Hierarchical Reinforcement Learning Empowered Task Offloading in V2I Networks
2405.11352
0
0

Abstract
Edge computing plays an essential role in the vehicle-to-infrastructure (V2I) networks, where vehicles offload their intensive computation tasks to the road-side units for saving energy and reduce the latency. This paper designs the optimal task offloading policy to address the concerns involving processing delay, energy consumption and edge computing cost. Each computation task consisting of some interdependent sub-tasks is characterized as a directed acyclic graph (DAG). In such dynamic networks, a novel hierarchical Offloading scheme is proposed by leveraging deep reinforcement learning (DRL). The inter-dependencies among the DAGs of the computation tasks are extracted using a graph neural network with attention mechanism. A parameterized DRL algorithm is developed to deal with the hierarchical action space containing both discrete and continuous actions. Simulation results with a real-world car speed dataset demonstrate that the proposed scheme can effectively reduce the system overhead.
Create account to get full access
Overview
- This research paper explores a hierarchical reinforcement learning-based approach to task offloading in vehicle-to-infrastructure (V2I) networks.
- The goal is to optimize the allocation of computational tasks between vehicles and edge servers to improve overall system performance.
- The authors propose a multi-agent reinforcement learning framework that allows vehicles and edge servers to learn optimal offloading policies through interaction with the environment.
Plain English Explanation
In today's world, many vehicles are equipped with powerful computing capabilities that can be used to process various tasks and applications. However, there are limits to the computational power and battery life of these on-board systems. To address this, researchers have been exploring the concept of computation offloading, where vehicles can offload some of their computational workload to nearby edge servers or cloud infrastructure.
This paper presents a novel hierarchical reinforcement learning approach to tackle the task offloading problem in vehicle-to-infrastructure (V2I) networks. The key idea is to allow both vehicles and edge servers to learn optimal offloading policies through a process of trial and error, without the need for detailed prior knowledge about the system.
The authors use a multi-agent reinforcement learning framework, where each vehicle and edge server acts as an independent agent trying to maximize its own performance. By learning from the outcomes of their actions, the agents gradually develop effective strategies for deciding when and where to offload computational tasks.
This approach is particularly useful in dynamic, complex environments like V2I networks, where the conditions are constantly changing (e.g., vehicle mobility, network congestion, edge server workload). The hierarchical structure of the learning process allows the system to adapt to these changes at multiple levels, from low-level task scheduling to high-level offloading decisions.
Technical Explanation
The proposed framework consists of two key components: a high-level offloading policy and a low-level task scheduling policy. The high-level offloading policy determines whether a computational task should be processed locally on the vehicle or offloaded to an edge server. The low-level task scheduling policy then decides the optimal allocation of tasks to the available edge servers.
Both the offloading and scheduling policies are learned using a multi-agent reinforcement learning approach. Each vehicle and edge server is modeled as an independent agent that interacts with the environment and receives rewards based on its performance. The agents use this feedback to gradually update their policies and learn the optimal strategies.
The authors design a hierarchical reward function that incentivizes the agents to consider both short-term and long-term objectives. For example, the low-level task scheduling policy is rewarded for minimizing the task completion time, while the high-level offloading policy is rewarded for maximizing the overall system-level performance.
To validate their approach, the researchers conduct extensive simulations using realistic V2I network scenarios. They compare the performance of their hierarchical reinforcement learning-based system with several baseline approaches, including traditional centralized optimization and decentralized greedy algorithms.
The results demonstrate that the proposed framework outperforms the baselines in terms of various metrics, such as task completion time, energy consumption, and resource utilization. The authors also analyze the convergence behavior of the learning process and the impact of different system parameters on the overall performance.
Critical Analysis
The research presented in this paper addresses an important problem in the context of vehicle-to-infrastructure (V2I) networks. The authors' use of a hierarchical reinforcement learning approach is a novel and promising solution that can adapt to the dynamic and complex nature of these environments.
One key strength of the proposed framework is its ability to learn optimal offloading and scheduling policies without requiring detailed prior knowledge about the system. This makes it more scalable and applicable to real-world scenarios, where the network conditions and computational demands can vary significantly.
However, the paper does not address some potential limitations and areas for further research. For example, the authors assume that the communication links between vehicles and edge servers are reliable and have sufficient bandwidth. In practice, network congestion and intermittent connectivity could pose challenges that the system would need to address.
Additionally, the authors do not consider the potential multi-objective optimization aspects of the problem, such as balancing task completion time, energy consumption, and resource utilization. Incorporating these trade-offs into the learning process could lead to more comprehensive and robust offloading strategies.
Furthermore, the paper does not provide a detailed analysis of the computational complexity and scalability of the proposed approach as the number of vehicles and edge servers increases. Understanding these aspects would be important for assessing the practical feasibility of the solution in large-scale V2I networks.
Conclusion
This research paper presents a novel hierarchical reinforcement learning-based approach to task offloading in vehicle-to-infrastructure (V2I) networks. By modeling the problem as a multi-agent reinforcement learning task, the authors develop a framework that allows vehicles and edge servers to learn optimal offloading and scheduling policies through interaction with the environment.
The results demonstrate the effectiveness of the proposed solution in terms of improved task completion time, energy consumption, and resource utilization compared to traditional approaches. This work contributes to the growing body of research on computation offloading and multi-agent reinforcement learning in the context of vehicle-to-infrastructure (V2I) networks.
As the demand for computational resources in vehicles continues to grow, the proposed hierarchical reinforcement learning-based approach could play a crucial role in optimizing the allocation of these resources and improving the overall performance of V2I systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
DNN Partitioning, Task Offloading, and Resource Allocation in Dynamic Vehicular Networks: A Lyapunov-Guided Diffusion-Based Reinforcement Learning Approach
Zhang Liu, Hongyang Du, Junzhe Lin, Zhibin Gao, Lianfen Huang, Seyyedali Hosseinalipour, Dusit Niyato
0
0
The rapid advancement of Artificial Intelligence (AI) has introduced Deep Neural Network (DNN)-based tasks to the ecosystem of vehicular networks. These tasks are often computation-intensive, requiring substantial computation resources, which are beyond the capability of a single vehicle. To address this challenge, Vehicular Edge Computing (VEC) has emerged as a solution, offering computing services for DNN-based tasks through resource pooling via Vehicle-to-Vehicle/Infrastructure (V2V/V2I) communications. In this paper, we formulate the problem of joint DNN partitioning, task offloading, and resource allocation in VEC as a dynamic long-term optimization. Our objective is to minimize the DNN-based task completion time while guaranteeing the system stability over time. To this end, we first leverage a Lyapunov optimization technique to decouple the original long-term optimization with stability constraints into a per-slot deterministic problem. Afterwards, we propose a Multi-Agent Diffusion-based Deep Reinforcement Learning (MAD2RL) algorithm, incorporating the innovative use of diffusion models to determine the optimal DNN partitioning and task offloading decisions. Furthermore, we integrate convex optimization techniques into MAD2RL as a subroutine to allocate computation resources, enhancing the learning efficiency. Through simulations under real-world movement traces of vehicles, we demonstrate the superior performance of our proposed algorithm compared to existing benchmark solutions.
6/12/2024
Computation Offloading for Multi-server Multi-access Edge Vehicular Networks: A DDQN-based Method
Siyu Wang, Bo Yang, Zhiwen Yu, Xuelin Cao, Yan Zhang, Chau Yuen
0
0
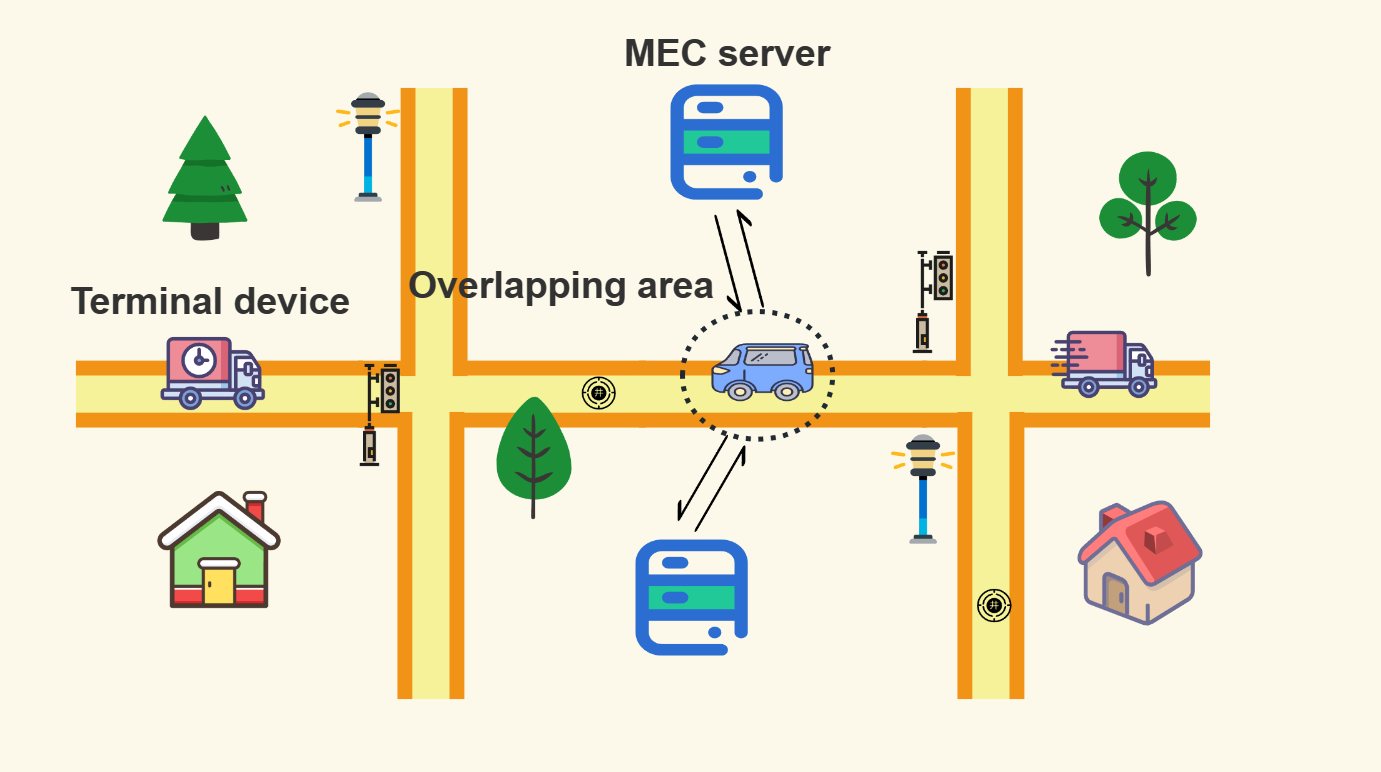
In this paper, we investigate a multi-user offloading problem in the overlapping domain of a multi-server mobile edge computing system. We divide the original problem into two stages: the offloading decision making stage and the request scheduling stage. To prevent the terminal from going out of service area during offloading, we consider the mobility parameter of the terminal according to the human behaviour model when making the offloading decision, and then introduce a server evaluation mechanism based on both the mobility parameter and the server load to select the optimal offloading server. In order to fully utilise the server resources, we design a double deep Q-network (DDQN)-based reward evaluation algorithm that considers the priority of tasks when scheduling offload requests. Finally, numerical simulations are conducted to verify that our proposed method outperforms traditional mathematical computation methods as well as the DQN algorithm.
4/12/2024

Reconfigurable Intelligent Surface Assisted VEC Based on Multi-Agent Reinforcement Learning
Kangwei Qi, Qiong Wu, Pingyi Fan, Nan Cheng, Qiang Fan, Jiangzhou Wang
0
0
Vehicular edge computing (VEC) is an emerging technology that enables vehicles to perform high-intensity tasks by executing tasks locally or offloading them to nearby edge devices. However, obstacles such as buildings may degrade the communications and incur communication interruptions, and thus the vehicle may not meet the requirement for task offloading. Reconfigurable intelligent surfaces (RIS) is introduced to support vehicle communication and provide an alternative communication path. The system performance can be improved by flexibly adjusting the phase-shift of the RIS. For RIS-assisted VEC system where tasks arrive randomly, we design a control scheme that considers offloading power, local power allocation and phase-shift optimization. To solve this non-convex problem, we propose a new deep reinforcement learning (DRL) framework that employs modified multi-agent deep deterministic policy gradient (MADDPG) approach to optimize the power allocation for vehicle users (VUs) and block coordinate descent (BCD) algorithm to optimize the phase-shift of the RIS. Simulation results show that our proposed scheme outperforms the centralized deep deterministic policy gradient (DDPG) scheme and random scheme.
6/18/2024
Multi-Objective Offloading Optimization in MEC and Vehicular-Fog Systems: A Distributed-TD3 Approach
Frezer Guteta Wakgra, Binayak Kar, Seifu Birhanu Tadele, Shan-Hsiang Shen, Asif Uddin Khan
0
0
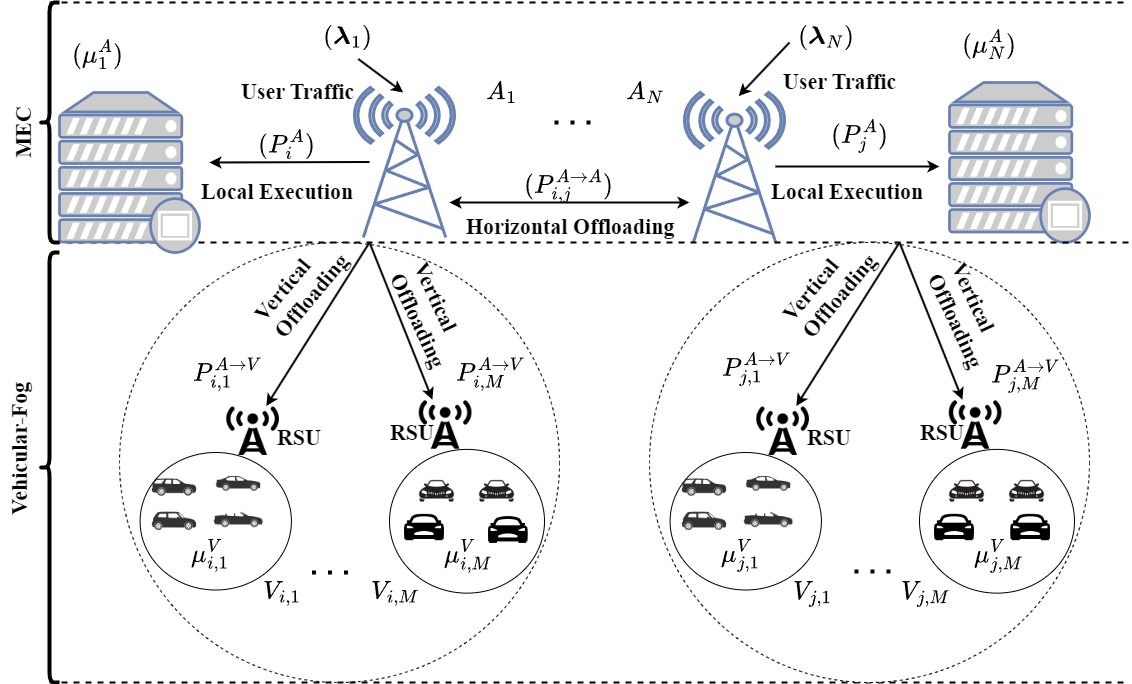
The emergence of 5G networks has enabled the deployment of a two-tier edge and vehicular-fog network. It comprises Multi-access Edge Computing (MEC) and Vehicular-Fogs (VFs), strategically positioned closer to Internet of Things (IoT) devices, reducing propagation latency compared to cloud-based solutions and ensuring satisfactory quality of service (QoS). However, during high-traffic events like concerts or athletic contests, MEC sites may face congestion and become overloaded. Utilizing offloading techniques, we can transfer computationally intensive tasks from resource-constrained devices to those with sufficient capacity, for accelerating tasks and extending device battery life. In this research, we consider offloading within a two-tier MEC and VF architecture, involving offloading from MEC to MEC and from MEC to VF. The primary objective is to minimize the average system cost, considering both latency and energy consumption. To achieve this goal, we formulate a multi-objective optimization problem aimed at minimizing latency and energy while considering given resource constraints. To facilitate decision-making for nearly optimal computational offloading, we design an equivalent reinforcement learning environment that accurately represents the network architecture and the formulated problem. To accomplish this, we propose a Distributed-TD3 (DTD3) approach, which builds on the TD3 algorithm. Extensive simulations, demonstrate that our strategy achieves faster convergence and higher efficiency compared to other benchmark solutions.
4/22/2024