PLoc: A New Evaluation Criterion Based on Physical Location for Autonomous Driving Datasets
2403.19893
0
0

Abstract
Autonomous driving has garnered significant attention as a key research area within artificial intelligence. In the context of autonomous driving scenarios, the varying physical locations of objects correspond to different levels of danger. However, conventional evaluation criteria for automatic driving object detection often overlook the crucial aspect of an object's physical location, leading to evaluation results that may not accurately reflect the genuine threat posed by the object to the autonomous driving vehicle. To enhance the safety of autonomous driving, this paper introduces a novel evaluation criterion based on physical location information, termed PLoc. This criterion transcends the limitations of traditional criteria by acknowledging that the physical location of pedestrians in autonomous driving scenarios can provide valuable safety-related information. Furthermore, this paper presents a newly re-annotated dataset (ApolloScape-R) derived from ApolloScape. ApolloScape-R involves the relabeling of pedestrians based on the significance of their physical location. The dataset is utilized to assess the performance of various object detection models under the proposed PLoc criterion. Experimental results demonstrate that the average accuracy of all object detection models in identifying a person situated in the travel lane of an autonomous vehicle is lower than that for a person on a sidewalk. The dataset is publicly available at https://github.com/lnyrlyed/ApolloScape-R.git
Create account to get full access
Overview
- This paper introduces a new evaluation metric called PLoc (Physical Location) for assessing the performance of object detection models used in autonomous driving datasets.
- The key idea is that the physical location of detected objects is important for autonomous driving, not just their bounding boxes or classifications.
- The paper demonstrates that existing metrics like COCO do not fully capture this physical location aspect, and proposes PLoc as a more relevant evaluation criterion.
Plain English Explanation
The paper focuses on evaluating how well object detection models perform in the context of autonomous driving. In self-driving cars, it's not just important to correctly identify and classify objects like cars, pedestrians, and traffic signals - it's also crucial to know exactly where those objects are located in physical space around the vehicle.
Existing evaluation metrics like COCO, which measure things like bounding box accuracy and classification, don't fully capture this physical location aspect. The researchers argue that a new metric called PLoc, which directly assesses the detected objects' positions relative to the car, provides a more meaningful way to benchmark these models for autonomous driving applications.
Imagine you're training an object detection system for a self-driving car. The current metrics would tell you how well the system can draw boxes around things and label them correctly. But the PLoc metric goes further, checking if the system accurately pinpoints where those detected objects are in the real world around the vehicle. This extra location information is critical for the car to safely navigate and respond to its environment.
Technical Explanation
The paper first reviews existing object detection evaluation metrics like COCO, which focus on bounding box accuracy and classification performance. The authors argue these don't fully capture the unique needs of autonomous driving, where physical object location is paramount.
They then introduce the PLoc (Physical Location) metric, which measures the offset between the detected object's position and its true position relative to the autonomous vehicle. PLoc calculates this offset in 3D space, taking into account the object's distance from the car as well as its lateral and vertical displacement.
To demonstrate the value of PLoc, the researchers evaluate several popular object detectors on autonomous driving datasets. They show that models can achieve strong COCO-style scores but have much lower PLoc performance, indicating limitations in truly localizing objects in the physical environment.
The paper also explores factors that affect PLoc, such as object size and occlusion. It provides insights into how object detection architectures and training data can be improved to enhance physical localization for self-driving applications.
Critical Analysis
The researchers make a compelling case for the importance of physical object localization in autonomous driving and the limitations of existing evaluation metrics. PLoc appears to be a valuable new criterion that can provide a more holistic assessment of object detection performance in this domain.
However, the paper does not address some potential caveats. For example, it's unclear how sensitive PLoc is to sensor calibration, environmental conditions, or other factors that can affect the accuracy of 3D position estimation. Additionally, the analysis focuses on static 2D object detection, whereas real-world autonomous driving also requires accurate tracking and motion prediction.
Further research could explore the trade-offs between maximizing PLoc and other key performance attributes like runtime efficiency. It would also be helpful to understand how PLoc scores correlate with real-world driving safety and performance.
Overall, this work highlights an important limitation in current autonomous driving benchmarks and introduces a thoughtful new evaluation criterion. Continued refinement and validation of PLoc could lead to object detection systems that are better aligned with the unique needs of self-driving vehicles.
Conclusion
This paper proposes a new evaluation metric called PLoc that focuses on the physical localization of objects detected by autonomous driving models, rather than just their classification and bounding box accuracy. The authors demonstrate that existing metrics like COCO do not fully capture this critical aspect of performance for self-driving applications.
By directly measuring the 3D offset between detected and ground truth object positions, PLoc provides a more relevant benchmark for assessing the suitability of object detectors for autonomous driving. The research insights highlight opportunities to improve model architectures and training to enhance physical localization capabilities.
Overall, the introduction of PLoc represents an important step towards developing safer and more reliable self-driving systems, where precisely knowing the positions of surrounding objects is essential for making informed navigational decisions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤖
USC: Uncompromising Spatial Constraints for Safety-Oriented 3D Object Detectors in Autonomous Driving
Brian Hsuan-Cheng Liao, Chih-Hong Cheng, Hasan Esen, Alois Knoll
0
0
We consider the safety-oriented performance of 3D object detectors in autonomous driving contexts. Specifically, despite impressive results shown by the mass literature, developers often find it hard to ensure the safe deployment of these learning-based perception models. Attributing the challenge to the lack of safety-oriented metrics, we hereby present uncompromising spatial constraints (USC), which characterize a simple yet important localization requirement demanding the predictions to fully cover the objects when seen from the autonomous vehicle. The constraints, as we formulate using the perspective and bird's-eye views, can be naturally reflected by quantitative measures, such that having an object detector with a higher score implies a lower risk of collision. Finally, beyond model evaluation, we incorporate the quantitative measures into common loss functions to enable safety-oriented fine-tuning for existing models. With experiments using the nuScenes dataset and a closed-loop simulation, our work demonstrates such considerations of safety notions at the perception level not only improve model performances beyond accuracy but also allow for a more direct linkage to actual system safety.
5/3/2024
ControlLoc: Physical-World Hijacking Attack on Visual Perception in Autonomous Driving
Chen Ma, Ningfei Wang, Zhengyu Zhao, Qian Wang, Qi Alfred Chen, Chao Shen
0
0
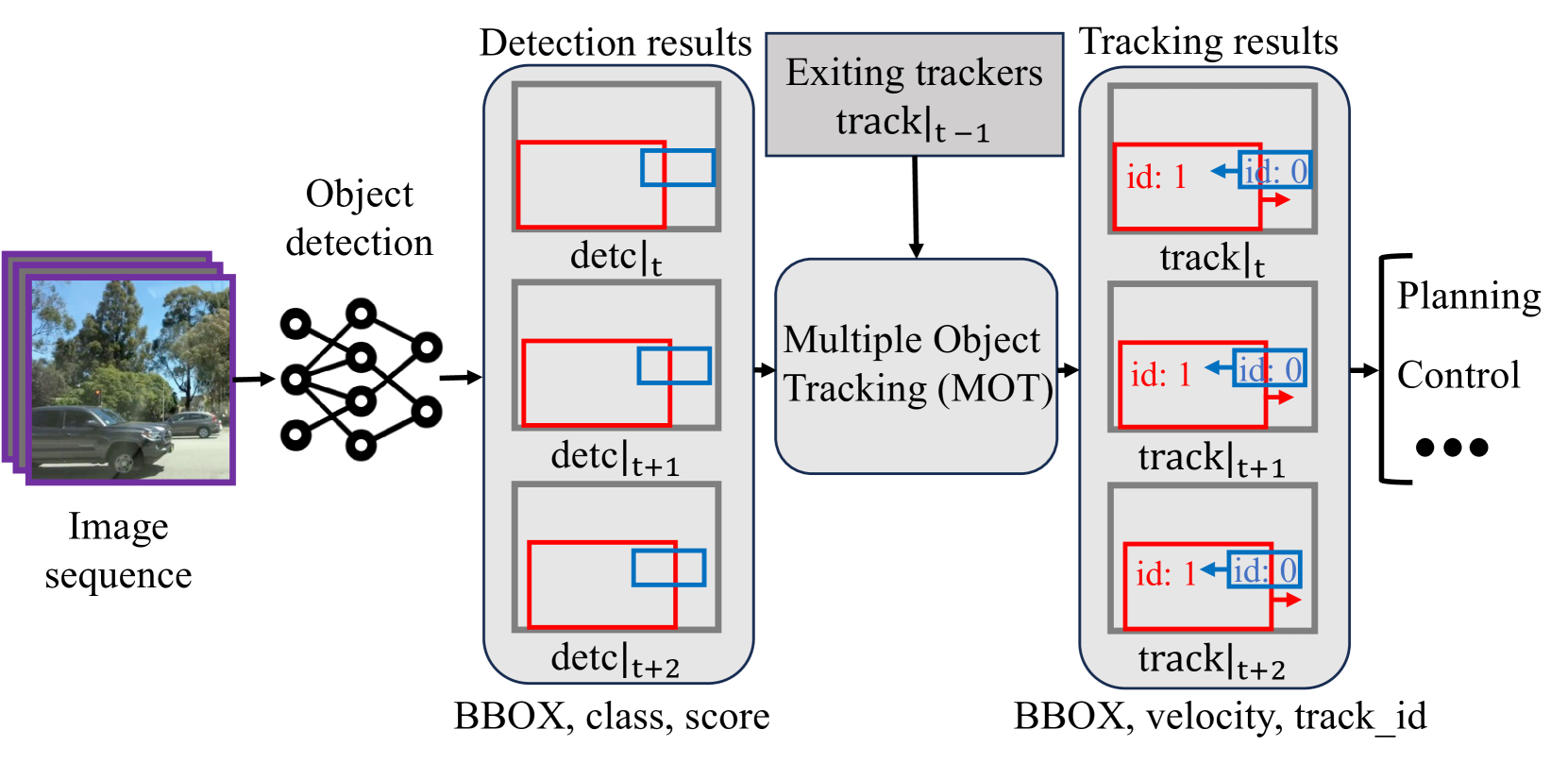
Recent research in adversarial machine learning has focused on visual perception in Autonomous Driving (AD) and has shown that printed adversarial patches can attack object detectors. However, it is important to note that AD visual perception encompasses more than just object detection; it also includes Multiple Object Tracking (MOT). MOT enhances the robustness by compensating for object detection errors and requiring consistent object detection results across multiple frames before influencing tracking results and driving decisions. Thus, MOT makes attacks on object detection alone less effective. To attack such robust AD visual perception, a digital hijacking attack has been proposed to cause dangerous driving scenarios. However, this attack has limited effectiveness. In this paper, we introduce a novel physical-world adversarial patch attack, ControlLoc, designed to exploit hijacking vulnerabilities in entire AD visual perception. ControlLoc utilizes a two-stage process: initially identifying the optimal location for the adversarial patch, and subsequently generating the patch that can modify the perceived location and shape of objects with the optimal location. Extensive evaluations demonstrate the superior performance of ControlLoc, achieving an impressive average attack success rate of around 98.1% across various AD visual perceptions and datasets, which is four times greater effectiveness than the existing hijacking attack. The effectiveness of ControlLoc is further validated in physical-world conditions, including real vehicle tests under different conditions such as outdoor light conditions with an average attack success rate of 77.5%. AD system-level impact assessments are also included, such as vehicle collision, using industry-grade AD systems and production-grade AD simulators with an average vehicle collision rate and unnecessary emergency stop rate of 81.3%.
6/11/2024

Object criticality for safer navigation
Andrea Ceccarelli, Leonardo Montecchi
0
0
Object detection in autonomous driving consists in perceiving and locating instances of objects in multi-dimensional data, such as images or lidar scans. Very recently, multiple works are proposing to evaluate object detectors by measuring their ability to detect the objects that are most likely to interfere with the driving task. Detectors are then ranked according to their ability to detect the most relevant objects, rather than the highest number of objects. However there is little evidence so far that the relevance of predicted object may contribute to the safety and reliability improvement of the driving task. This position paper elaborates on a strategy, together with partial results, to i) configure and deploy object detectors that successfully extract knowledge on object relevance, and ii) use such knowledge to improve the trajectory planning task. We show that, given an object detector, filtering objects based on their relevance, in combination with the traditional confidence threshold, reduces the risk of missing relevant objects, decreases the likelihood of dangerous trajectories, and improves the quality of trajectories in general.
6/18/2024

A First Physical-World Trajectory Prediction Attack via LiDAR-induced Deceptions in Autonomous Driving
Yang Lou, Yi Zhu, Qun Song, Rui Tan, Chunming Qiao, Wei-Bin Lee, Jianping Wang
0
0
Trajectory prediction forecasts nearby agents' moves based on their historical trajectories. Accurate trajectory prediction is crucial for autonomous vehicles. Existing attacks compromise the prediction model of a victim AV by directly manipulating the historical trajectory of an attacker AV, which has limited real-world applicability. This paper, for the first time, explores an indirect attack approach that induces prediction errors via attacks against the perception module of a victim AV. Although it has been shown that physically realizable attacks against LiDAR-based perception are possible by placing a few objects at strategic locations, it is still an open challenge to find an object location from the vast search space in order to launch effective attacks against prediction under varying victim AV velocities. Through analysis, we observe that a prediction model is prone to an attack focusing on a single point in the scene. Consequently, we propose a novel two-stage attack framework to realize the single-point attack. The first stage of prediction-side attack efficiently identifies, guided by the distribution of detection results under object-based attacks against perception, the state perturbations for the prediction model that are effective and velocity-insensitive. In the second stage of location matching, we match the feasible object locations with the found state perturbations. Our evaluation using a public autonomous driving dataset shows that our attack causes a collision rate of up to 63% and various hazardous responses of the victim AV. The effectiveness of our attack is also demonstrated on a real testbed car. To the best of our knowledge, this study is the first security analysis spanning from LiDAR-based perception to prediction in autonomous driving, leading to a realistic attack on prediction. To counteract the proposed attack, potential defenses are discussed.
6/18/2024