Optimal Gait Design for a Soft Quadruped Robot via Multi-fidelity Bayesian Optimization
2406.07065
0
0

Abstract
This study focuses on the locomotion capability improvement in a tendon-driven soft quadruped robot through an online adaptive learning approach. Leveraging the inverse kinematics model of the soft quadruped robot, we employ a central pattern generator to design a parametric gait pattern, and use Bayesian optimization (BO) to find the optimal parameters. Further, to address the challenges of modeling discrepancies, we implement a multi-fidelity BO approach, combining data from both simulation and physical experiments throughout training and optimization. This strategy enables the adaptive refinement of the gait pattern and ensures a smooth transition from simulation to real-world deployment for the controller. Moreover, we integrate a computational task off-loading architecture by edge computing, which reduces the onboard computational and memory overhead, to improve real-time control performance and facilitate an effective online learning process. The proposed approach successfully achieves optimal walking gait design for physical deployment with high efficiency, effectively addressing challenges related to the reality gap in soft robotics.
Create account to get full access
Overview
- This paper presents a multi-fidelity Bayesian optimization approach for designing optimal gaits for a soft quadruped robot.
- The researchers developed a real-time simulation model and a low-fidelity analytical model to efficiently explore the gait parameter space.
- They used this multi-fidelity approach to optimize the robot's speed and energy efficiency, demonstrating the effectiveness of their method through simulations and experiments.
Plain English Explanation
The researchers in this paper were trying to find the best way for a four-legged robot made of soft materials to move around efficiently. Robots like this can be useful for things like search and rescue missions in difficult environments. But designing the right movement pattern, or "gait," for these soft robots is challenging.
The key idea the researchers used is called "multi-fidelity Bayesian optimization." This means they created two different computer models of the robot - a detailed, high-fidelity model and a simpler, low-fidelity model. They then used these models together to systematically test out different gaits and figure out the most efficient one.
The high-fidelity model gave very accurate results but took a long time to run. The low-fidelity model was faster but less accurate. By combining the strengths of both models, the researchers were able to explore a wide range of possible gaits and find the optimal one, balancing speed and energy efficiency.
Through simulations and real-world experiments, they showed that this multi-fidelity approach led to significant improvements in the robot's performance compared to using just a single model. This demonstrates the power of combining different levels of detail to tackle complex optimization problems.
Technical Explanation
The researchers developed a multi-fidelity Bayesian optimization approach to design optimal gaits for a soft quadruped robot. They created a high-fidelity simulation model based on the robot's physical properties and a lower-fidelity analytical model that approximated the robot's dynamics.
By combining these two models, they were able to efficiently explore the robot's gait parameter space and identify the optimal gait that maximized speed and energy efficiency. The low-fidelity model allowed for rapid evaluation of many candidate gaits, while the high-fidelity model provided accurate performance predictions.
The researchers used Bayesian optimization to intelligently select the most promising gait parameters to evaluate using the high-fidelity model, avoiding the need to exhaustively test all possible combinations.
Their results demonstrated the effectiveness of this multi-fidelity approach compared to using a single model. The optimal gaits identified through this process led to significant improvements in the robot's speed and energy efficiency, as validated through both simulations and physical experiments.
Critical Analysis
The paper provides a thorough and well-designed study, with a clear motivation for the research and a robust experimental methodology. The use of multi-fidelity modeling is a key strength, as it allows the researchers to balance the accuracy of the high-fidelity model with the computational efficiency of the low-fidelity model.
However, the paper does not delve deeply into the limitations of the low-fidelity analytical model or the potential sources of error in the high-fidelity simulation. Additionally, the physical experiments were conducted on a single robot prototype, so the generalizability of the findings to other soft quadruped platforms is not fully addressed.
Further research could explore the application of this multi-fidelity optimization approach to a wider range of soft robotic systems, as well as investigate methods for automatically refining the low-fidelity model to improve its accuracy and predictive capabilities.
Conclusion
This paper presents a compelling approach for optimizing the gait of a soft quadruped robot by leveraging multi-fidelity Bayesian optimization. The researchers demonstrated the effectiveness of their method through simulations and physical experiments, achieving significant improvements in the robot's speed and energy efficiency.
The use of complementary high-fidelity and low-fidelity models is a key innovation that allows for efficient exploration of the gait parameter space. This work contributes to the broader field of soft robotics, providing a valuable framework for designing and optimizing the locomotion capabilities of these versatile and adaptable systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
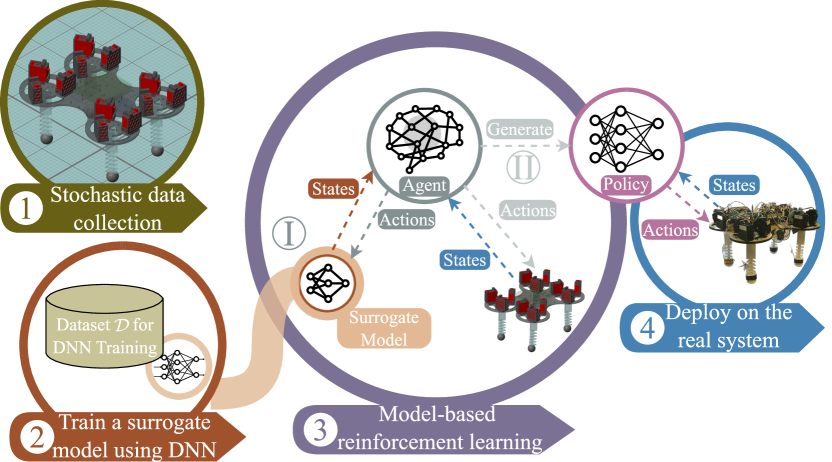
Optimal Gait Control for a Tendon-driven Soft Quadruped Robot by Model-based Reinforcement Learning
Xuezhi Niu, Kaige Tan, Lei Feng
0
0
This study presents an innovative approach to optimal gait control for a soft quadruped robot enabled by four Compressible Tendon-driven Soft Actuators (CTSAs). Improving our previous studies of using model-free reinforcement learning for gait control, we employ model-based reinforcement learning (MBRL) to further enhance the performance of the gait controller. Compared to rigid robots, the proposed soft quadruped robot has better safety, less weight, and a simpler mechanism for fabrication and control. However, the primary challenge lies in developing sophisticated control algorithms to attain optimal gait control for fast and stable locomotion. The research employs a multi-stage methodology, including state space restriction, data-driven model training, and reinforcement learning algorithm development. Compared to benchmark methods, the proposed MBRL algorithm, combined with post-training, significantly improves the efficiency and performance of gait control policies. The developed policy is both robust and adaptable to the robot's deformable morphology. The study concludes by highlighting the practical applicability of these findings in real-world scenarios.
6/12/2024

Adaptive Gait Modeling and Optimization for Principally Kinematic Systems
Siming Deng, Noah J. Cowan, Brian A. Bittner
0
0
Robotic adaptation to unanticipated operating conditions is crucial to achieving persistence and robustness in complex real world settings. For a wide range of cutting-edge robotic systems, such as micro- and nano-scale robots, soft robots, medical robots, and bio-hybrid robots, it is infeasible to anticipate the operating environment a priori due to complexities that arise from numerous factors including imprecision in manufacturing, chemo-mechanical forces, and poorly understood contact mechanics. Drawing inspiration from data-driven modeling, geometric mechanics (or gauge theory), and adaptive control, we employ an adaptive system identification framework and demonstrate its efficacy in enhancing the performance of principally kinematic locomotors (those governed by Rayleigh dissipation or zero momentum conservation). We showcase the capability of the adaptive model to efficiently accommodate varying terrains and iteratively modified behaviors within a behavior optimization framework. This provides both the ability to improve fundamental behaviors and perform motion tracking to precision. Notably, we are capable of optimizing the gaits of the Purcell swimmer using approximately 10 cycles per link, which for the nine-link Purcell swimmer provides a factor of ten improvement in optimization speed over the state of the art. Beyond simply a computational speed up, this ten-fold improvement may enable this method to be successfully deployed for in-situ behavior refinement, injury recovery, and terrain adaptation, particularly in domains where simulations provide poor guides for the real world.
4/19/2024
🏅
Agile and versatile bipedal robot tracking control through reinforcement learning
Jiayi Li, Linqi Ye, Yi Cheng, Houde Liu, Bin Liang
0
0
The remarkable athletic intelligence displayed by humans in complex dynamic movements such as dancing and gymnastics suggests that the balance mechanism in biological beings is decoupled from specific movement patterns. This decoupling allows for the execution of both learned and unlearned movements under certain constraints while maintaining balance through minor whole-body coordination. To replicate this balance ability and body agility, this paper proposes a versatile controller for bipedal robots. This controller achieves ankle and body trajectory tracking across a wide range of gaits using a single small-scale neural network, which is based on a model-based IK solver and reinforcement learning. We consider a single step as the smallest control unit and design a universally applicable control input form suitable for any single-step variation. Highly flexible gait control can be achieved by combining these minimal control units with high-level policy through our extensible control interface. To enhance the trajectory-tracking capability of our controller, we utilize a three-stage training curriculum. After training, the robot can move freely between target footholds at varying distances and heights. The robot can also maintain static balance without repeated stepping to adjust posture. Finally, we evaluate the tracking accuracy of our controller on various bipedal tasks, and the effectiveness of our control framework is verified in the simulation environment.
4/15/2024

Harnessing Natural Oscillations for High-Speed, Efficient Asymmetrical Locomotion in Quadrupedal Robots
Jing Cheng, Yasser G. Alqaham, Zhenyu Gan
0
0
This study explores the dynamics of asymmetrical bounding gaits in quadrupedal robots, focusing on the integration of torso pitching and hip motion to enhance speed and stability. Traditional control strategies often enforce a fixed posture, minimizing natural body movements to simplify the control problem. However, this approach may overlook the inherent dynamical advantages found in natural locomotion. By considering the robot as two interconnected segments, we concentrate on stance leg motion while allowing passive torso oscillation, drawing inspiration from natural dynamics and underactuated robotics principles. Our control scheme employs Linear Inverted Pendulum (LIP) and Spring-Loaded Inverted Pendulum (SLIP) models to govern front and rear leg movements independently. This approach has been validated through extensive simulations and hardware experiments, demonstrating successful high-speed locomotion with top speeds nearing 4 m/s and reduced ground reaction forces, indicating a more efficient gait. Furthermore, unlike conventional methods, our strategy leverages natural torso oscillations to aid leg circulation and stride length, aligning robot dynamics more closely with biological counterparts. Our findings suggest that embracing the natural dynamics of quadrupedal movement, particularly in asymmetrical gaits like bounding, can lead to more stable, efficient, and high-speed robotic locomotion. This investigation lays the groundwork for future studies on versatile and dynamic quadrupedal gaits and their potential applications in scenarios demanding rapid and effective locomotion.
5/29/2024