3DGS-Calib: 3D Gaussian Splatting for Multimodal SpatioTemporal Calibration

0

Sign in to get full access
Overview
- The paper presents a method called 3DGS-Calib for multimodal spatiotemporal calibration using 3D Gaussian splatting.
- It addresses the challenge of calibrating multiple sensors with different modalities (e.g. cameras, LiDAR) in time and space.
- The proposed technique uses 3D Gaussian splatting to represent sensor data in a joint spatiotemporal representation, enabling robust calibration.
Plain English Explanation
In many robotic and autonomous systems, multiple sensors like cameras and LiDAR are used to perceive the environment. To effectively combine the data from these different sensors, they need to be properly calibrated in both space and time. 3DGS-Calib is a method that tackles this calibration problem.
The key idea is to represent the sensor data using 3D Gaussian "splatts" that capture both the spatial and temporal information. This allows the system to find the optimal alignment between the different sensor modalities by minimizing the overlap between their Gaussian splatts. The calibration is done in an iterative optimization process that gradually refines the alignment.
This 3D Gaussian splatting approach has several advantages over traditional calibration techniques. It can handle sensors with different measurement frequencies and different modalities, making it more versatile. It is also more robust to noise and outliers in the sensor data, leading to more accurate calibration results.
Technical Explanation
The 3DGS-Calib method represents sensor data as 3D Gaussian splatts in a joint spatiotemporal space. Each splatt encodes the position and timestamp of a measurement from a sensor.
The calibration process involves iteratively optimizing the alignment of these Gaussian splatts between the different sensor modalities. This is done by minimizing a cost function that measures the overlap between the splatts. The optimization updates the estimated transformation parameters (rotation, translation, and time offset) between the sensor coordinate frames.
The paper also introduces several extensions to the 3DGS-Calib method, including:
- Acceleration-Aware Splatting: Incorporating sensor motion information to better model the splatt shapes.
- Robust 3DGS-Calib: Using a robust loss function to handle outliers in the sensor data.
- Batch 3DGS-Calib: Optimizing the calibration parameters over a batch of sensor data for improved accuracy.
Extensive experiments on both synthetic and real-world datasets demonstrate the effectiveness of the 3DGS-Calib method in calibrating a wide range of sensor modalities, including cameras, LiDAR, and IMUs.
Critical Analysis
The 3DGS-Calib paper presents a novel and promising approach to the challenging problem of multimodal spatiotemporal calibration. The 3D Gaussian splatting representation and the iterative optimization-based calibration process demonstrate robust performance on various sensor configurations.
However, the paper does not address some potential limitations of the method. For example, the calibration process assumes that the sensor motion can be accurately estimated, which may not always be the case, especially for low-cost sensors. Additionally, the method may be sensitive to the initial calibration parameters, and the convergence of the optimization process could be slower for complex sensor setups.
Further research could explore ways to make the calibration more robust to imperfect motion estimates, as well as techniques to improve the optimization process's convergence speed and scalability to larger sensor networks.
Conclusion
The 3DGS-Calib paper presents a novel approach to multimodal spatiotemporal calibration using 3D Gaussian splatting. By representing sensor data in a joint spatiotemporal space, the method can effectively align different sensor modalities, even with varying measurement frequencies.
The proposed techniques, including acceleration-aware splatting, robust loss functions, and batch optimization, demonstrate significant improvements over traditional calibration methods. This work has important implications for the development of robust and reliable multi-sensor systems in various applications, such as autonomous vehicles, robotics, and augmented reality.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!3DGS-Calib: 3D Gaussian Splatting for Multimodal SpatioTemporal Calibration
Quentin Herau, Moussab Bennehar, Arthur Moreau, Nathan Piasco, Luis Roldao, Dzmitry Tsishkou, Cyrille Migniot, Pascal Vasseur, C'edric Demonceaux
Reliable multimodal sensor fusion algorithms require accurate spatiotemporal calibration. Recently, targetless calibration techniques based on implicit neural representations have proven to provide precise and robust results. Nevertheless, such methods are inherently slow to train given the high computational overhead caused by the large number of sampled points required for volume rendering. With the recent introduction of 3D Gaussian Splatting as a faster alternative to implicit representation methods, we propose to leverage this new rendering approach to achieve faster multi-sensor calibration. We introduce 3DGS-Calib, a new calibration method that relies on the speed and rendering accuracy of 3D Gaussian Splatting to achieve multimodal spatiotemporal calibration that is accurate, robust, and with a substantial speed-up compared to methods relying on implicit neural representations. We demonstrate the superiority of our proposal with experimental results on sequences from KITTI-360, a widely used driving dataset.
Read more9/19/2024

0
Towards Real-Time Gaussian Splatting: Accelerating 3DGS through Photometric SLAM
Yan Song Hu, Dayou Mao, Yuhao Chen, John Zelek
Initial applications of 3D Gaussian Splatting (3DGS) in Visual Simultaneous Localization and Mapping (VSLAM) demonstrate the generation of high-quality volumetric reconstructions from monocular video streams. However, despite these promising advancements, current 3DGS integrations have reduced tracking performance and lower operating speeds compared to traditional VSLAM. To address these issues, we propose integrating 3DGS with Direct Sparse Odometry, a monocular photometric SLAM system. We have done preliminary experiments showing that using Direct Sparse Odometry point cloud outputs, as opposed to standard structure-from-motion methods, significantly shortens the training time needed to achieve high-quality renders. Reducing 3DGS training time enables the development of 3DGS-integrated SLAM systems that operate in real-time on mobile hardware. These promising initial findings suggest further exploration is warranted in combining traditional VSLAM systems with 3DGS.
Read more8/9/2024
0
Gaussian Splatting SLAM
Hidenobu Matsuki, Riku Murai, Paul H. J. Kelly, Andrew J. Davison
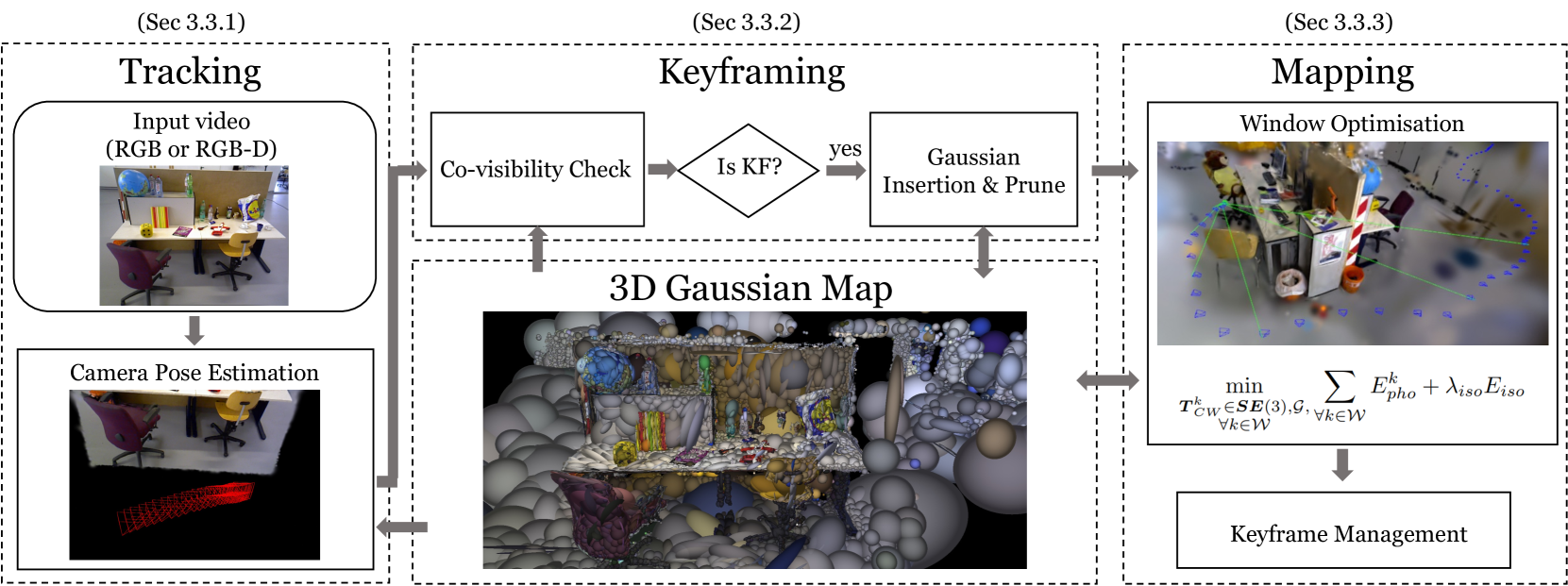
We present the first application of 3D Gaussian Splatting in monocular SLAM, the most fundamental but the hardest setup for Visual SLAM. Our method, which runs live at 3fps, utilises Gaussians as the only 3D representation, unifying the required representation for accurate, efficient tracking, mapping, and high-quality rendering. Designed for challenging monocular settings, our approach is seamlessly extendable to RGB-D SLAM when an external depth sensor is available. Several innovations are required to continuously reconstruct 3D scenes with high fidelity from a live camera. First, to move beyond the original 3DGS algorithm, which requires accurate poses from an offline Structure from Motion (SfM) system, we formulate camera tracking for 3DGS using direct optimisation against the 3D Gaussians, and show that this enables fast and robust tracking with a wide basin of convergence. Second, by utilising the explicit nature of the Gaussians, we introduce geometric verification and regularisation to handle the ambiguities occurring in incremental 3D dense reconstruction. Finally, we introduce a full SLAM system which not only achieves state-of-the-art results in novel view synthesis and trajectory estimation but also reconstruction of tiny and even transparent objects.
Read more4/16/2024
🗣️
0
GS-SLAM: Dense Visual SLAM with 3D Gaussian Splatting
Chi Yan, Delin Qu, Dan Xu, Bin Zhao, Zhigang Wang, Dong Wang, Xuelong Li
In this paper, we introduce textbf{GS-SLAM} that first utilizes 3D Gaussian representation in the Simultaneous Localization and Mapping (SLAM) system. It facilitates a better balance between efficiency and accuracy. Compared to recent SLAM methods employing neural implicit representations, our method utilizes a real-time differentiable splatting rendering pipeline that offers significant speedup to map optimization and RGB-D rendering. Specifically, we propose an adaptive expansion strategy that adds new or deletes noisy 3D Gaussians in order to efficiently reconstruct new observed scene geometry and improve the mapping of previously observed areas. This strategy is essential to extend 3D Gaussian representation to reconstruct the whole scene rather than synthesize a static object in existing methods. Moreover, in the pose tracking process, an effective coarse-to-fine technique is designed to select reliable 3D Gaussian representations to optimize camera pose, resulting in runtime reduction and robust estimation. Our method achieves competitive performance compared with existing state-of-the-art real-time methods on the Replica, TUM-RGBD datasets. Project page: https://gs-slam.github.io/.
Read more4/9/2024