Scale-Invariant Feature Disentanglement via Adversarial Learning for UAV-based Object Detection
2405.15465
0
0
✨
Abstract
Detecting objects from Unmanned Aerial Vehicles (UAV) is often hindered by a large number of small objects, resulting in low detection accuracy. To address this issue, mainstream approaches typically utilize multi-stage inferences. Despite their remarkable detecting accuracies, real-time efficiency is sacrificed, making them less practical to handle real applications. To this end, we propose to improve the single-stage inference accuracy through learning scale-invariant features. Specifically, a Scale-Invariant Feature Disentangling module is designed to disentangle scale-related and scale-invariant features. Then an Adversarial Feature Learning scheme is employed to enhance disentanglement. Finally, scale-invariant features are leveraged for robust UAV-based object detection. Furthermore, we construct a multi-modal UAV object detection dataset, State-Air, which incorporates annotated UAV state parameters. We apply our approach to three state-of-the-art lightweight detection frameworks on three benchmark datasets, including State-Air. Extensive experiments demonstrate that our approach can effectively improve model accuracy. Our code and dataset are provided in Supplementary Materials and will be publicly available once the paper is accepted.
Create account to get full access
Overview
- This blog post provides a plain English summary of a technical research paper on drone safety and object detection.
- The paper explores various approaches to ensuring the safety of unmanned aerial vehicles (UAVs) and improving object detection capabilities in multi-modal environments.
- Key topics covered include ensuring-uav-safety-vision-only-real-time, c2fdrone-coarse-to-fine-drone-to-drone, learning-feature-inversion-multi-class-anomaly-detection, multimodal-3d-object-detection-unseen-domains, and soar-advancements-small-body-object-detection-aerial.
Plain English Explanation
The research explores ways to make drones safer and better at detecting objects, even in challenging environments. One approach focuses on using cameras and sensors to help drones avoid obstacles and collisions in real-time. Another looks at how drones can work together to improve their object detection capabilities, starting with a coarse scan and then zooming in for a closer look.
The researchers also investigate using machine learning techniques to identify anomalies or unusual objects that could pose a safety risk. And they explore using multiple types of sensors, like cameras and depth scanners, to improve 3D object detection, even in situations where the objects haven't been seen before.
Finally, the paper discusses advancements in detecting small objects from the air, which is important for applications like drone delivery or inspection. The key ideas are about making drones smarter, safer, and better able to navigate and understand their surroundings, which has implications for a wide range of drone use cases.
Technical Explanation
The paper explores several technical approaches to improving drone safety and object detection. One method, ensuring-uav-safety-vision-only-real-time, uses only visual information from cameras to help drones detect and avoid obstacles in real-time. This is important for drones operating in crowded or unpredictable environments.
Another approach, c2fdrone-coarse-to-fine-drone-to-drone, involves multiple drones working together, with one drone doing a quick, coarse scan to identify potential objects of interest, then directing another drone to take a closer, more detailed look. This allows the drones to efficiently cover a large area and improve their object detection capabilities.
The paper also presents learning-feature-inversion-multi-class-anomaly-detection, a machine learning technique for identifying unusual or anomalous objects that could pose safety risks. By learning the expected features of normal objects, the system can detect when something out of the ordinary appears.
In multimodal-3d-object-detection-unseen-domains, the researchers explore using multiple sensor modalities, like cameras and depth scanners, to improve 3D object detection, even for objects that the system hasn't encountered before. This is important for drones operating in diverse environments.
Finally, the paper discusses soar-advancements-small-body-object-detection-aerial, which focuses on improving the detection of small objects from the air. This is a critical capability for applications like drone delivery or infrastructure inspection.
Critical Analysis
The paper presents promising technical approaches to improving drone safety and object detection, but it also acknowledges several limitations and areas for further research. For example, the vision-only obstacle avoidance method may struggle in low-visibility conditions, and the multi-drone approach requires reliable communication between the drones.
Additionally, the anomaly detection system relies on learning the expected features of "normal" objects, which may not be straightforward in complex, dynamic environments. And while the multimodal 3D object detection shows improvements, further work is needed to make it truly robust to unseen objects and domains.
Finally, the small object detection approach is an important advancement, but it may still face challenges in accurately identifying and tracking very small or distant objects from the air. Continued research and testing in real-world scenarios will be crucial to address these limitations.
Conclusion
Overall, this paper presents a range of technical innovations aimed at making drones safer and more capable of perceiving and understanding their surroundings. By combining approaches like vision-based obstacle avoidance, collaborative multi-drone sensing, anomaly detection, and multimodal 3D object recognition, the researchers are working to expand the capabilities of UAVs and unlock new applications.
While there are still some challenges to overcome, the insights and advancements discussed in this paper have the potential to significantly improve the safety and reliability of drone technology, which could lead to broader adoption and novel use cases that benefit society.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

UCDNet: Multi-UAV Collaborative 3D Object Detection Network by Reliable Feature Mapping
Pengju Tian, Peirui Cheng, Yuchao Wang, Zhechao Wang, Zhirui Wang, Menglong Yan, Xue Yang, Xian Sun
0
0
Multi-UAV collaborative 3D object detection can perceive and comprehend complex environments by integrating complementary information, with applications encompassing traffic monitoring, delivery services and agricultural management. However, the extremely broad observations in aerial remote sensing and significant perspective differences across multiple UAVs make it challenging to achieve precise and consistent feature mapping from 2D images to 3D space in multi-UAV collaborative 3D object detection paradigm. To address the problem, we propose an unparalleled camera-based multi-UAV collaborative 3D object detection paradigm called UCDNet. Specifically, the depth information from the UAVs to the ground is explicitly utilized as a strong prior to provide a reference for more accurate and generalizable feature mapping. Additionally, we design a homologous points geometric consistency loss as an auxiliary self-supervision, which directly influences the feature mapping module, thereby strengthening the global consistency of multi-view perception. Experiments on AeroCollab3D and CoPerception-UAVs datasets show our method increases 4.7% and 10% mAP respectively compared to the baseline, which demonstrates the superiority of UCDNet.
6/10/2024
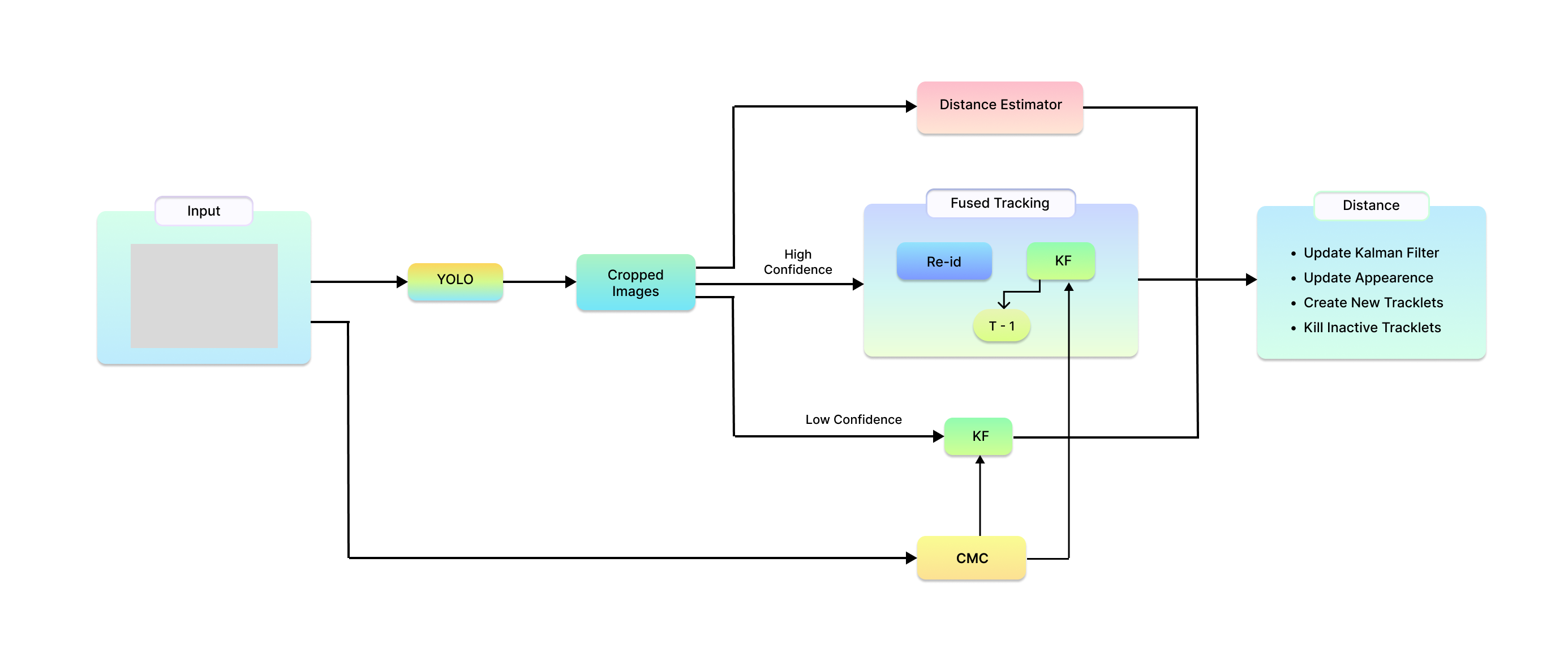
Ensuring UAV Safety: A Vision-only and Real-time Framework for Collision Avoidance Through Object Detection, Tracking, and Distance Estimation
Vasileios Karampinis, Anastasios Arsenos, Orfeas Filippopoulos, Evangelos Petrongonas, Christos Skliros, Dimitrios Kollias, Stefanos Kollias, Athanasios Voulodimos
0
0
In the last twenty years, unmanned aerial vehicles (UAVs) have garnered growing interest due to their expanding applications in both military and civilian domains. Detecting non-cooperative aerial vehicles with efficiency and estimating collisions accurately are pivotal for achieving fully autonomous aircraft and facilitating Advanced Air Mobility (AAM). This paper presents a deep-learning framework that utilizes optical sensors for the detection, tracking, and distance estimation of non-cooperative aerial vehicles. In implementing this comprehensive sensing framework, the availability of depth information is essential for enabling autonomous aerial vehicles to perceive and navigate around obstacles. In this work, we propose a method for estimating the distance information of a detected aerial object in real time using only the input of a monocular camera. In order to train our deep learning components for the object detection, tracking and depth estimation tasks we utilize the Amazon Airborne Object Tracking (AOT) Dataset. In contrast to previous approaches that integrate the depth estimation module into the object detector, our method formulates the problem as image-to-image translation. We employ a separate lightweight encoder-decoder network for efficient and robust depth estimation. In a nutshell, the object detection module identifies and localizes obstacles, conveying this information to both the tracking module for monitoring obstacle movement and the depth estimation module for calculating distances. Our approach is evaluated on the Airborne Object Tracking (AOT) dataset which is the largest (to the best of our knowledge) air-to-air airborne object dataset.
5/17/2024

Model Agnostic Defense against Adversarial Patch Attacks on Object Detection in Unmanned Aerial Vehicles
Saurabh Pathak, Samridha Shrestha, Abdelrahman AlMahmoud
0
0
Object detection forms a key component in Unmanned Aerial Vehicles (UAVs) for completing high-level tasks that depend on the awareness of objects on the ground from an aerial perspective. In that scenario, adversarial patch attacks on an onboard object detector can severely impair the performance of upstream tasks. This paper proposes a novel model-agnostic defense mechanism against the threat of adversarial patch attacks in the context of UAV-based object detection. We formulate adversarial patch defense as an occlusion removal task. The proposed defense method can neutralize adversarial patches located on objects of interest, without exposure to adversarial patches during training. Our lightweight single-stage defense approach allows us to maintain a model-agnostic nature, that once deployed does not require to be updated in response to changes in the object detection pipeline. The evaluations in digital and physical domains show the feasibility of our method for deployment in UAV object detection pipelines, by significantly decreasing the Attack Success Ratio without incurring significant processing costs. As a result, the proposed defense solution can improve the reliability of object detection for UAVs.
5/30/2024
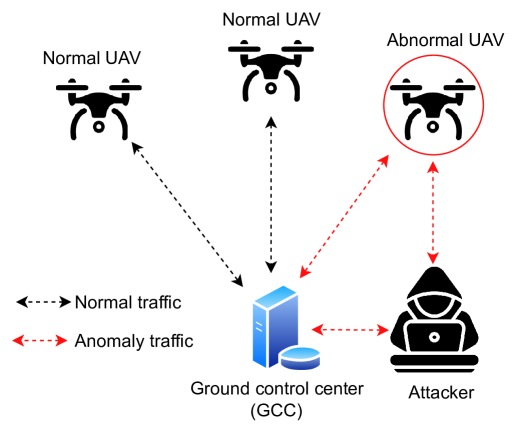
Enhanced Intrusion Detection System for Multiclass Classification in UAV Networks
Safaa Menssouri, Mamady Delamou, Khalil Ibrahimi, El Mehdi Amhoud
0
0
Unmanned Aerial Vehicles (UAVs) have become increasingly popular in various applications, especially with the emergence of 6G systems and networks. However, their widespread adoption has also led to concerns regarding security vulnerabilities, making the development of reliable intrusion detection systems (IDS) essential for ensuring UAVs safety and mission success. This paper presents a new IDS for UAV networks. A binary-tuple representation was used for encoding class labels, along with a deep learning-based approach employed for classification. The proposed system enhances the intrusion detection by capturing complex class relationships and temporal network patterns. Moreover, a cross-correlation study between common features of different UAVs was conducted to discard correlated features that might mislead the classification of the proposed IDS. The full study was carried out using the UAV-IDS-2020 dataset, and we assessed the performance of the proposed IDS using different evaluation metrics. The experimental results highlighted the effectiveness of the proposed multiclass classifier model with an accuracy of 95%.
6/18/2024