A Generic Trajectory Planning Method for Constrained All-Wheel-Steering Robots

0
Sign in to get full access
Overview
- This paper presents a generic trajectory planning method for constrained all-wheel-steering robots.
- The proposed approach can handle various constraints, such as kinematic, dynamic, and obstacle avoidance constraints, to generate feasible trajectories.
- The method is designed to be applicable to a wide range of all-wheel-steering robot platforms, making it a versatile solution for robotic navigation tasks.
Plain English Explanation
The paper describes a new way to plan the movement of robots that can steer all of their wheels. These robots are called "all-wheel-steering robots." The new method can handle different types of constraints, like the physical limits of the robot's movement and the need to avoid obstacles. This makes it a flexible solution that can be used with many different kinds of all-wheel-steering robots for navigating through various environments.
Technical Explanation
The paper introduces a generic trajectory planning method for constrained all-wheel-steering robots. The proposed approach can handle kinematic, dynamic, and obstacle avoidance constraints to generate feasible trajectories. The method is designed to be applicable to a wide range of all-wheel-steering robot platforms, making it a versatile solution for robotic navigation tasks.
The authors formulate the trajectory planning problem as a nonlinear optimization problem and solve it using a sequential quadratic programming (SQP) algorithm. The objective function minimizes a combination of the trajectory length and control effort, while satisfying the various constraints. The method can handle both holonomic and nonholonomic robot models, as well as obstacles represented as polygons.
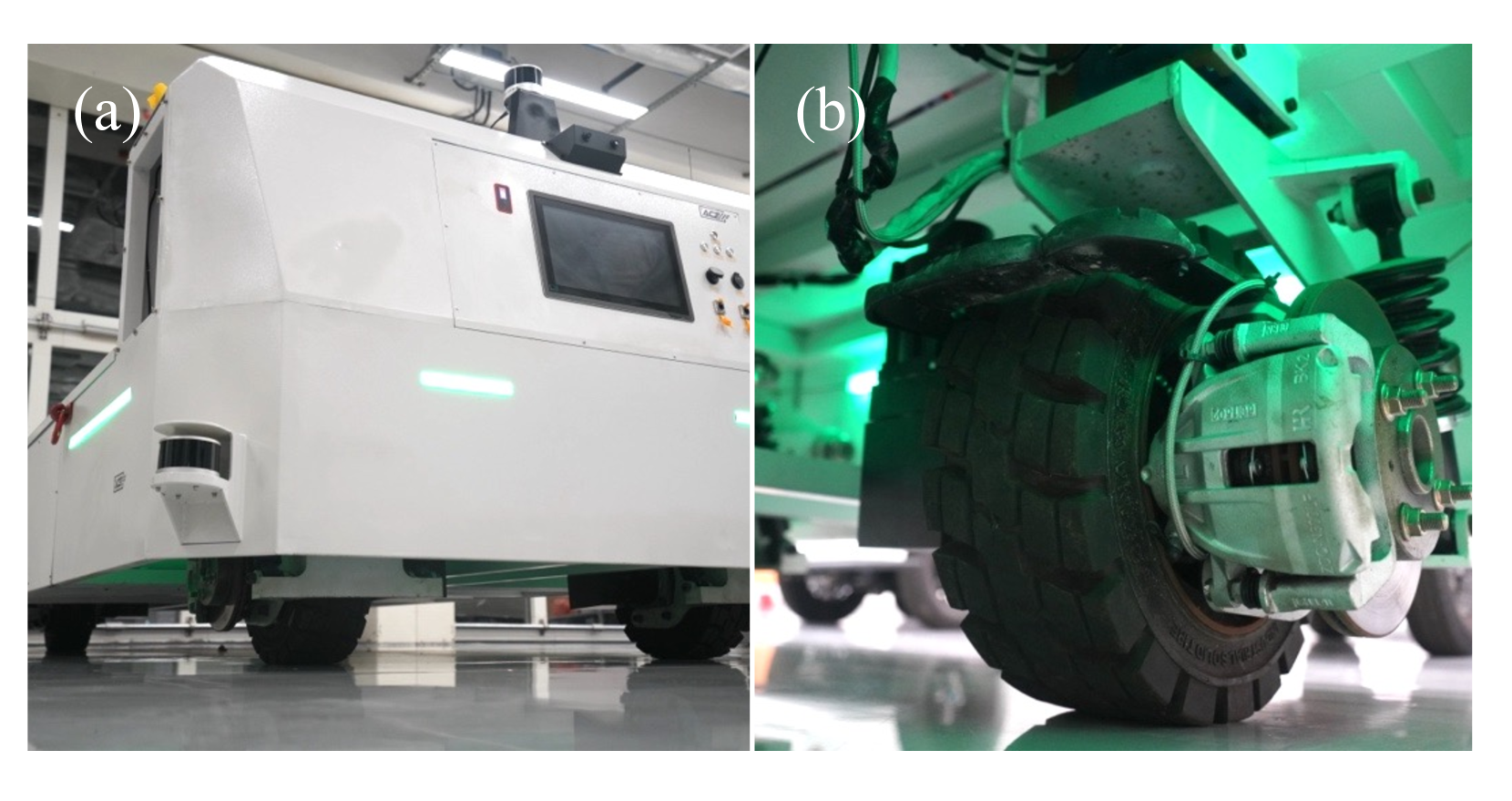
The authors validate their approach through simulations and experiments on a custom-built all-wheel-steering robot platform. The results demonstrate the ability of the proposed method to generate smooth and collision-free trajectories while satisfying the robot's kinematic and dynamic constraints.
Critical Analysis
The paper presents a comprehensive and well-designed trajectory planning method for all-wheel-steering robots. The authors have considered various practical constraints and developed a generic approach that can be applied to a wide range of robot platforms.
One potential limitation of the study is the lack of real-world experiments with more complex environments and obstacles. While the simulations and experiments on the custom-built robot platform are valuable, testing the method in more challenging scenarios would further demonstrate its robustness and applicability.
Additionally, the authors could have explored the computational efficiency of their SQP-based optimization approach, as real-time trajectory planning is often a critical requirement for autonomous robotic systems. Comparing the performance of their method with other optimization techniques or incorporating additional techniques to improve computational speed could be an area for further research.
Conclusion
This paper introduces a generic trajectory planning method for constrained all-wheel-steering robots. The proposed approach can handle various constraints, including kinematic, dynamic, and obstacle avoidance, to generate feasible trajectories. The versatility of the method, which can be applied to a wide range of all-wheel-steering robot platforms, makes it a valuable contribution to the field of autonomous robotic navigation. The authors have demonstrated the effectiveness of their approach through simulations and experiments, laying the groundwork for further research and real-world applications of this trajectory planning technique.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!