Adv3D: Generating 3D Adversarial Examples for 3D Object Detection in Driving Scenarios with NeRF

0
🔎
Sign in to get full access
Overview
- Deep neural networks (DNNs) are susceptible to adversarial examples, which is a concern for autonomous driving systems using 3D object detection.
- Most previous adversarial attacks focused on 2D images, but these may not be realistic in the 3D world.
- This paper presents Adv3D, which explores modeling adversarial examples as Neural Radiance Fields (NeRFs) for a more realistic and realizable approach.
Plain English Explanation
Neural Radiance Fields (NeRFs) are a way to create photorealistic 3D scenes. Adv3D uses NeRFs to generate adversarial examples that can trick 3D object detectors used in autonomous driving systems.
Traditional adversarial attacks focus on changing 2D images in ways that fooling detectors, but these changes may not be realistic in the real 3D world. Adv3D takes a different approach by directly modeling the 3D environment as a NeRF. This allows generating adversarial examples that are more realistic and could potentially be realized in the physical world.
The key idea is to train the adversarial NeRF to minimize the confidence that a 3D object detector has in detecting surrounding objects. When this adversarial NeRF is rendered from different viewpoints, it causes a significant drop in the detector's performance.
To make the adversarial examples more physically realizable, Adv3D also proposes techniques like "primitive-aware sampling" and "semantic-guided regularization" to create 3D patch attacks with adversarial textures.
Overall, Adv3D demonstrates a new and more realistic approach to generating adversarial examples that could pose challenges for autonomous driving systems relying on 3D object detection.
Technical Explanation
The key technical innovations in Adv3D are:
-
Modeling Adversarial Examples as NeRFs: The paper proposes training an adversarial NeRF that, when rendered, causes a 3D object detector to perform poorly on the scene. This is achieved by minimizing the detector's confidence in the surrounding objects during training.
-
Primitive-Aware Sampling and Semantic-Guided Regularization: To make the adversarial NeRF more physically realizable, the authors introduce techniques to generate 3D patch attacks with adversarial textures. This includes sampling the NeRF in a way that respects the underlying geometric primitives and regularizing the NeRF to maintain semantic consistency.
-
Evaluation on Unseen Scenes: The paper evaluates the generalization of the trained adversarial NeRF by testing it on unseen validation scenes. The results show that the NeRF can cause significant performance drops for the 3D detector across different poses, scenes, and detector models.
-
Defense through Adversarial Training: As a potential defense, the authors explore adversarial training by augmenting the training data with the generated adversarial NeRFs. This approach is shown to improve the robustness of the 3D object detector against the proposed attacks.
Critical Analysis
The Adv3D paper presents a novel and promising approach to generating adversarial examples in the 3D domain. However, there are a few potential limitations and areas for further research:
-
Physical Realizability: While the paper proposes techniques to improve physical realizability, it's unclear how well the generated adversarial NeRFs and textures would translate to the real world. Further validation on physical setups may be necessary.
-
Broader Applicability: The paper focuses on 3D object detection in autonomous driving, but the techniques may have broader applicability to other 3D perception tasks, such as 3D reconstruction or SLAM. Exploring these directions could expand the impact of the research.
-
Computational Complexity: Training adversarial NeRFs may be computationally expensive, which could limit their practical deployment. Investigating more efficient approaches or approximations could help address this challenge.
-
Ethical Considerations: As with any adversarial AI research, there are potential ethical concerns around the misuse of these techniques. The paper could have discussed these issues and potential mitigation strategies in more depth.
Conclusion
The Adv3D paper presents a novel approach to generating adversarial examples in the 3D domain, which is particularly relevant for autonomous driving systems relying on 3D object detection. By modeling adversarial examples as NeRFs, the research demonstrates a more realistic and potentially realizable way to attack these safety-critical systems.
While the paper has some limitations and areas for further exploration, it represents an important step towards understanding the vulnerabilities of 3D perception in autonomous driving and paves the way for developing more robust and secure AI systems for self-driving cars.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔎
0
Adv3D: Generating 3D Adversarial Examples for 3D Object Detection in Driving Scenarios with NeRF
Leheng Li, Qing Lian, Ying-Cong Chen
Deep neural networks (DNNs) have been proven extremely susceptible to adversarial examples, which raises special safety-critical concerns for DNN-based autonomous driving stacks (i.e., 3D object detection). Although there are extensive works on image-level attacks, most are restricted to 2D pixel spaces, and such attacks are not always physically realistic in our 3D world. Here we present Adv3D, the first exploration of modeling adversarial examples as Neural Radiance Fields (NeRFs). Advances in NeRF provide photorealistic appearances and 3D accurate generation, yielding a more realistic and realizable adversarial example. We train our adversarial NeRF by minimizing the surrounding objects' confidence predicted by 3D detectors on the training set. Then we evaluate Adv3D on the unseen validation set and show that it can cause a large performance reduction when rendering NeRF in any sampled pose. To generate physically realizable adversarial examples, we propose primitive-aware sampling and semantic-guided regularization that enable 3D patch attacks with camouflage adversarial texture. Experimental results demonstrate that the trained adversarial NeRF generalizes well to different poses, scenes, and 3D detectors. Finally, we provide a defense method to our attacks that involves adversarial training through data augmentation. Project page: https://len-li.github.io/adv3d-web
Read more8/7/2024
🧪
0
HyperNeRFGAN: Hypernetwork approach to 3D NeRF GAN
Adam Kania, Artur Kasymov, Jakub Ko'sciukiewicz, Artur G'orak, Marcin Mazur, Maciej Zik{e}ba, Przemys{l}aw Spurek
The recent surge in popularity of deep generative models for 3D objects has highlighted the need for more efficient training methods, particularly given the difficulties associated with training with conventional 3D representations, such as voxels or point clouds. Neural Radiance Fields (NeRFs), which provide the current benchmark in terms of quality for the generation of novel views of complex 3D scenes from a limited set of 2D images, represent a promising solution to this challenge. However, the training of these models requires the knowledge of the respective camera positions from which the images were viewed. In this paper, we overcome this limitation by introducing HyperNeRFGAN, a Generative Adversarial Network (GAN) architecture employing a hypernetwork paradigm to transform a Gaussian noise into the weights of a NeRF architecture that does not utilize viewing directions in its training phase. Consequently, as evidenced by the findings of our experimental study, the proposed model, despite its notable simplicity in comparison to existing state-of-the-art alternatives, demonstrates superior performance on a diverse range of image datasets where camera position estimation is challenging, particularly in the context of medical data.
Read more8/23/2024
0
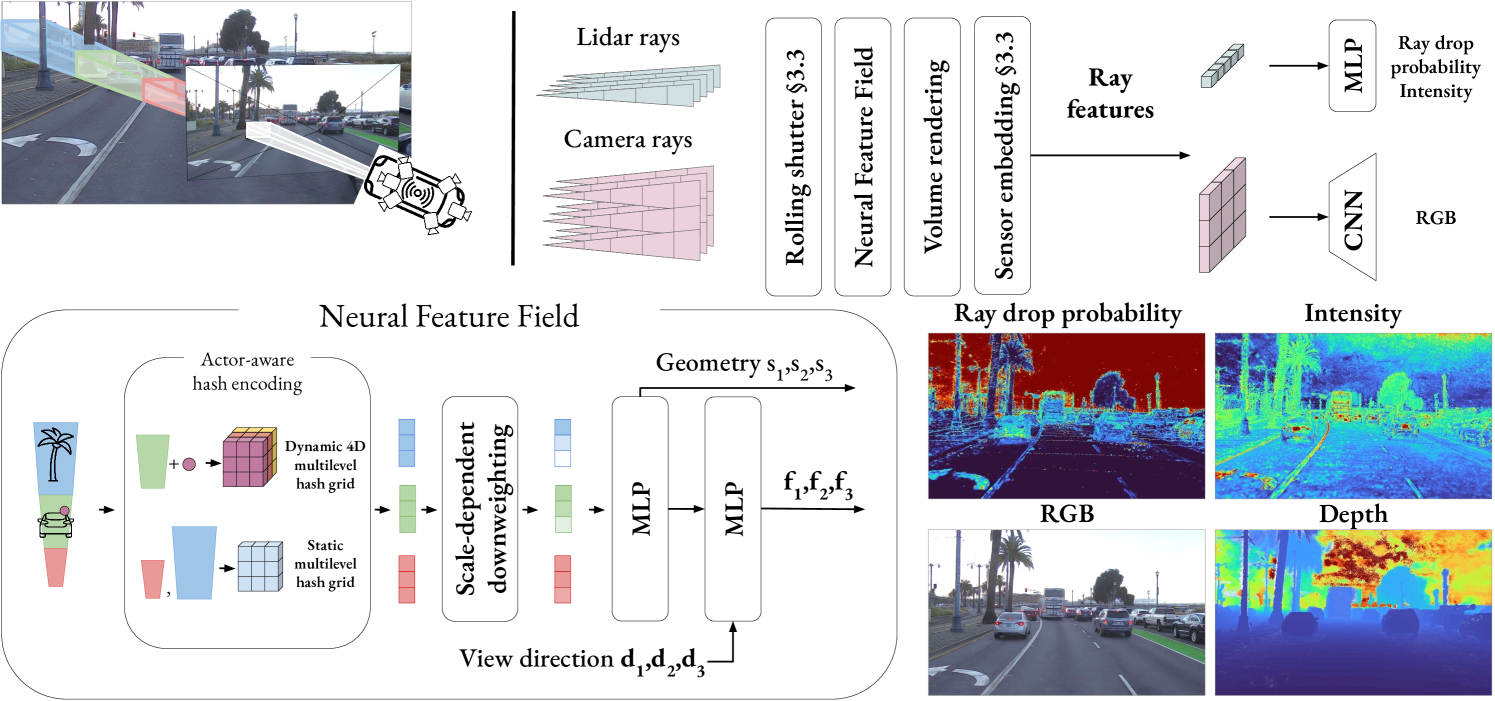
NeuRAD: Neural Rendering for Autonomous Driving
Adam Tonderski, Carl Lindstrom, Georg Hess, William Ljungbergh, Lennart Svensson, Christoffer Petersson
Neural radiance fields (NeRFs) have gained popularity in the autonomous driving (AD) community. Recent methods show NeRFs' potential for closed-loop simulation, enabling testing of AD systems, and as an advanced training data augmentation technique. However, existing methods often require long training times, dense semantic supervision, or lack generalizability. This, in turn, hinders the application of NeRFs for AD at scale. In this paper, we propose NeuRAD, a robust novel view synthesis method tailored to dynamic AD data. Our method features simple network design, extensive sensor modeling for both camera and lidar -- including rolling shutter, beam divergence and ray dropping -- and is applicable to multiple datasets out of the box. We verify its performance on five popular AD datasets, achieving state-of-the-art performance across the board. To encourage further development, we will openly release the NeuRAD source code. See https://github.com/georghess/NeuRAD .
Read more4/19/2024
🧠
0
Points2NeRF: Generating Neural Radiance Fields from 3D point cloud
Dominik Zimny, Joanna Waczy'nska, Tomasz Trzci'nski, Przemys{l}aw Spurek
Contemporary registration devices for 3D visual information, such as LIDARs and various depth cameras, capture data as 3D point clouds. In turn, such clouds are challenging to be processed due to their size and complexity. Existing methods address this problem by fitting a mesh to the point cloud and rendering it instead. This approach, however, leads to the reduced fidelity of the resulting visualization and misses color information of the objects crucial in computer graphics applications. In this work, we propose to mitigate this challenge by representing 3D objects as Neural Radiance Fields (NeRFs). We leverage a hypernetwork paradigm and train the model to take a 3D point cloud with the associated color values and return a NeRF network's weights that reconstruct 3D objects from input 2D images. Our method provides efficient 3D object representation and offers several advantages over the existing approaches, including the ability to condition NeRFs and improved generalization beyond objects seen in training. The latter we also confirmed in the results of our empirical evaluation.
Read more6/13/2024