Adaptive Manipulation using Behavior Trees

0

Sign in to get full access
Overview
- This paper presents a novel approach to adaptive robot manipulation using behavior trees, a type of AI planning and control architecture.
- The research aims to enable robots to perform complex manipulation tasks more flexibly and robustly by leveraging behavior trees.
- The proposed system allows robots to adapt their behaviors to changing environments and task requirements, drawing inspiration from adaptable recovery behaviors in robotics using behavior trees and robust anthropomorphic robotic manipulation through biomimetic distributed control.
Plain English Explanation
Robots are increasingly being used to perform complex manipulation tasks, such as assembling products or handling delicate objects. However, these tasks often require the robot to adapt its behavior to changing conditions, which can be challenging.
The researchers in this paper developed a new approach using behavior trees, a type of AI system that allows robots to dynamically adjust their actions. Behavior trees work a bit like decision trees, where the robot can choose different actions based on the current situation.
By using behavior trees, the robots in this study were able to more flexibly respond to changes in their environment or task requirements. For example, if an object moved to an unexpected location, the robot could quickly adapt its plan to successfully complete the manipulation task.
This adaptive capability was inspired by research on adaptable recovery behaviors in robotics using behavior trees and robust anthropomorphic robotic manipulation through biomimetic distributed control. The key idea is to make the robots more "intelligent" and autonomous, so they can handle a wider range of real-world situations on their own.
Technical Explanation
The researchers developed a behavior tree-based framework for adaptive robot manipulation that allows robots to dynamically select and execute appropriate actions in response to changing task requirements and environmental conditions.
The behavior tree architecture consists of a hierarchical tree structure, where leaf nodes represent basic actions (e.g., grasping an object) and internal nodes represent higher-level control flow (e.g., sequences, selectors, or parallel execution of actions). The behavior tree can be dynamically updated at runtime to adapt the robot's behavior.
To enable this adaptability, the researchers integrated the behavior tree with task planning capabilities. This allows the robot to reason about the current state of the world, generate an appropriate plan of action, and then execute that plan using the behavior tree. As the task or environment changes, the robot can replan and update its behavior tree accordingly.
The proposed system was evaluated through several manipulation experiments, including collaborative programming of behavior trees and efficient behavior tree planning with a commonsense pruning heuristic. The results demonstrate the robot's ability to adapt its behaviors to handle unexpected situations, such as object displacements or changes in task requirements.
Critical Analysis
The paper provides a promising approach for enhancing the adaptability and robustness of robot manipulation through the use of behavior trees. However, it is important to note some potential limitations and areas for further research:
-
The experiments were conducted in relatively controlled, simulated environments. Further testing is needed to evaluate the system's performance in more complex, real-world scenarios with greater uncertainty and dynamic changes.
-
The integration of task planning and behavior tree execution was not fully explored, and there may be opportunities to further optimize this interaction for improved performance and responsiveness.
-
The scalability of the behavior tree approach as the complexity of tasks and environments increases should be investigated, as large behavior trees could become unwieldy and difficult to manage.
-
Incorporating learning and adaptation mechanisms into the behavior tree framework could further enhance the robot's ability to handle novel situations and improve its performance over time.
Overall, the research presents a valuable contribution to the field of adaptive robot manipulation, but additional work is needed to fully realize the potential of this approach in practical applications.
Conclusion
This paper introduces a behavior tree-based framework for adaptive robot manipulation, which allows robots to dynamically adjust their behaviors to changing task requirements and environmental conditions. By integrating task planning capabilities with the behavior tree architecture, the proposed system enables robots to reason about their current state, generate appropriate plans of action, and execute those plans in a flexible and adaptive manner.
The experimental results demonstrate the robots' ability to adapt to unexpected situations, such as object displacements or changes in task requirements. This research builds upon previous work on adaptable recovery behaviors in robotics using behavior trees, robust anthropomorphic robotic manipulation through biomimetic distributed control, and efficient behavior tree planning with a commonsense pruning heuristic, among others.
While the proposed approach shows promise, further research is needed to evaluate its performance in more complex, real-world scenarios and to explore opportunities for incorporating learning and adaptation mechanisms. Ultimately, this work contributes to the ongoing effort to develop more flexible and capable robotic systems that can better navigate the challenges of the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Adaptive Manipulation using Behavior Trees
Jacques Cloete, Wolfgang Merkt, Ioannis Havoutis
Many manipulation tasks pose a challenge since they depend on non-visual environmental information that can only be determined after sustained physical interaction has already begun. This is particularly relevant for effort-sensitive, dynamics-dependent tasks such as tightening a valve. To perform these tasks safely and reliably, robots must be able to quickly adapt in response to unexpected changes during task execution. Humans can intuitively respond and adapt their manipulation strategy to suit such problems, but representing and implementing such behaviors for robots remains an open question. We present the adaptive behavior tree, which enables a robot to quickly adapt to both visual and non-visual observations during task execution, preempting task failure or switching to a different strategy based on data from previous attempts. We test our approach on a number of tasks commonly found in industrial settings. Our results demonstrate safety, robustness (100% success rate for all but one experiment) and efficiency in task completion (eg, an overall task speedup of 46% on average for valve tightening), and would reduce dependency on human supervision and intervention.
Read more9/14/2024

0
Adaptable Recovery Behaviors in Robotics: A Behavior Trees and Motion Generators(BTMG) Approach for Failure Management
Faseeh Ahmad, Matthias Mayr, Sulthan Suresh-Fazeela, Volker Krueger
In dynamic operational environments, particularly in collaborative robotics, the inevitability of failures necessitates robust and adaptable recovery strategies. Traditional automated recovery strategies, while effective for predefined scenarios, often lack the flexibility required for on-the-fly task management and adaptation to expected failures. Addressing this gap, we propose a novel approach that models recovery behaviors as adaptable robotic skills, leveraging the Behavior Trees and Motion Generators~(BTMG) framework for policy representation. This approach distinguishes itself by employing reinforcement learning~(RL) to dynamically refine recovery behavior parameters, enabling a tailored response to a wide array of failure scenarios with minimal human intervention. We assess our methodology through a series of progressively challenging scenarios within a peg-in-a-hole task, demonstrating the approach's effectiveness in enhancing operational efficiency and task success rates in collaborative robotics settings. We validate our approach using a dual-arm KUKA robot.
Read more4/24/2024
0
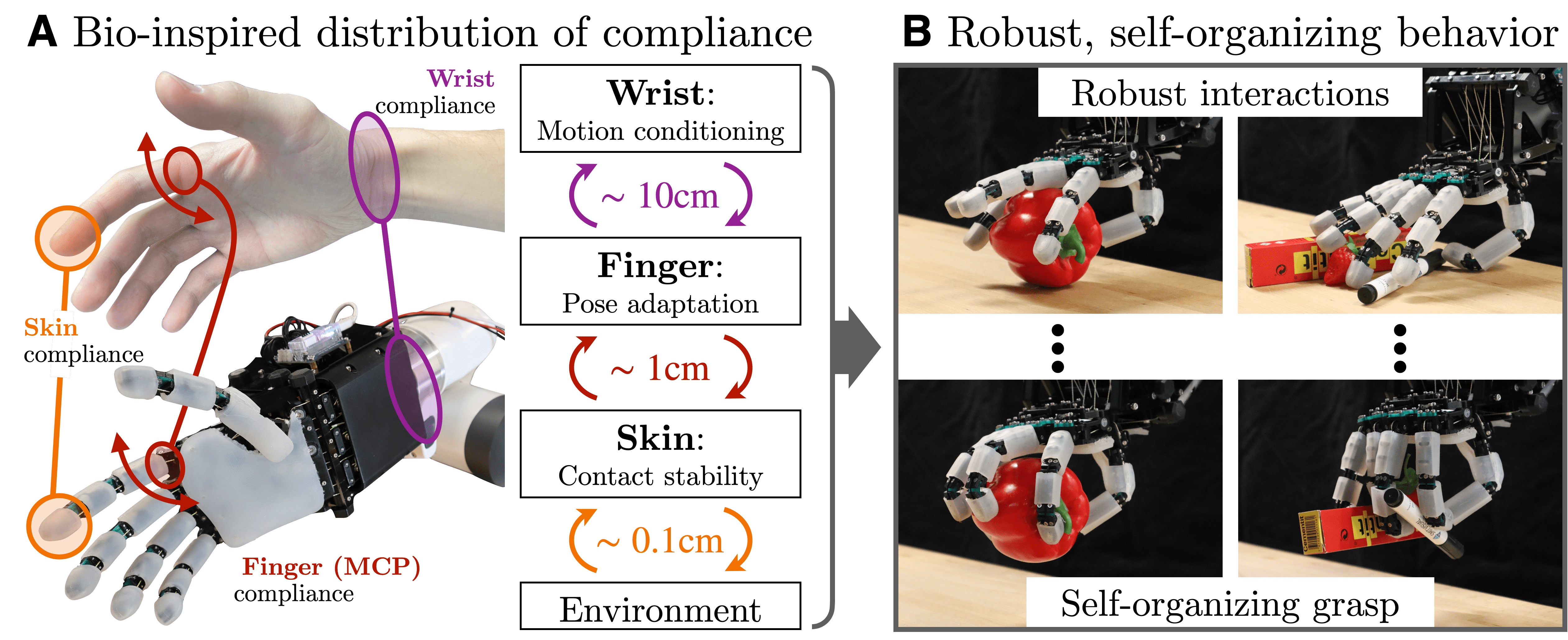
Robust Anthropomorphic Robotic Manipulation through Biomimetic Distributed Compliance
Kai Junge, Josie Hughes
The impressive capabilities of humans to robustly perform manipulation relies on compliant interactions, enabled through the structure and materials spatially distributed in our hands. We propose by mimicking this distributed compliance in an anthropomorphic robotic hand, the open-loop manipulation robustness increases and observe the emergence of human-like behaviours. To achieve this, we introduce the ADAPT Hand equipped with tunable compliance throughout the skin, fingers, and the wrist. Through extensive automated pick-and-place tests, we show the grasping robustness closely mirrors an estimated geometric theoretical limit, while `stress-testing' the robot hand to perform 800+ grasps. Finally, 24 items with largely varying geometries are grasped in a constrained environment with a success rate of 93%. We demonstrate the hand-object self-organization behavior underlines this extreme robustness, where the hand automatically exhibits different grasp types depending on object geometries. Furthermore, the robot grasp type mimics a natural human grasp with a direct similarity of 68%.
Read more4/16/2024

0
CoBT: Collaborative Programming of Behaviour Trees from One Demonstration for Robot Manipulation
Aayush Jain, Philip Long, Valeria Villani, John D. Kelleher, Maria Chiara Leva
Mass customization and shorter manufacturing cycles are becoming more important among small and medium-sized companies. However, classical industrial robots struggle to cope with product variation and dynamic environments. In this paper, we present CoBT, a collaborative programming by demonstration framework for generating reactive and modular behavior trees. CoBT relies on a single demonstration and a combination of data-driven machine learning methods with logic-based declarative learning to learn a task, thus eliminating the need for programming expertise or long development times. The proposed framework is experimentally validated on 7 manipulation tasks and we show that CoBT achieves approx. 93% success rate overall with an average of 7.5s programming time. We conduct a pilot study with non-expert users to provide feedback regarding the usability of CoBT.
Read more4/12/2024