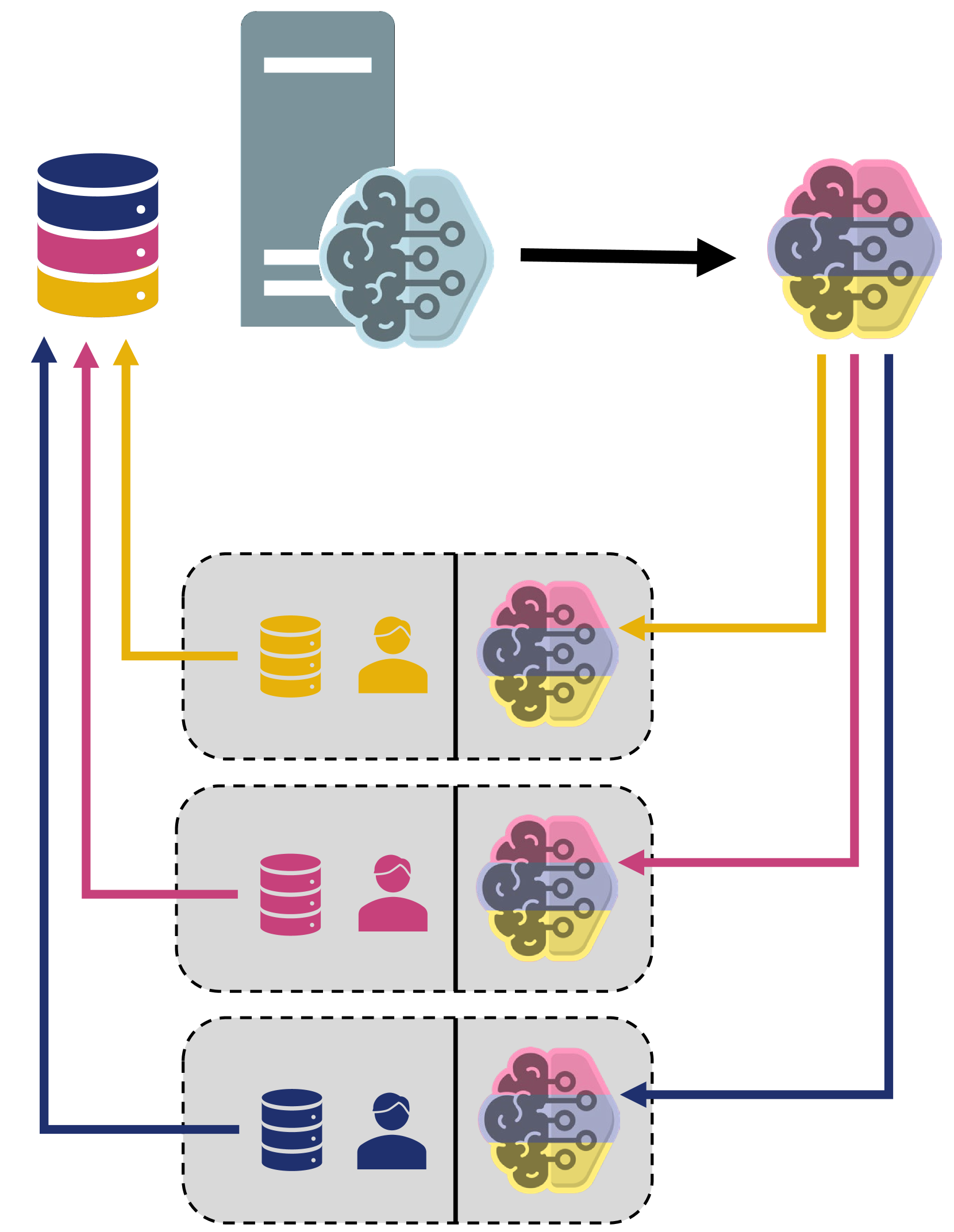
Robust machine learning (ML) models can be developed by leveraging large volumes of data and distributing the computational tasks across numerous devices or servers. Federated learning (FL) is a technique in the realm of ML that facilitates this goal by utilizing cloud infrastructure to enable collaborative model training among a network of decentralized devices. Beyond distributing the computational load, FL targets the resolution of privacy issues and the reduction of communication costs simultaneously. To protect user privacy, FL requires users to send model updates rather than transmitting large quantities of raw and potentially confidential data. Specifically, individuals train ML models locally using their own data and then upload the results in the form of weights and gradients to the cloud for aggregation into the global model. This strategy is also advantageous in environments with limited bandwidth or high communication costs, as it prevents the transmission of large data volumes. With the increasing volume of data and rising privacy concerns, alongside the emergence of large-scale ML models like Large Language Models (LLMs), FL presents itself as a timely and relevant solution. It is therefore essential to review current FL algorithms to guide future research that meets the rapidly evolving ML demands. This survey provides a comprehensive analysis and comparison of the most recent FL algorithms, evaluating them on various fronts including mathematical frameworks, privacy protection, resource allocation, and applications. Beyond summarizing existing FL methods, this survey identifies potential gaps, open areas, and future challenges based on the performance reports and algorithms used in recent studies. This survey enables researchers to readily identify existing limitations in the FL field for further exploration.
5/28/2024

Asynchronous Multi-Server Federated Learning for Geo-Distributed Clients
Yuncong Zuo, Bart Cox, Lydia Y. Chen, J'er'emie Decouchant
0
0
Federated learning (FL) systems enable multiple clients to train a machine learning model iteratively through synchronously exchanging the intermediate model weights with a single server. The scalability of such FL systems can be limited by two factors: server idle time due to synchronous communication and the risk of a single server becoming the bottleneck. In this paper, we propose a new FL architecture, to our knowledge, the first multi-server FL system that is entirely asynchronous, and therefore addresses these two limitations simultaneously. Our solution keeps both servers and clients continuously active. As in previous multi-server methods, clients interact solely with their nearest server, ensuring efficient update integration into the model. Differently, however, servers also periodically update each other asynchronously, and never postpone interactions with clients. We compare our solution to three representative baselines - FedAvg, FedAsync and HierFAVG - on the MNIST and CIFAR-10 image classification datasets and on the WikiText-2 language modeling dataset. Our solution converges to similar or higher accuracy levels than previous baselines and requires 61% less time to do so in geo-distributed settings.
6/21/2024

Fedstellar: A Platform for Decentralized Federated Learning
Enrique Tom'as Mart'inez Beltr'an, 'Angel Luis Perales G'omez, Chao Feng, Pedro Miguel S'anchez S'anchez, Sergio L'opez Bernal, G'er^ome Bovet, Manuel Gil P'erez, Gregorio Mart'inez P'erez, Alberto Huertas Celdr'an
0
0
In 2016, Google proposed Federated Learning (FL) as a novel paradigm to train Machine Learning (ML) models across the participants of a federation while preserving data privacy. Since its birth, Centralized FL (CFL) has been the most used approach, where a central entity aggregates participants' models to create a global one. However, CFL presents limitations such as communication bottlenecks, single point of failure, and reliance on a central server. Decentralized Federated Learning (DFL) addresses these issues by enabling decentralized model aggregation and minimizing dependency on a central entity. Despite these advances, current platforms training DFL models struggle with key issues such as managing heterogeneous federation network topologies. To overcome these challenges, this paper presents Fedstellar, a platform extended from p2pfl library and designed to train FL models in a decentralized, semi-decentralized, and centralized fashion across diverse federations of physical or virtualized devices. The Fedstellar implementation encompasses a web application with an interactive graphical interface, a controller for deploying federations of nodes using physical or virtual devices, and a core deployed on each device which provides the logic needed to train, aggregate, and communicate in the network. The effectiveness of the platform has been demonstrated in two scenarios: a physical deployment involving single-board devices such as Raspberry Pis for detecting cyberattacks, and a virtualized deployment comparing various FL approaches in a controlled environment using MNIST and CIFAR-10 datasets. In both scenarios, Fedstellar demonstrated consistent performance and adaptability, achieving F1 scores of 91%, 98%, and 91.2% using DFL for detecting cyberattacks and classifying MNIST and CIFAR-10, respectively, reducing training time by 32% compared to centralized approaches.
4/9/2024