Model-Predictive Trajectory Generation for Autonomous Aerial Search and Coverage
2403.05944
0
0
Abstract
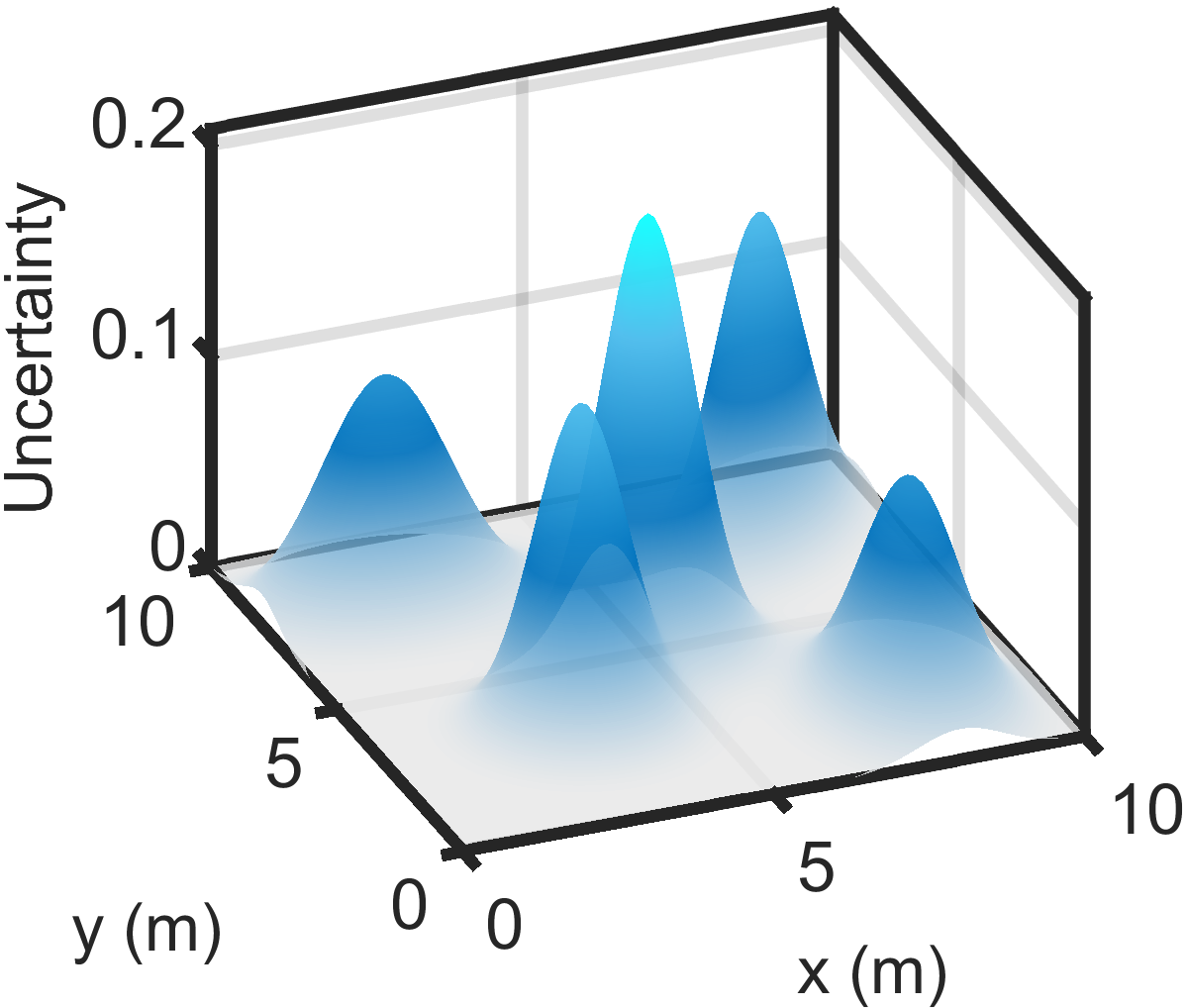
This paper addresses the trajectory planning problem for search and coverage missions with an Unmanned Aerial Vehicle (UAV). The objective is to devise optimal coverage trajectories based on a utility map describing prior region information, assumed to be effectively approximated by a Gaussian Mixture Model (GMM). We introduce a Model Predictive Control (MPC) algorithm employing a relaxed formulation that promotes the exploration of the map by preventing the UAV from revisiting previously covered areas. This is achieved by penalizing intersections between the UAV's visibility regions along its trajectory. The algorithm is assessed in MATLAB and validated in Gazebo, as well as in outdoor experimental tests. The results show that the proposed strategy can generate efficient and smooth trajectories for search and coverage missions.
Create account to get full access
Overview
- Presents a model-predictive trajectory generation approach for autonomous aerial vehicles tasked with search and coverage missions
- Leverages Gaussian mixture models to represent uncertain environmental information and a receding horizon control strategy for real-time trajectory planning
- Demonstrates improved coverage performance compared to alternative methods in simulated search and coverage scenarios
Plain English Explanation
This research paper describes a new technique for planning the flight paths of autonomous aerial vehicles, such as drones or unmanned aerial vehicles (UAVs), that are tasked with searching an area or covering a certain region. The key idea is to use a mathematical model called a Gaussian mixture model to represent any uncertainty or incomplete information about the environment that the UAV is operating in.
By understanding how this environmental uncertainty is distributed, the researchers can then use a control strategy called model predictive control to plan the UAV's trajectory in real-time. This allows the UAV to continuously adjust its flight path based on the latest sensor data and environmental information, rather than just following a pre-determined route.
The researchers show through computer simulations that this approach leads to better coverage of the search area and more efficient exploration compared to alternative trajectory planning methods. This could be valuable for applications like search and rescue operations, wildlife monitoring, or surveying hard-to-access areas.
The main benefit of this technique is that it allows the UAV to adapt its behavior on the fly based on the specific conditions it encounters, rather than following a rigid plan. This increased flexibility and responsiveness can translate to better mission outcomes in complex, uncertain environments.
Technical Explanation
The paper presents a model-predictive trajectory generation approach for autonomous aerial vehicles performing search and coverage tasks. The key technical elements include:
-
Gaussian Mixture Model: The researchers use a Gaussian mixture model (GMM) to represent the uncertain distribution of environmental information, such as the locations of targets or areas of interest. This probabilistic representation allows the system to reason about the likelihood of different regions containing valuable information.
-
Model Predictive Control: A receding horizon control strategy is employed, where the UAV continuously plans its trajectory by solving an optimization problem that balances exploration, coverage, and other mission objectives over a finite time horizon. This allows the UAV to adapt its behavior in real-time as new information becomes available.
-
Trajectory Generation: The optimization problem is formulated to generate smooth, dynamically feasible trajectories for the UAV that maximize the expected information gain while respecting constraints such as obstacles and flight dynamics.
-
Simulation Experiments: The researchers evaluate their approach in simulation scenarios involving search and coverage tasks, comparing it to alternative methods such as frontier-based exploration and lawnmower coverage patterns. The results demonstrate improved coverage performance and exploration efficiency.
Critical Analysis
The paper presents a well-designed and thoughtfully implemented approach to autonomous aerial search and coverage tasks. The use of Gaussian mixture models to represent environmental uncertainty is a principled and flexible way to incorporate incomplete information into the planning process.
One potential limitation is the reliance on simulation-based evaluation. While the simulated scenarios appear to be reasonably realistic, it would be valuable to see how the approach performs in real-world experiments with physical UAVs and more complex, unstructured environments. Aspects such as sensor noise, wind disturbances, and other practical challenges could impact the algorithm's performance in unpredictable ways.
Additionally, the paper does not explore the computational complexity and real-time performance of the proposed approach. In practical applications, the trajectory planning algorithm must be able to execute quickly enough to keep up with the UAV's dynamics and continuously changing environmental conditions.
Further research could investigate ways to improve the scalability and robustness of the approach, such as by exploring decentralized or hierarchical planning strategies, or by incorporating more sophisticated models of the environment and target dynamics. Comparisons to other state-of-the-art methods in the literature would also help to better situate the contributions of this work.
Conclusion
This research paper presents a novel model-predictive trajectory generation approach for autonomous aerial vehicles engaged in search and coverage tasks. By leveraging Gaussian mixture models to represent environmental uncertainty and a receding horizon control strategy for real-time planning, the proposed system demonstrates improved coverage performance and exploration efficiency compared to alternative methods.
The technical merits of the approach, particularly the principled way of incorporating probabilistic environmental information into the planning process, make it a promising direction for further research and development in the field of autonomous aerial robotics. While the simulation-based evaluation provides a solid proof of concept, future work should focus on validating the approach in real-world experiments and addressing practical implementation challenges to enable its deployment in realistic applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

An exact coverage path planning algorithm for UAV-based search and rescue operations
Sina Kazemdehbashi, Yanchao Liu
0
0
Unmanned aerial vehicles (UAVs) are increasingly utilized in global search and rescue efforts, enhancing operational efficiency. In these missions, a coordinated swarm of UAVs is deployed to efficiently cover expansive areas by capturing and analyzing aerial imagery and footage. Rapid coverage is paramount in these scenarios, as swift discovery can mean the difference between life and death for those in peril. This paper focuses on optimizing flight path planning for multiple UAVs in windy conditions to efficiently cover rectangular search areas in minimal time. We address this challenge by dividing the search area into a grid network and formulating it as a mixed-integer program (MIP). Our research introduces a precise lower bound for the objective function and an exact algorithm capable of finding either the optimal solution or a near-optimal solution with a constant absolute gap to optimality. Notably, as the problem complexity increases, our solution exhibits a diminishing relative optimality gap while maintaining negligible computational costs compared to the MIP approach.
5/21/2024
🛸
New!Multi-UAVs end-to-end Distributed Trajectory Generation over Point Cloud Data
Antonio Marino (RAINBOW), Claudio Pacchierotti (RAINBOW), Paolo Robuffo Giordano (RAINBOW)
0
0
This paper introduces an end-to-end trajectory planning algorithm tailored for multi-UAV systems that generates collision-free trajectories in environments populated with both static and dynamic obstacles, leveraging point cloud data. Our approach consists of a 2-fork neural network fed with sensing and localization data, able to communicate intermediate learned features among the agents. One network branch crafts an initial collision-free trajectory estimate, while the other devises a neural collision constraint for subsequent optimization, ensuring trajectory continuity and adherence to physicalactuation limits. Extensive simulations in challenging cluttered environments, involving up to 25 robots and 25% obstacle density, show a collision avoidance success rate in the range of 100 -- 85%. Finally, we introduce a saliency map computation method acting on the point cloud data, offering qualitative insights into our methodology.
7/1/2024
🛠️
Trajectory Optimization for Adaptive Informative Path Planning with Multimodal Sensing
Joshua Ott, Edward Balaban, Mykel Kochenderfer
0
0
We consider the problem of an autonomous agent equipped with multiple sensors, each with different sensing precision and energy costs. The agent's goal is to explore the environment and gather information subject to its resource constraints in unknown, partially observable environments. The challenge lies in reasoning about the effects of sensing and movement while respecting the agent's resource and dynamic constraints. We formulate the problem as a trajectory optimization problem and solve it using a projection-based trajectory optimization approach where the objective is to reduce the variance of the Gaussian process world belief. Our approach outperforms previous approaches in long horizon trajectories by achieving an overall variance reduction of up to 85% and reducing the root-mean square error in the environment belief by 50%. This approach was developed in support of rover path planning for the NASA VIPER Mission.
4/30/2024
🔮
A Cognitive-Driven Trajectory Prediction Model for Autonomous Driving in Mixed Autonomy Environment
Haicheng Liao, Zhenning Li, Chengyue Wang, Bonan Wang, Hanlin Kong, Yanchen Guan, Guofa Li, Zhiyong Cui, Chengzhong Xu
0
0
As autonomous driving technology progresses, the need for precise trajectory prediction models becomes paramount. This paper introduces an innovative model that infuses cognitive insights into trajectory prediction, focusing on perceived safety and dynamic decision-making. Distinct from traditional approaches, our model excels in analyzing interactions and behavior patterns in mixed autonomy traffic scenarios. It represents a significant leap forward, achieving marked performance improvements on several key datasets. Specifically, it surpasses existing benchmarks with gains of 16.2% on the Next Generation Simulation (NGSIM), 27.4% on the Highway Drone (HighD), and 19.8% on the Macao Connected Autonomous Driving (MoCAD) dataset. Our proposed model shows exceptional proficiency in handling corner cases, essential for real-world applications. Moreover, its robustness is evident in scenarios with missing or limited data, outperforming most of the state-of-the-art baselines. This adaptability and resilience position our model as a viable tool for real-world autonomous driving systems, heralding a new standard in vehicle trajectory prediction for enhanced safety and efficiency.
4/29/2024