PlatoNeRF: 3D Reconstruction in Plato's Cave via Single-View Two-Bounce Lidar
2312.14239
0
0
Abstract
3D reconstruction from a single-view is challenging because of the ambiguity from monocular cues and lack of information about occluded regions. Neural radiance fields (NeRF), while popular for view synthesis and 3D reconstruction, are typically reliant on multi-view images. Existing methods for single-view 3D reconstruction with NeRF rely on either data priors to hallucinate views of occluded regions, which may not be physically accurate, or shadows observed by RGB cameras, which are difficult to detect in ambient light and low albedo backgrounds. We propose using time-of-flight data captured by a single-photon avalanche diode to overcome these limitations. Our method models two-bounce optical paths with NeRF, using lidar transient data for supervision. By leveraging the advantages of both NeRF and two-bounce light measured by lidar, we demonstrate that we can reconstruct visible and occluded geometry without data priors or reliance on controlled ambient lighting or scene albedo. In addition, we demonstrate improved generalization under practical constraints on sensor spatial- and temporal-resolution. We believe our method is a promising direction as single-photon lidars become ubiquitous on consumer devices, such as phones, tablets, and headsets.
Create account to get full access
Overview
- This paper presents PlatoNeRF, a novel 3D reconstruction approach that leverages single-view two-bounce LiDAR data to create detailed 3D models.
- The key idea is to use the reflections from LiDAR signals to infer the shape and appearance of objects behind occluders, similar to how Plato's cave allegory describes perceiving the real world through shadows.
- The authors demonstrate that PlatoNeRF can outperform previous single-view 3D reconstruction methods on challenging benchmark datasets.
Plain English Explanation
PlatoNeRF is a new way to create 3D models of objects and scenes using a single LiDAR sensor. Traditional 3D reconstruction often requires multiple camera views or complex sensor setups, but PlatoNeRF can do it with just one LiDAR.
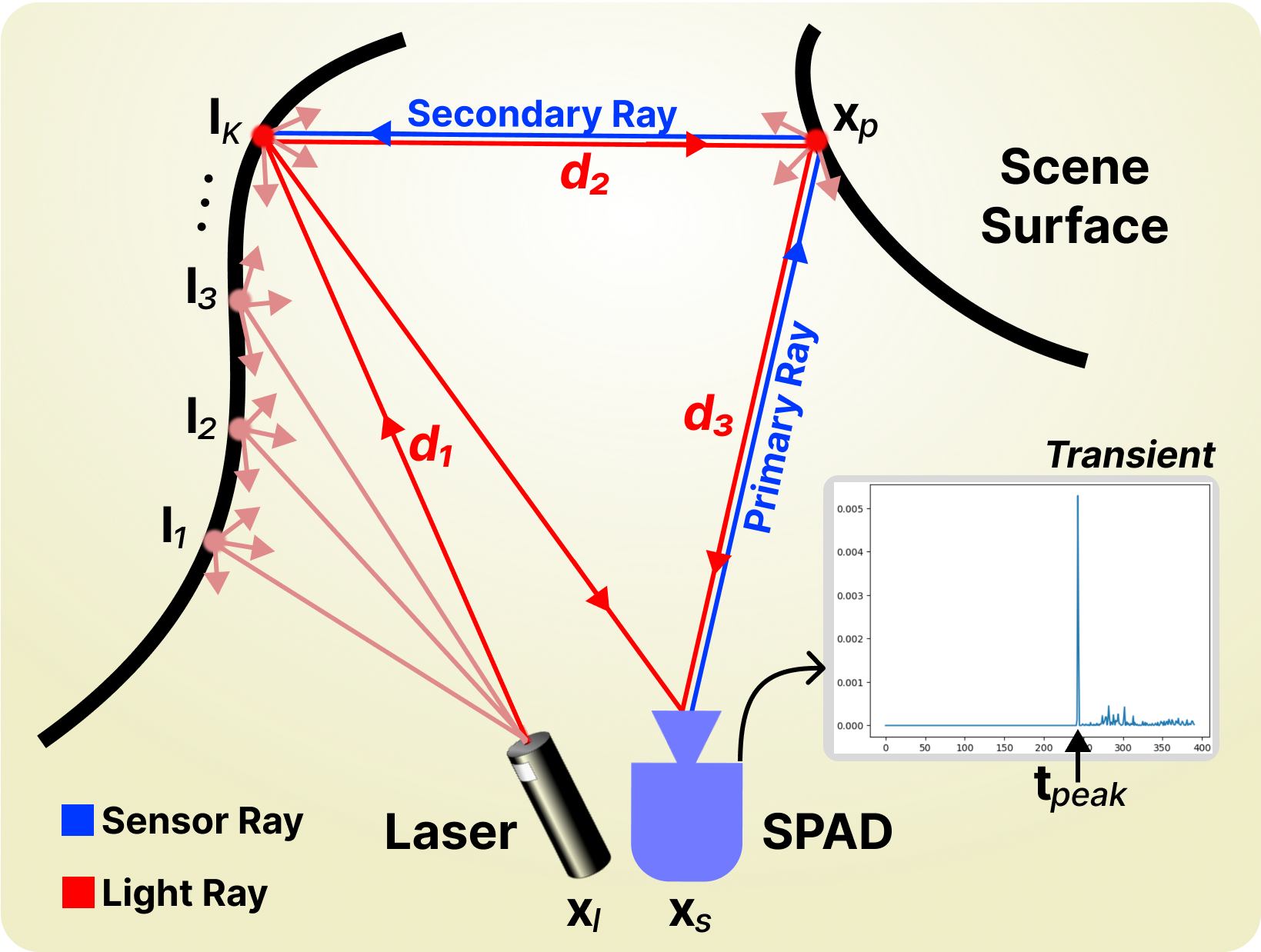
The key insight is that when a LiDAR beam hits an object, some of the light bounces off the object and hits another surface before returning to the sensor. By analyzing these "two-bounce" reflections, PlatoNeRF can infer the shape and appearance of objects that are hidden from the LiDAR's direct line of sight, similar to how Plato's famous cave allegory describes perceiving the real world through shadows on a wall.
The authors show that this single-view two-bounce approach allows PlatoNeRF to outperform previous 3D reconstruction methods that rely on more complex sensor setups or multiple camera views. This could be very useful for applications like autonomous vehicles, robotics, and 3D mapping, where you often need to quickly build 3D models of complex environments with limited sensor data.
Technical Explanation
PlatoNeRF builds on recent advances in neural radiance fields (NeRF) to perform single-view 3D reconstruction using LiDAR data. The key innovation is the use of two-bounce LiDAR reflections to infer the shape and appearance of occluded objects.
The authors first capture LiDAR scans from a single viewpoint, which provide direct measurements of visible surfaces. They then use a neural network to model the 3D scene as a continuous radiance field, leveraging the two-bounce LiDAR reflections to fill in the details of occluded regions.
Specifically, the PlatoNeRF network takes as input the LiDAR point cloud and camera pose, and outputs a volumetric representation of the scene that can be rendered from novel viewpoints. The network is trained end-to-end on synthetic datasets to learn how to efficiently reconstruct 3D geometry and appearance from the limited single-view LiDAR data.
Experiments on benchmark 3D reconstruction datasets show that PlatoNeRF outperforms prior single-view methods, demonstrating the power of leveraging two-bounce LiDAR reflections for inferring occluded scene structure.
Critical Analysis
A key strength of PlatoNeRF is its ability to perform high-quality 3D reconstruction from a single LiDAR viewpoint, which could enable more efficient and practical 3D mapping applications. However, the paper does not provide a comprehensive analysis of the approach's limitations or potential failure cases.
For example, the authors mention that PlatoNeRF relies on the assumption that two-bounce reflections contain useful information about occluded surfaces. But they do not discuss how sensitive the method is to noise, outliers, or other real-world challenges that could degrade the quality of the two-bounce data.
Additionally, the evaluation is focused on static scenes, so it's unclear how well PlatoNeRF would handle dynamic environments or moving objects. Extending the approach to handle such scenarios could be an important area for future research.
Overall, while PlatoNeRF represents an interesting and potentially impactful advance in single-view 3D reconstruction, a more thorough discussion of the approach's limitations and avenues for improvement would help provide a balanced assessment of the work.
Conclusion
PlatoNeRF introduces a novel 3D reconstruction technique that leverages single-view two-bounce LiDAR data to infer the shape and appearance of occluded objects, drawing inspiration from Plato's cave allegory. The authors demonstrate that this approach can outperform previous single-view methods on standard benchmarks, suggesting it could be a valuable tool for applications like autonomous navigation, robotic perception, and 3D mapping.
While the paper presents promising results, a more comprehensive analysis of the approach's limitations and failure cases would help provide a clearer understanding of its practical applicability and guide future research directions. Nonetheless, PlatoNeRF represents an innovative step forward in addressing the challenge of efficient 3D reconstruction from limited sensor data.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
Transient Neural Radiance Fields for Lidar View Synthesis and 3D Reconstruction
Anagh Malik, Parsa Mirdehghan, Sotiris Nousias, Kiriakos N. Kutulakos, David B. Lindell
0
0
Neural radiance fields (NeRFs) have become a ubiquitous tool for modeling scene appearance and geometry from multiview imagery. Recent work has also begun to explore how to use additional supervision from lidar or depth sensor measurements in the NeRF framework. However, previous lidar-supervised NeRFs focus on rendering conventional camera imagery and use lidar-derived point cloud data as auxiliary supervision; thus, they fail to incorporate the underlying image formation model of the lidar. Here, we propose a novel method for rendering transient NeRFs that take as input the raw, time-resolved photon count histograms measured by a single-photon lidar system, and we seek to render such histograms from novel views. Different from conventional NeRFs, the approach relies on a time-resolved version of the volume rendering equation to render the lidar measurements and capture transient light transport phenomena at picosecond timescales. We evaluate our method on a first-of-its-kind dataset of simulated and captured transient multiview scans from a prototype single-photon lidar. Overall, our work brings NeRFs to a new dimension of imaging at transient timescales, newly enabling rendering of transient imagery from novel views. Additionally, we show that our approach recovers improved geometry and conventional appearance compared to point cloud-based supervision when training on few input viewpoints. Transient NeRFs may be especially useful for applications which seek to simulate raw lidar measurements for downstream tasks in autonomous driving, robotics, and remote sensing.
4/9/2024
👨🏫
Depth Supervised Neural Surface Reconstruction from Airborne Imagery
Vincent Hackstein, Paul Fauth-Mayer, Matthias Rothermel, Norbert Haala
0
0
While originally developed for novel view synthesis, Neural Radiance Fields (NeRFs) have recently emerged as an alternative to multi-view stereo (MVS). Triggered by a manifold of research activities, promising results have been gained especially for texture-less, transparent, and reflecting surfaces, while such scenarios remain challenging for traditional MVS-based approaches. However, most of these investigations focus on close-range scenarios, with studies for airborne scenarios still missing. For this task, NeRFs face potential difficulties at areas of low image redundancy and weak data evidence, as often found in street canyons, facades or building shadows. Furthermore, training such networks is computationally expensive. Thus, the aim of our work is twofold: First, we investigate the applicability of NeRFs for aerial image blocks representing different characteristics like nadir-only, oblique and high-resolution imagery. Second, during these investigations we demonstrate the benefit of integrating depth priors from tie-point measures, which are provided during presupposed Bundle Block Adjustment. Our work is based on the state-of-the-art framework VolSDF, which models 3D scenes by signed distance functions (SDFs), since this is more applicable for surface reconstruction compared to the standard volumetric representation in vanilla NeRFs. For evaluation, the NeRF-based reconstructions are compared to results of a publicly available benchmark dataset for airborne images.
4/26/2024

LiDAR4D: Dynamic Neural Fields for Novel Space-time View LiDAR Synthesis
Zehan Zheng, Fan Lu, Weiyi Xue, Guang Chen, Changjun Jiang
0
0
Although neural radiance fields (NeRFs) have achieved triumphs in image novel view synthesis (NVS), LiDAR NVS remains largely unexplored. Previous LiDAR NVS methods employ a simple shift from image NVS methods while ignoring the dynamic nature and the large-scale reconstruction problem of LiDAR point clouds. In light of this, we propose LiDAR4D, a differentiable LiDAR-only framework for novel space-time LiDAR view synthesis. In consideration of the sparsity and large-scale characteristics, we design a 4D hybrid representation combined with multi-planar and grid features to achieve effective reconstruction in a coarse-to-fine manner. Furthermore, we introduce geometric constraints derived from point clouds to improve temporal consistency. For the realistic synthesis of LiDAR point clouds, we incorporate the global optimization of ray-drop probability to preserve cross-region patterns. Extensive experiments on KITTI-360 and NuScenes datasets demonstrate the superiority of our method in accomplishing geometry-aware and time-consistent dynamic reconstruction. Codes are available at https://github.com/ispc-lab/LiDAR4D.
4/4/2024
![Neural radiance fields-based holography [Invited]](https://arxiv.org/html/2403.01137v1/extracted/5444105/fig_outline.jpg)
Neural radiance fields-based holography [Invited]
Minsung Kang, Fan Wang, Kai Kumano, Tomoyoshi Ito, Tomoyoshi Shimobaba
0
0
This study presents a novel approach for generating holograms based on the neural radiance fields (NeRF) technique. Generating three-dimensional (3D) data is difficult in hologram computation. NeRF is a state-of-the-art technique for 3D light-field reconstruction from 2D images based on volume rendering. The NeRF can rapidly predict new-view images that do not include a training dataset. In this study, we constructed a rendering pipeline directly from a 3D light field generated from 2D images by NeRF for hologram generation using deep neural networks within a reasonable time. The pipeline comprises three main components: the NeRF, a depth predictor, and a hologram generator, all constructed using deep neural networks. The pipeline does not include any physical calculations. The predicted holograms of a 3D scene viewed from any direction were computed using the proposed pipeline. The simulation and experimental results are presented.
5/13/2024