On the Fly Robotic-Assisted Medical Instrument Planning and Execution Using Mixed Reality
2404.05887
0
0

Abstract
Robotic-assisted medical systems (RAMS) have gained significant attention for their advantages in alleviating surgeons' fatigue and improving patients' outcomes. These systems comprise a range of human-computer interactions, including medical scene monitoring, anatomical target planning, and robot manipulation. However, despite its versatility and effectiveness, RAMS demands expertise in robotics, leading to a high learning cost for the operator. In this work, we introduce a novel framework using mixed reality technologies to ease the use of RAMS. The proposed framework achieves real-time planning and execution of medical instruments by providing 3D anatomical image overlay, human-robot collision detection, and robot programming interface. These features, integrated with an easy-to-use calibration method for head-mounted display, improve the effectiveness of human-robot interactions. To assess the feasibility of the framework, two medical applications are presented in this work: 1) coil placement during transcranial magnetic stimulation and 2) drill and injector device positioning during femoroplasty. Results from these use cases demonstrate its potential to extend to a wider range of medical scenarios.
Create account to get full access
System Overview
The paper presents a mixed reality system for robotic-assisted medical instrument planning and execution. The system allows surgeons to visualize and interact with virtual models of medical instruments in a mixed reality environment, enabling them to plan and execute procedures more efficiently.
Plain English Explanation
The researchers developed a system that combines virtual reality (VR) and augmented reality (AR) to help surgeons plan and carry out medical procedures using robotic tools. The system lets surgeons see 3D models of the medical instruments overlaid on the real-world environment through a mixed reality headset. This allows them to plan out the procedure and practice using the virtual instruments before actually performing the surgery.
The key idea is to give surgeons more control and situational awareness when using robotic surgical tools. By letting them see the instruments in the context of the patient's anatomy, the system helps them better understand how the tools will interact with the body during the procedure. This can lead to more efficient and effective surgeries.
Technical Explanation
The system consists of several key components:
- A mixed reality headset that displays virtual 3D models of medical instruments overlaid on the real-world environment
- Robotic arms that can manipulate the physical medical instruments based on the surgeon's interactions in the mixed reality environment
- Algorithms for real-time pose estimation and registration of the virtual instruments with the physical patient anatomy
- An intuitive user interface that allows the surgeon to plan the procedure and control the robotic arms through natural hand gestures and voice commands
The core innovation is the tight integration between the virtual and physical worlds, enabling "on the fly" planning and execution of surgical tasks. The surgeon can instantly see the impact of instrument positioning and movements within the mixed reality view, and seamlessly translate those plans to the robotic arms to carry out the procedure.
Critical Analysis
The paper provides a compelling proof-of-concept for using mixed reality technology to enhance robotic-assisted surgery. The ability to visualize and interact with virtual surgical instruments in the context of the patient's anatomy is a significant advancement over traditional approaches.
However, the authors acknowledge several limitations and areas for future work. The current system is limited to relatively simple surgical tasks, and more research is needed to scale it to complex, multi-instrument procedures. There are also technical challenges around accurate real-time tracking and registration of the virtual and physical elements.
Additionally, the paper does not deeply explore the human factors implications of this technology. Further user studies are needed to understand how surgeons adapt to the mixed reality workflow and the impact on their cognitive load, situational awareness, and overall surgical performance.
Conclusion
Overall, the proposed mixed reality system represents an exciting step forward in enabling more intuitive and effective robotic-assisted surgical interventions. By bridging the gap between virtual planning and physical execution, it has the potential to improve surgical outcomes and efficiency. Continued research and development in this area could lead to transformative advancements in computer-assisted surgery.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛠️
Semi-autonomous Robotic Disassembly Enhanced by Mixed Reality
Alireza Rastegarpanah, Cesar Alan Contreras, Rustam Stolkin
0
0
In this study, we introduce SARDiM, a modular semi-autonomous platform enhanced with mixed reality for industrial disassembly tasks. Through a case study focused on EV battery disassembly, SARDiM integrates Mixed Reality, object segmentation, teleoperation, force feedback, and variable autonomy. Utilising the ROS, Unity, and MATLAB platforms, alongside a joint impedance controller, SARDiM facilitates teleoperated disassembly. The approach combines FastSAM for real-time object segmentation, generating data which is subsequently processed through a cluster analysis algorithm to determine the centroid and orientation of the components, categorizing them by size and disassembly priority. This data guides the MoveIt platform in trajectory planning for the Franka Robot arm. SARDiM provides the capability to switch between two teleoperation modes: manual and semi-autonomous with variable autonomy. Each was evaluated using four different Interface Methods (IM): direct view, monitor feed, mixed reality with monitor feed, and point cloud mixed reality. Evaluations across the eight IMs demonstrated a 40.61% decrease in joint limit violations using Mode 2. Moreover, Mode 2-IM4 outperformed Mode 1-IM1 by achieving a 2.33%-time reduction while considerably increasing safety, making it optimal for operating in hazardous environments at a safe distance, with the same ease of use as teleoperation with a direct view of the environment.
5/7/2024
⛏️
Spatial Assisted Human-Drone Collaborative Navigation and Interaction through Immersive Mixed Reality
Luca Morando, Giuseppe Loianno
0
0
Aerial robots have the potential to play a crucial role in assisting humans with complex and dangerous tasks. Nevertheless, the future industry demands innovative solutions to streamline the interaction process between humans and drones to enable seamless collaboration and efficient co-working. In this paper, we present a novel tele-immersive framework that promotes cognitive and physical collaboration between humans and robots through Mixed Reality (MR). This framework incorporates a novel bi-directional spatial awareness and a multi-modal virtual-physical interaction approaches. The former seamlessly integrates the physical and virtual worlds, offering bidirectional egocentric and exocentric environmental representations. The latter, leveraging the proposed spatial representation, further enhances the collaboration combining a robot planning algorithm for obstacle avoidance with a variable admittance control. This allows users to issue commands based on virtual forces while maintaining compatibility with the environment map. We validate the proposed approach by performing several collaborative planning and exploration tasks involving a drone and an user equipped with a MR headset.
4/9/2024
Visual Attention Based Cognitive Human-Robot Collaboration for Pedicle Screw Placement in Robot-Assisted Orthopedic Surgery
Chen Chen, Qikai Zou, Yuhang Song, Shiji Song, Xiang Li
0
0
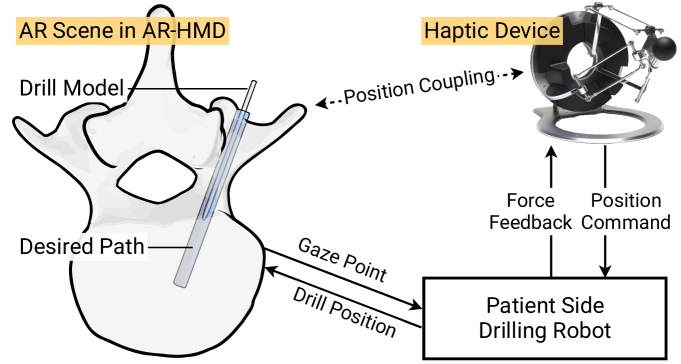
Current orthopedic robotic systems largely focus on navigation, aiding surgeons in positioning a guiding tube but still requiring manual drilling and screw placement. The automation of this task not only demands high precision and safety due to the intricate physical interactions between the surgical tool and bone but also poses significant risks when executed without adequate human oversight. As it involves continuous physical interaction, the robot should collaborate with the surgeon, understand the human intent, and always include the surgeon in the loop. To achieve this, this paper proposes a new cognitive human-robot collaboration framework, including the intuitive AR-haptic human-robot interface, the visual-attention-based surgeon model, and the shared interaction control scheme for the robot. User studies on a robotic platform for orthopedic surgery are presented to illustrate the performance of the proposed method. The results demonstrate that the proposed human-robot collaboration framework outperforms full robot and full human control in terms of safety and ergonomics.
5/16/2024

Transforming Surgical Interventions with Embodied Intelligence for Ultrasound Robotics
Huan Xu, Jinlin Wu, Guanglin Cao, Zhen Chen, Zhen Lei, Hongbin Liu
0
0
Ultrasonography has revolutionized non-invasive diagnostic methodologies, significantly enhancing patient outcomes across various medical domains. Despite its advancements, integrating ultrasound technology with robotic systems for automated scans presents challenges, including limited command understanding and dynamic execution capabilities. To address these challenges, this paper introduces a novel Ultrasound Embodied Intelligence system that synergistically combines ultrasound robots with large language models (LLMs) and domain-specific knowledge augmentation, enhancing ultrasound robots' intelligence and operational efficiency. Our approach employs a dual strategy: firstly, integrating LLMs with ultrasound robots to interpret doctors' verbal instructions into precise motion planning through a comprehensive understanding of ultrasound domain knowledge, including APIs and operational manuals; secondly, incorporating a dynamic execution mechanism, allowing for real-time adjustments to scanning plans based on patient movements or procedural errors. We demonstrate the effectiveness of our system through extensive experiments, including ablation studies and comparisons across various models, showcasing significant improvements in executing medical procedures from verbal commands. Our findings suggest that the proposed system improves the efficiency and quality of ultrasound scans and paves the way for further advancements in autonomous medical scanning technologies, with the potential to transform non-invasive diagnostics and streamline medical workflows.
6/19/2024