Planning to Go Out-of-Distribution in Offline-to-Online Reinforcement Learning
2310.05723
0
0
🏅
Abstract
Offline pretraining with a static dataset followed by online fine-tuning (offline-to-online, or OtO) is a paradigm well matched to a real-world RL deployment process. In this scenario, we aim to find the best-performing policy within a limited budget of online interactions. Previous work in the OtO setting has focused on correcting for bias introduced by the policy-constraint mechanisms of offline RL algorithms. Such constraints keep the learned policy close to the behavior policy that collected the dataset, but we show this can unnecessarily limit policy performance if the behavior policy is far from optimal. Instead, we forgo constraints and frame OtO RL as an exploration problem that aims to maximize the benefit of online data-collection. We first study the major online RL exploration methods based on intrinsic rewards and UCB in the OtO setting, showing that intrinsic rewards add training instability through reward-function modification, and UCB methods are myopic and it is unclear which learned-component's ensemble to use for action selection. We then introduce an algorithm for planning to go out-of-distribution (PTGOOD) that avoids these issues. PTGOOD uses a non-myopic planning procedure that targets exploration in relatively high-reward regions of the state-action space unlikely to be visited by the behavior policy. By leveraging concepts from the Conditional Entropy Bottleneck, PTGOOD encourages data collected online to provide new information relevant to improving the final deployment policy without altering rewards. We show empirically in several continuous control tasks that PTGOOD significantly improves agent returns during online fine-tuning and avoids the suboptimal policy convergence that many of our baselines exhibit in several environments.
Create account to get full access
Overview
- Offline pretraining with a static dataset followed by online fine-tuning (offline-to-online, or OtO) is a common approach for real-world reinforcement learning (RL) deployment.
- Previous OtO work focused on correcting for bias introduced by offline RL algorithms' policy-constraint mechanisms, which can limit policy performance if the behavior policy is suboptimal.
- Instead, this paper frames OtO RL as an exploration problem to maximize the benefit of online data collection, avoiding constraints.
- The authors study major online RL exploration methods based on intrinsic rewards and UCB in the OtO setting, then introduce an algorithm called PTGOOD that avoids their issues.
Plain English Explanation
In the real world, reinforcement learning (RL) systems often go through two main stages: first, they are trained on a static dataset offline, and then they are fine-tuned online with real-time interactions. This "offline-to-online" (OtO) process is a common approach.
Previous work on OtO RL has focused on trying to correct for biases introduced by the offline RL algorithms. These algorithms use "policy constraints" to keep the learned policy close to the original "behavior policy" that collected the dataset. However, the authors show that this can actually limit the policy's performance if the behavior policy was not very good in the first place.
Instead, the authors in this paper decide to avoid those constraints and treat OtO RL as more of an exploration problem. The goal is to find the best-performing policy by actively exploring and collecting new data online, rather than being overly constrained by the offline dataset.
The paper first looks at some major exploration methods used in online RL, like those based on "intrinsic rewards" and "upper confidence bound" (UCB). But the authors find that these approaches have some issues - intrinsic rewards can make training unstable by modifying the reward function, and UCB methods are shortsighted and unclear on which parts of the learned model to use for exploration.
To address these problems, the authors introduce a new algorithm called PTGOOD (Planning to Go Out-Of-Distribution). PTGOOD uses a more sophisticated planning procedure to target exploration in potentially high-reward regions of the state-action space that the behavior policy was unlikely to visit. By leveraging ideas from the "Conditional Entropy Bottleneck", PTGOOD encourages the collection of online data that provides new information to improve the final deployment policy, without directly changing the rewards.
The authors show empirically that PTGOOD significantly improves agent returns during online fine-tuning and avoids the suboptimal policy convergence that many other exploration methods exhibit in several continuous control tasks.
Technical Explanation
The paper proposes a new approach for the offline-to-online reinforcement learning (OtO) setting, where an agent is first pretrained on a static offline dataset and then fine-tuned online with real-time interactions.
Previous work in OtO RL has focused on correcting for the bias introduced by the policy-constraint mechanisms used in offline RL algorithms like BEAR and BRAC. These constraints aim to keep the learned policy close to the "behavior policy" that collected the offline dataset, but the authors show this can unnecessarily limit performance if the behavior policy is suboptimal.
Instead, the authors frame OtO RL as an exploration problem, forgoing policy constraints to maximize the benefit of online data collection. They first study major online RL exploration methods based on intrinsic rewards and UCB, finding issues with each:
- Intrinsic rewards can introduce training instability by modifying the reward function.
- UCB methods are myopic and unclear on which learned components to use for action selection.
To address these problems, the authors introduce the "Planning to Go Out-Of-Distribution" (PTGOOD) algorithm. PTGOOD uses a non-myopic planning procedure that targets exploration in high-reward regions of the state-action space unlikely to be visited by the behavior policy. By leveraging the Conditional Entropy Bottleneck, PTGOOD encourages the collection of online data that provides new information to improve the final deployment policy, without directly modifying the rewards.
The authors show empirically that PTGOOD significantly outperforms baseline exploration methods in several continuous control tasks, avoiding the suboptimal policy convergence exhibited by many other approaches.
Critical Analysis
The paper presents a novel and promising approach to the OtO reinforcement learning setting, addressing limitations of previous work that relied on policy constraints. By framing the problem as one of exploration, the authors are able to develop the PTGOOD algorithm that can effectively guide the agent to collect informative online data without the stability issues of intrinsic rewards or the myopia of UCB methods.
However, the paper does not fully explore the potential limitations or caveats of the PTGOOD approach. For example, the planning procedure at the core of PTGOOD may become computationally intractable in higher-dimensional or more complex environments. The authors also do not discuss how PTGOOD would perform in settings with sparse or delayed rewards, where exploration is particularly challenging.
Additionally, while the empirical results are compelling, the authors could have strengthened their analysis by comparing PTGOOD to a wider range of baselines, including more recent offline-to-online RL methods. This would help better situate the contributions of PTGOOD and provide a more comprehensive understanding of its strengths and weaknesses.
Overall, the paper presents an innovative solution to the OtO RL problem and makes a valuable contribution to the field. However, further research is needed to fully characterize the capabilities and limitations of the PTGOOD approach, especially in more complex and challenging real-world scenarios.
Conclusion
This paper introduces a new algorithm called PTGOOD that addresses limitations in previous work on offline-to-online reinforcement learning (OtO RL). By framing OtO RL as an exploration problem and using a sophisticated planning procedure, PTGOOD can effectively guide an agent to collect informative online data without the stability issues and myopia of other exploration methods.
The authors show that PTGOOD significantly outperforms baseline approaches in several continuous control tasks, avoiding the suboptimal policy convergence exhibited by many other methods. This work represents an important step forward in developing robust and effective OtO RL systems that can leverage offline pretraining to maximize the value of online fine-tuning.
Looking ahead, further research is needed to fully characterize the capabilities and limitations of the PTGOOD approach, especially in more complex real-world scenarios. Exploring its performance in sparse or delayed reward settings, as well as comparing it to a wider range of baselines, would help solidify its contributions to the field of offline-to-online reinforcement learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Offline Trajectory Generalization for Offline Reinforcement Learning
Ziqi Zhao, Zhaochun Ren, Liu Yang, Fajie Yuan, Pengjie Ren, Zhumin Chen, jun Ma, Xin Xin
0
0
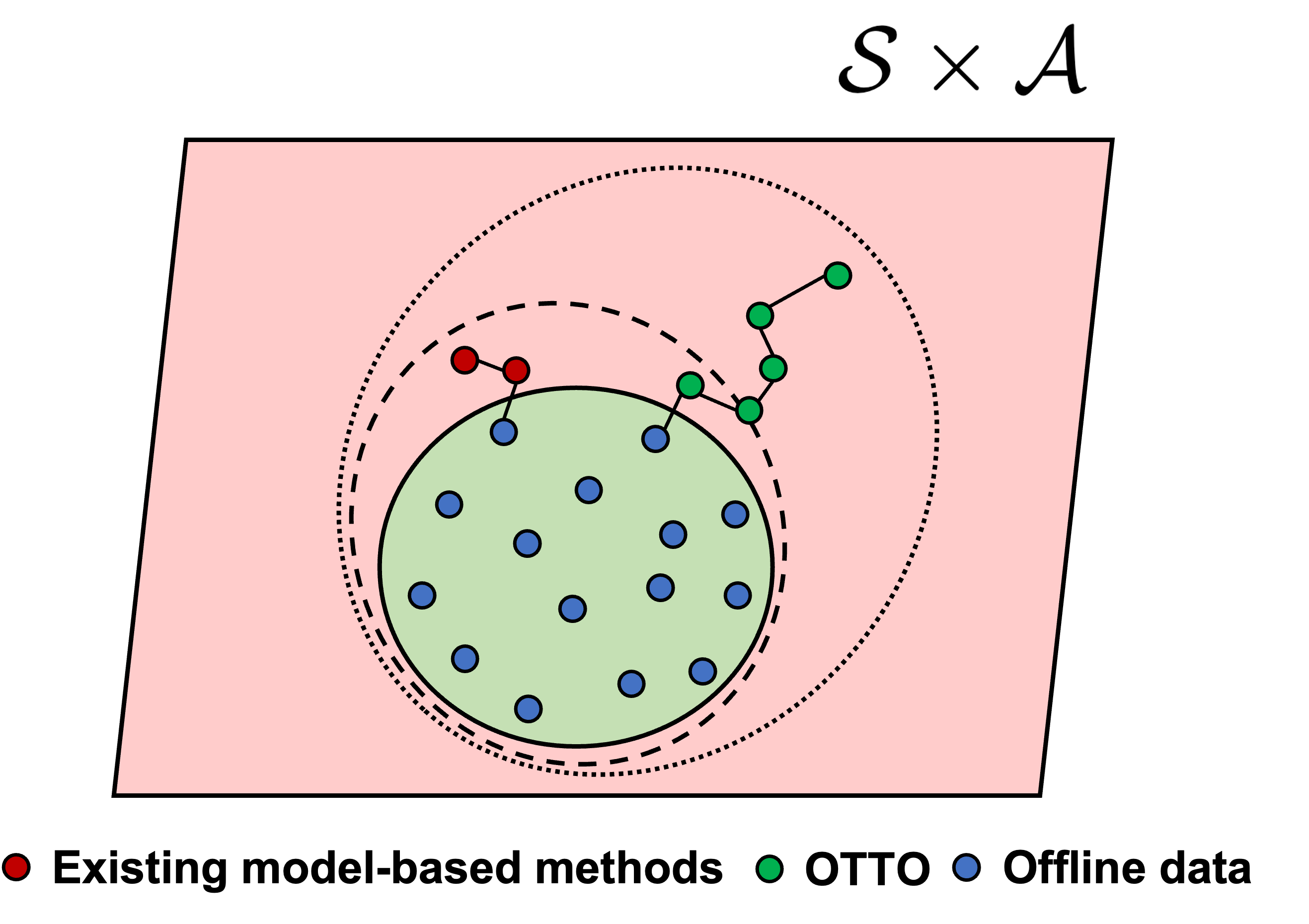
Offline reinforcement learning (RL) aims to learn policies from static datasets of previously collected trajectories. Existing methods for offline RL either constrain the learned policy to the support of offline data or utilize model-based virtual environments to generate simulated rollouts. However, these methods suffer from (i) poor generalization to unseen states; and (ii) trivial improvement from low-qualified rollout simulation. In this paper, we propose offline trajectory generalization through world transformers for offline reinforcement learning (OTTO). Specifically, we use casual Transformers, a.k.a. World Transformers, to predict state dynamics and the immediate reward. Then we propose four strategies to use World Transformers to generate high-rewarded trajectory simulation by perturbing the offline data. Finally, we jointly use offline data with simulated data to train an offline RL algorithm. OTTO serves as a plug-in module and can be integrated with existing offline RL methods to enhance them with better generalization capability of transformers and high-rewarded data augmentation. Conducting extensive experiments on D4RL benchmark datasets, we verify that OTTO significantly outperforms state-of-the-art offline RL methods.
4/17/2024

Augmenting Offline RL with Unlabeled Data
Zhao Wang, Briti Gangopadhyay, Jia-Fong Yeh, Shingo Takamatsu
0
0
Recent advancements in offline Reinforcement Learning (Offline RL) have led to an increased focus on methods based on conservative policy updates to address the Out-of-Distribution (OOD) issue. These methods typically involve adding behavior regularization or modifying the critic learning objective, focusing primarily on states or actions with substantial dataset support. However, we challenge this prevailing notion by asserting that the absence of an action or state from a dataset does not necessarily imply its suboptimality. In this paper, we propose a novel approach to tackle the OOD problem. We introduce an offline RL teacher-student framework, complemented by a policy similarity measure. This framework enables the student policy to gain insights not only from the offline RL dataset but also from the knowledge transferred by a teacher policy. The teacher policy is trained using another dataset consisting of state-action pairs, which can be viewed as practical domain knowledge acquired without direct interaction with the environment. We believe this additional knowledge is key to effectively solving the OOD issue. This research represents a significant advancement in integrating a teacher-student network into the actor-critic framework, opening new avenues for studies on knowledge transfer in offline RL and effectively addressing the OOD challenge.
6/12/2024
Bayesian Design Principles for Offline-to-Online Reinforcement Learning
Hao Hu, Yiqin Yang, Jianing Ye, Chengjie Wu, Ziqing Mai, Yujing Hu, Tangjie Lv, Changjie Fan, Qianchuan Zhao, Chongjie Zhang
0
0
Offline reinforcement learning (RL) is crucial for real-world applications where exploration can be costly or unsafe. However, offline learned policies are often suboptimal, and further online fine-tuning is required. In this paper, we tackle the fundamental dilemma of offline-to-online fine-tuning: if the agent remains pessimistic, it may fail to learn a better policy, while if it becomes optimistic directly, performance may suffer from a sudden drop. We show that Bayesian design principles are crucial in solving such a dilemma. Instead of adopting optimistic or pessimistic policies, the agent should act in a way that matches its belief in optimal policies. Such a probability-matching agent can avoid a sudden performance drop while still being guaranteed to find the optimal policy. Based on our theoretical findings, we introduce a novel algorithm that outperforms existing methods on various benchmarks, demonstrating the efficacy of our approach. Overall, the proposed approach provides a new perspective on offline-to-online RL that has the potential to enable more effective learning from offline data.
6/3/2024

Offline Policy Evaluation for Reinforcement Learning with Adaptively Collected Data
Sunil Madhow, Dan Qiao, Ming Yin, Yu-Xiang Wang
0
0
Developing theoretical guarantees on the sample complexity of offline RL methods is an important step towards making data-hungry RL algorithms practically viable. Currently, most results hinge on unrealistic assumptions about the data distribution -- namely that it comprises a set of i.i.d. trajectories collected by a single logging policy. We consider a more general setting where the dataset may have been gathered adaptively. We develop theory for the TMIS Offline Policy Evaluation (OPE) estimator in this generalized setting for tabular MDPs, deriving high-probability, instance-dependent bounds on its estimation error. We also recover minimax-optimal offline learning in the adaptive setting. Finally, we conduct simulations to empirically analyze the behavior of these estimators under adaptive and non-adaptive regimes.
5/2/2024