Multi-Robot Cooperative Socially-Aware Navigation Using Multi-Agent Reinforcement Learning
2309.15234
0
0

Abstract
In public spaces shared with humans, ensuring multi-robot systems navigate without collisions while respecting social norms is challenging, particularly with limited communication. Although current robot social navigation techniques leverage advances in reinforcement learning and deep learning, they frequently overlook robot dynamics in simulations, leading to a simulation-to-reality gap. In this paper, we bridge this gap by presenting a new multi-robot social navigation environment crafted using Dec-POSMDP and multi-agent reinforcement learning. Furthermore, we introduce SAMARL: a novel benchmark for cooperative multi-robot social navigation. SAMARL employs a unique spatial-temporal transformer combined with multi-agent reinforcement learning. This approach effectively captures the complex interactions between robots and humans, thus promoting cooperative tendencies in multi-robot systems. Our extensive experiments reveal that SAMARL outperforms existing baseline and ablation models in our designed environment. Demo videos for this work can be found at: https://sites.google.com/view/samarl
Create account to get full access
Overview
- The paper explores a multi-robot cooperative navigation system using multi-agent reinforcement learning techniques
- It aims to enable robots to navigate in crowded environments while considering social norms and avoiding collisions
- The approach involves training a deep reinforcement learning model to coordinate the movement of multiple robots
Plain English Explanation
The researchers have developed a new way for multiple robots to navigate together in crowded spaces while being mindful of social customs. Instead of having each robot act independently, the system trains the robots using a machine learning technique called multi-agent reinforcement learning.
This allows the robots to learn how to coordinate their movements and avoid collisions, while also taking into account things like not getting too close to people or cutting them off. The goal is for the robots to be able to smoothly navigate around humans and other obstacles, behaving in a socially appropriate manner.
By using this multi-agent approach, the robots can learn from each other's experiences and develop strategies for navigating complex social environments. This could be useful for applications like delivery robots, self-driving cars, or robots assisting humans in crowded public spaces.
Technical Explanation
The paper presents a multi-robot cooperative socially-aware navigation system that leverages multi-agent reinforcement learning. The key idea is to train a deep reinforcement learning model that can coordinate the movement of multiple robots, enabling them to navigate crowded environments while considering social norms and avoiding collisions.
The approach involves formulating the problem as a multi-agent Markov decision process, where each robot is an agent that can observe the state of the environment and take actions to achieve its goal. The reward function encourages the robots to reach their destinations efficiently while also maintaining appropriate social distances from humans and other obstacles.
The researchers utilize deep neural networks to approximate the value function and policy for each robot, and they employ communication mechanisms to allow the robots to share information and coordinate their actions.
Critical Analysis
The paper presents a promising approach for enabling multi-robot navigation in crowded, socially-aware environments. The use of multi-agent reinforcement learning is an interesting and potentially powerful technique, as it allows the robots to learn from each other's experiences and develop more sophisticated strategies.
However, the paper does not address some potential limitations of the approach, such as the scalability of the system as the number of robots increases, or how the system would handle dynamic changes in the environment or unexpected obstacles. Additionally, the paper does not provide a detailed analysis of the computational and memory requirements of the deep neural networks used in the system.
Further research could explore ways to make the system more robust and adaptable, such as incorporating techniques for transfer learning or meta-learning, or investigating alternative reinforcement learning algorithms that may be better suited for the multi-agent setting.
Conclusion
This research presents a novel approach to multi-robot navigation that takes into account social norms and behaviors. By leveraging multi-agent reinforcement learning, the system enables robots to coordinate their movements and navigate complex environments while maintaining appropriate social distances and avoiding collisions.
The potential applications of this technology are wide-ranging, from delivery robots in crowded urban areas to autonomous vehicles in mixed traffic environments. As the field of robotics continues to advance, the ability to develop socially-aware navigation systems will become increasingly important for ensuring the safe and ethical deployment of these technologies in real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
MeSA-DRL: Memory-Enhanced Deep Reinforcement Learning for Advanced Socially Aware Robot Navigation in Crowded Environments
Mannan Saeed Muhammad, Estrella Montero
0
0
Autonomous navigation capabilities play a critical role in service robots operating in environments where human interactions are pivotal, due to the dynamic and unpredictable nature of these environments. However, the variability in human behavior presents a substantial challenge for robots in predicting and anticipating movements, particularly in crowded scenarios. To address this issue, a memory-enabled deep reinforcement learning framework is proposed for autonomous robot navigation in diverse pedestrian scenarios. The proposed framework leverages long-term memory to retain essential information about the surroundings and model sequential dependencies effectively. The importance of human-robot interactions is also encoded to assign higher attention to these interactions. A global planning mechanism is incorporated into the memory-enabled architecture. Additionally, a multi-term reward system is designed to prioritize and encourage long-sighted robot behaviors by incorporating dynamic warning zones. Simultaneously, it promotes smooth trajectories and minimizes the time taken to reach the robot's desired goal. Extensive simulation experiments show that the suggested approach outperforms representative state-of-the-art methods, showcasing its ability to a navigation efficiency and safety in real-world scenarios.
4/9/2024

Adaptive Social Force Window Planner with Reinforcement Learning
Mauro Martini, No'e P'erez-Higueras, Andrea Ostuni, Marcello Chiaberge, Fernando Caballero, Luis Merino
0
0
Human-aware navigation is a complex task for mobile robots, requiring an autonomous navigation system capable of achieving efficient path planning together with socially compliant behaviors. Social planners usually add costs or constraints to the objective function, leading to intricate tuning processes or tailoring the solution to the specific social scenario. Machine Learning can enhance planners' versatility and help them learn complex social behaviors from data. This work proposes an adaptive social planner, using a Deep Reinforcement Learning agent to dynamically adjust the weighting parameters of the cost function used to evaluate trajectories. The resulting planner combines the robustness of the classic Dynamic Window Approach, integrated with a social cost based on the Social Force Model, and the flexibility of learning methods to boost the overall performance on social navigation tasks. Our extensive experimentation on different environments demonstrates the general advantage of the proposed method over static cost planners.
4/23/2024
Learning Adaptive Multi-Objective Robot Navigation with Demonstrations
Jorge de Heuvel, Tharun Sethuraman, Maren Bennewitz
0
0
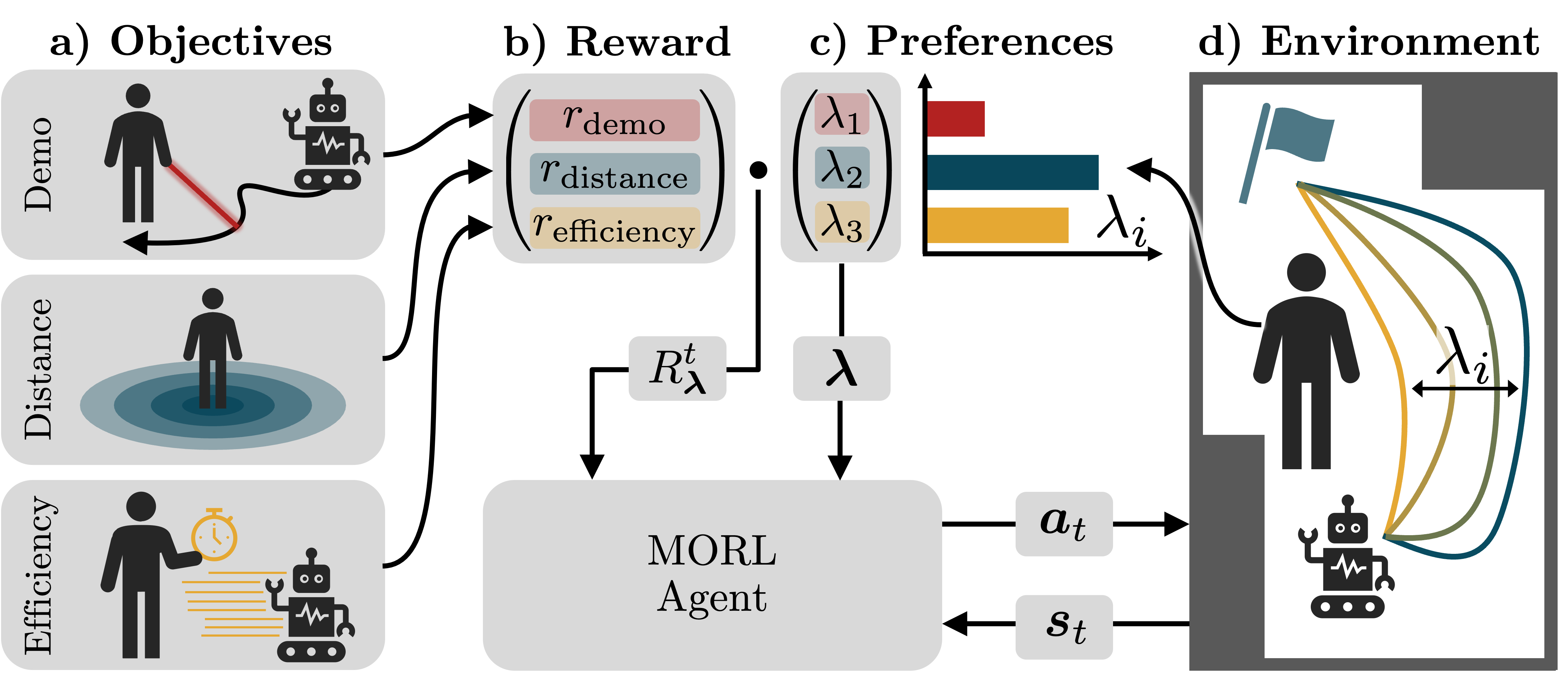
Preference-aligned robot navigation in human environments is typically achieved through learning-based approaches, utilizing demonstrations and user feedback for personalization. However, personal preferences are subject to change and might even be context-dependent. Yet traditional reinforcement learning (RL) approaches with a static reward function often fall short in adapting to these varying user preferences. This paper introduces a framework that combines multi-objective reinforcement learning (MORL) with demonstration-based learning. Our approach allows for dynamic adaptation to changing user preferences without retraining. Through rigorous evaluations, including sim-to-real and robot-to-robot transfers, we demonstrate our framework's capability to reflect user preferences accurately while achieving high navigational performance in terms of collision avoidance and goal pursuance.
4/15/2024
Learning Early Social Maneuvers for Enhanced Social Navigation
Yigit Yildirim, Mehmet Suzer, Emre Ugur
0
0
Socially compliant navigation is an integral part of safety features in Human-Robot Interaction. Traditional approaches to mobile navigation prioritize physical aspects, such as efficiency, but social behaviors gain traction as robots appear more in daily life. Recent techniques to improve the social compliance of navigation often rely on predefined features or reward functions, introducing assumptions about social human behavior. To address this limitation, we propose a novel Learning from Demonstration (LfD) framework for social navigation that exclusively utilizes raw sensory data. Additionally, the proposed system contains mechanisms to consider the future paths of the surrounding pedestrians, acknowledging the temporal aspect of the problem. The final product is expected to reduce the anxiety of people sharing their environment with a mobile robot, helping them trust that the robot is aware of their presence and will not harm them. As the framework is currently being developed, we outline its components, present experimental results, and discuss future work towards realizing this framework.
5/3/2024