HGS-Mapping: Online Dense Mapping Using Hybrid Gaussian Representation in Urban Scenes
2403.20159
0
0

Abstract
Online dense mapping of urban scenes forms a fundamental cornerstone for scene understanding and navigation of autonomous vehicles. Recent advancements in mapping methods are mainly based on NeRF, whose rendering speed is too slow to meet online requirements. 3D Gaussian Splatting (3DGS), with its rendering speed hundreds of times faster than NeRF, holds greater potential in online dense mapping. However, integrating 3DGS into a street-view dense mapping framework still faces two challenges, including incomplete reconstruction due to the absence of geometric information beyond the LiDAR coverage area and extensive computation for reconstruction in large urban scenes. To this end, we propose HGS-Mapping, an online dense mapping framework in unbounded large-scale scenes. To attain complete construction, our framework introduces Hybrid Gaussian Representation, which models different parts of the entire scene using Gaussians with distinct properties. Furthermore, we employ a hybrid Gaussian initialization mechanism and an adaptive update method to achieve high-fidelity and rapid reconstruction. To the best of our knowledge, we are the first to integrate Gaussian representation into online dense mapping of urban scenes. Our approach achieves SOTA reconstruction accuracy while only employing 66% number of Gaussians, leading to 20% faster reconstruction speed.
Create account to get full access
Overview
- This paper presents a novel online dense mapping approach called HGS-Mapping that uses a hybrid Gaussian representation to efficiently build and maintain a detailed 3D map of urban environments.
- The method combines the strengths of Gaussian splatting and hash grid-assisted context to enable real-time, high-quality 3D reconstruction from RGB-D data.
- The proposed technique can handle challenging urban scenes with dynamic objects and occlusions, making it suitable for autonomous driving and robotics applications.
Plain English Explanation
The research paper describes a new way to create detailed 3D maps of urban environments in real-time using data from RGB-D cameras. The key innovation is the use of a "hybrid Gaussian representation" - a combination of two previous techniques called Gaussian splatting and hash grid-assisted context.
Gaussian splatting is a method for efficiently representing 3D surfaces using Gaussian functions rather than individual points or polygons. This allows for smoother, more natural-looking reconstructions. Hash grid-assisted context helps the system understand the surrounding environment by maintaining a 3D grid of information about the scene.
By bringing these two approaches together, the researchers developed a mapping system called HGS-Mapping that can build high-quality 3D models of complex urban areas with things like moving objects and obstructions. This makes it useful for tasks like autonomous driving, where robots and self-driving cars need to quickly understand their 3D surroundings.
The key advantage of HGS-Mapping is that it can create these detailed maps in real-time, as the camera is moving, rather than requiring a lengthy offline processing step. This allows for more responsive and adaptive behavior in autonomous systems.
Technical Explanation
The HGS-Mapping approach uses a hybrid representation that combines Gaussian splatting and hash grid-assisted context to enable online, high-quality 3D reconstruction from RGB-D data.
In the Gaussian splatting component, 3D points are represented as Gaussian functions rather than discrete points. This allows for smooth, continuous surfaces that can better handle noise and occlusions. The hash grid-assisted context module maintains a sparse 3D grid structure to efficiently store and query information about the surrounding environment.
By integrating these two techniques, HGS-Mapping can build and update a detailed 3D map of the environment in real-time. The Gaussian splatting provides a high-fidelity surface representation, while the hash grid stores contextual information to handle dynamic scenes with moving objects and occlusions.
The system operates in an online fashion, continuously integrating new RGB-D frames to incrementally update the 3D map. This allows it to be used for tasks like autonomous navigation, where the robot or vehicle needs to quickly understand and respond to its surroundings.
Critical Analysis
The paper provides a thorough evaluation of the HGS-Mapping approach, demonstrating its advantages over previous state-of-the-art methods in terms of accuracy, efficiency, and robustness to challenging urban scenes.
One potential limitation noted in the paper is the reliance on GPU acceleration, which may limit deployment on resource-constrained platforms. The authors suggest that future work could explore CPU-based optimizations to address this.
Additionally, the paper focuses on offline evaluation using benchmark datasets. While the results are promising, further real-world testing in diverse autonomous driving or robotics scenarios would be valuable to fully assess the system's capabilities and limitations.
Another area for further research could be exploring ways to integrate semantic understanding of the environment, beyond just the geometric reconstruction. This could enhance the system's ability to reason about and interact with its surroundings.
Overall, the HGS-Mapping approach represents an interesting and practical solution for online, high-quality 3D mapping that could have significant impact on autonomous systems operating in complex urban environments.
Conclusion
The HGS-Mapping system presented in this paper offers a novel approach to real-time, dense 3D mapping that combines the strengths of Gaussian splatting and hash grid-assisted context. By integrating these two techniques, the method can build detailed, high-fidelity 3D models of urban scenes, even in the presence of dynamic objects and occlusions.
The online, incremental nature of HGS-Mapping makes it well-suited for autonomous driving, robotics, and other applications where a system needs to quickly understand and respond to its 3D surroundings. While the current implementation relies on GPU acceleration, future work exploring CPU-based optimizations could expand its deployment possibilities.
Overall, this research represents an important contribution to the field of 3D mapping and reconstruction, with the potential to enable more robust and responsive autonomous systems operating in complex real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛠️
HO-Gaussian: Hybrid Optimization of 3D Gaussian Splatting for Urban Scenes
Zhuopeng Li, Yilin Zhang, Chenming Wu, Jianke Zhu, Liangjun Zhang
0
0
The rapid growth of 3D Gaussian Splatting (3DGS) has revolutionized neural rendering, enabling real-time production of high-quality renderings. However, the previous 3DGS-based methods have limitations in urban scenes due to reliance on initial Structure-from-Motion(SfM) points and difficulties in rendering distant, sky and low-texture areas. To overcome these challenges, we propose a hybrid optimization method named HO-Gaussian, which combines a grid-based volume with the 3DGS pipeline. HO-Gaussian eliminates the dependency on SfM point initialization, allowing for rendering of urban scenes, and incorporates the Point Densitification to enhance rendering quality in problematic regions during training. Furthermore, we introduce Gaussian Direction Encoding as an alternative for spherical harmonics in the rendering pipeline, which enables view-dependent color representation. To account for multi-camera systems, we introduce neural warping to enhance object consistency across different cameras. Experimental results on widely used autonomous driving datasets demonstrate that HO-Gaussian achieves photo-realistic rendering in real-time on multi-camera urban datasets.
4/1/2024
🗣️
GS-SLAM: Dense Visual SLAM with 3D Gaussian Splatting
Chi Yan, Delin Qu, Dan Xu, Bin Zhao, Zhigang Wang, Dong Wang, Xuelong Li
0
0
In this paper, we introduce textbf{GS-SLAM} that first utilizes 3D Gaussian representation in the Simultaneous Localization and Mapping (SLAM) system. It facilitates a better balance between efficiency and accuracy. Compared to recent SLAM methods employing neural implicit representations, our method utilizes a real-time differentiable splatting rendering pipeline that offers significant speedup to map optimization and RGB-D rendering. Specifically, we propose an adaptive expansion strategy that adds new or deletes noisy 3D Gaussians in order to efficiently reconstruct new observed scene geometry and improve the mapping of previously observed areas. This strategy is essential to extend 3D Gaussian representation to reconstruct the whole scene rather than synthesize a static object in existing methods. Moreover, in the pose tracking process, an effective coarse-to-fine technique is designed to select reliable 3D Gaussian representations to optimize camera pose, resulting in runtime reduction and robust estimation. Our method achieves competitive performance compared with existing state-of-the-art real-time methods on the Replica, TUM-RGBD datasets. Project page: https://gs-slam.github.io/.
4/9/2024
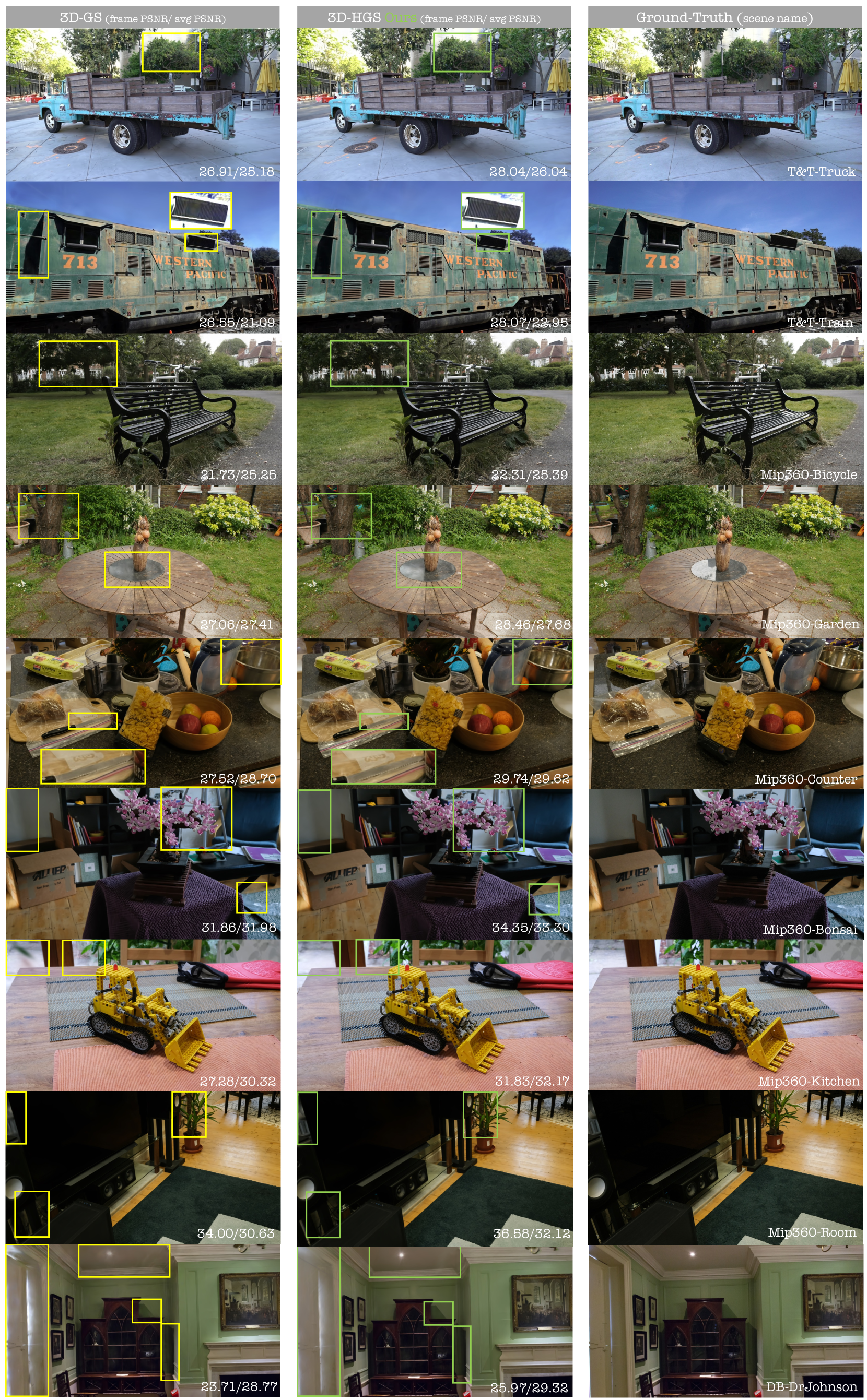
3D-HGS: 3D Half-Gaussian Splatting
Haolin Li, Jinyang Liu, Mario Sznaier, Octavia Camps
0
0
Photo-realistic 3D Reconstruction is a fundamental problem in 3D computer vision. This domain has seen considerable advancements owing to the advent of recent neural rendering techniques. These techniques predominantly aim to focus on learning volumetric representations of 3D scenes and refining these representations via loss functions derived from rendering. Among these, 3D Gaussian Splatting (3D-GS) has emerged as a significant method, surpassing Neural Radiance Fields (NeRFs). 3D-GS uses parameterized 3D Gaussians for modeling both spatial locations and color information, combined with a tile-based fast rendering technique. Despite its superior rendering performance and speed, the use of 3D Gaussian kernels has inherent limitations in accurately representing discontinuous functions, notably at edges and corners for shape discontinuities, and across varying textures for color discontinuities. To address this problem, we propose to employ 3D Half-Gaussian (3D-HGS) kernels, which can be used as a plug-and-play kernel. Our experiments demonstrate their capability to improve the performance of current 3D-GS related methods and achieve state-of-the-art rendering performance on various datasets without compromising rendering speed.
6/17/2024
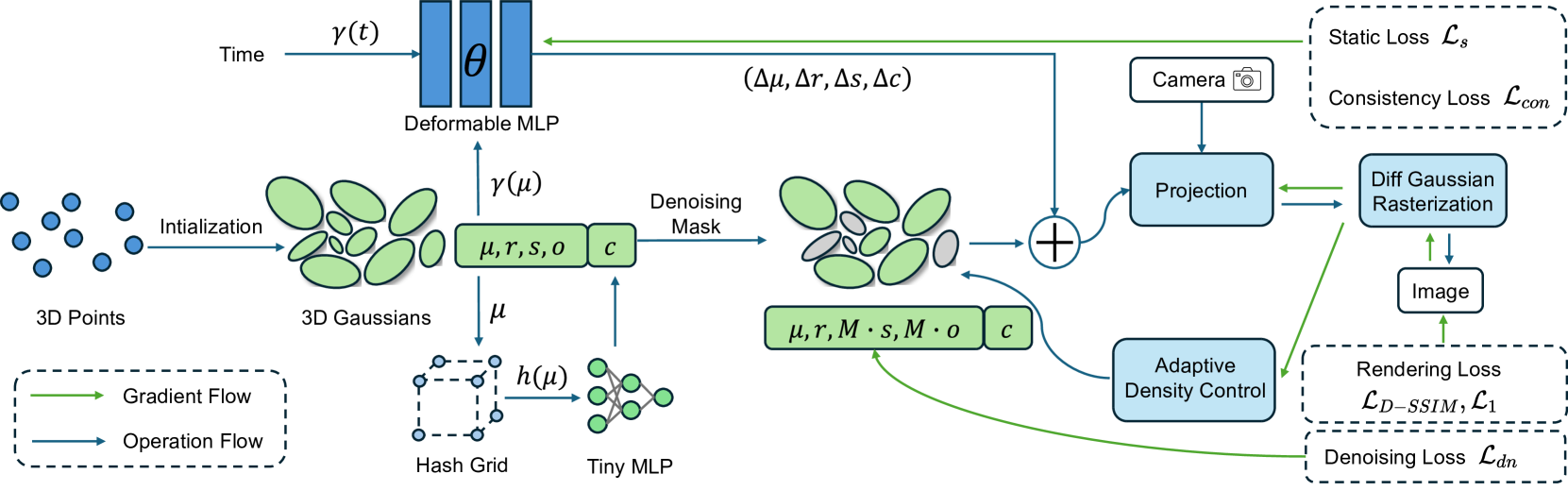
A Refined 3D Gaussian Representation for High-Quality Dynamic Scene Reconstruction
Bin Zhang, Bi Zeng, Zexin Peng
0
0
In recent years, Neural Radiance Fields (NeRF) has revolutionized three-dimensional (3D) reconstruction with its implicit representation. Building upon NeRF, 3D Gaussian Splatting (3D-GS) has departed from the implicit representation of neural networks and instead directly represents scenes as point clouds with Gaussian-shaped distributions. While this shift has notably elevated the rendering quality and speed of radiance fields but inevitably led to a significant increase in memory usage. Additionally, effectively rendering dynamic scenes in 3D-GS has emerged as a pressing challenge. To address these concerns, this paper purposes a refined 3D Gaussian representation for high-quality dynamic scene reconstruction. Firstly, we use a deformable multi-layer perceptron (MLP) network to capture the dynamic offset of Gaussian points and express the color features of points through hash encoding and a tiny MLP to reduce storage requirements. Subsequently, we introduce a learnable denoising mask coupled with denoising loss to eliminate noise points from the scene, thereby further compressing 3D Gaussian model. Finally, motion noise of points is mitigated through static constraints and motion consistency constraints. Experimental results demonstrate that our method surpasses existing approaches in rendering quality and speed, while significantly reducing the memory usage associated with 3D-GS, making it highly suitable for various tasks such as novel view synthesis, and dynamic mapping.
5/29/2024