AV4EV: Open-Source Modular Autonomous Electric Vehicle Platform for Making Mobility Research Accessible
2312.00951
0
0
👀
Abstract
When academic researchers develop and validate autonomous driving algorithms, there is a challenge in balancing high-performance capabilities with the cost and complexity of the vehicle platform. Much of today's research on autonomous vehicles (AV) is limited to experimentation on expensive commercial vehicles that require large skilled teams to retrofit the vehicles and test them in dedicated facilities. On the other hand, 1/10th-1/16th scaled-down vehicle platforms are more affordable but have limited similitude in performance and drivability. To address this issue, we present the design of a one-third-scale autonomous electric go-kart platform with open-source mechatronics design along with fully functional autonomous driving software. The platform's multi-modal driving system is capable of manual, autonomous, and teleoperation driving modes. It also features a flexible sensing suite for the algorithm deployment across perception, localization, planning, and control. This development serves as a bridge between full-scale vehicles and reduced-scale cars while accelerating cost-effective algorithmic advancements. Our experimental results demonstrate the AV4EV platform's capabilities and ease of use for developing new AV algorithms. All materials are available at AV4EV.org to stimulate collaborative efforts within the AV and electric vehicle (EV) communities.
Create account to get full access
Overview
- Researchers face a challenge in developing autonomous driving (AD) algorithms that balance high-performance capabilities with the cost and complexity of the vehicle platform.
- Most AD research is limited to expensive commercial vehicles that require large teams to retrofit and test, while scaled-down 1/10th-1/16th models have limited performance and drivability.
- To address this issue, the researchers present the design of a one-third-scale autonomous electric go-kart platform with open-source mechatronics and fully functional autonomous driving software.
Plain English Explanation
Developing self-driving car technology is a complex task, and researchers often face a tradeoff between creating high-performance algorithms and the practical constraints of the vehicle platform. Much of the current research on autonomous vehicles (AVs) is done using expensive commercial cars that require a lot of specialized work to outfit with the necessary sensors and software. On the other hand, smaller scale 1/10th or 1/16th size model cars are more affordable but don't perform or drive the same as full-size vehicles.
To try to bridge this gap, the researchers in this paper have designed a one-third scale autonomous electric go-kart platform. This platform has open-source mechatronics - the combination of mechanical, electrical, and software engineering - as well as fully functional autonomous driving capabilities. The go-kart can be operated manually, in autonomous mode, or by remote control. It has a flexible suite of sensors that can be used to test different perception, localization, planning, and control algorithms.
This platform is intended to provide a middle ground between expensive full-scale AV research and the limitations of small model cars. It allows for more cost-effective development and testing of new autonomous driving algorithms compared to using a full-size vehicle. The researchers hope this will help accelerate progress in the field of autonomous vehicles and electric vehicles (EVs).
Technical Explanation
The researchers have designed a one-third scale autonomous electric go-kart platform called AV4EV to address the challenges of balancing performance and cost in autonomous driving research. The platform features a multi-modal driving system capable of manual, autonomous, and teleoperation modes. It has a flexible sensing suite that can be used to deploy perception, localization, planning, and control algorithms across the autonomous driving stack.
The AV4EV platform is built with open-source mechatronics design, allowing for customization and easier integration of new components. This is in contrast to the specialized retrofitting required for full-scale commercial vehicles used in much of today's AV research.
The researchers conducted experiments to demonstrate the capabilities and ease of use of the AV4EV platform for developing new autonomous driving algorithms. The results show the platform can effectively bridge the gap between full-scale vehicles and reduced-scale models, providing a more cost-effective testbed for algorithm development and human-machine interaction research.
Critical Analysis
The researchers acknowledge that the one-third scale AV4EV platform does not fully replicate the performance and drivability of a full-size autonomous vehicle. There may be limitations in how well the algorithms and systems tested on the go-kart platform translate to real-world full-scale deployment.
Additionally, the paper does not provide detailed information on the specific sensing, computing, and actuation capabilities of the AV4EV platform. More technical specifications would be helpful for researchers to assess the platform's suitability for their particular needs.
That said, the open-source and customizable nature of the AV4EV platform is a strength, as it allows other researchers to adapt and build upon the design to suit their own requirements. The researchers encourage collaboration within the AV and EV communities to further develop and utilize this type of middle-ground testbed for autonomous driving research.
Conclusion
The AV4EV one-third scale autonomous electric go-kart platform presented in this paper aims to provide a bridge between expensive full-scale autonomous vehicle research and the limitations of small-scale models. By offering a more affordable and flexible testbed, the researchers hope to accelerate the development and validation of new autonomous driving algorithms. While the platform may not fully replicate real-world performance, it represents a useful middle ground that can stimulate collaborative efforts within the AV and EV communities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
RoboCar: A Rapidly Deployable Open-Source Platform for Autonomous Driving Research
Mehdi Testouri, Gamal Elghazaly, Raphael Frank
0
0
This paper introduces RoboCar, an open-source research platform for autonomous driving developed at the University of Luxembourg. RoboCar provides a modular, cost-effective framework for the development of experimental Autonomous Driving Systems (ADS), utilizing the 2018 KIA Soul EV. The platform integrates a robust hardware and software architecture that aligns with the vehicle's existing systems, minimizing the need for extensive modifications. It supports various autonomous driving functions and has undergone real-world testing on public roads in Luxembourg City. This paper outlines the platform's architecture, integration challenges, and initial test results, offering insights into its application in advancing autonomous driving research. RoboCar is available to anyone at https://github.com/sntubix/robocar and is released under an open-source MIT license.
5/7/2024

Towards Autonomous Driving with Small-Scale Cars: A Survey of Recent Development
Dianzhao Li, Paul Auerbach, Ostap Okhrin
0
0
While engaging with the unfolding revolution in autonomous driving, a challenge presents itself, how can we effectively raise awareness within society about this transformative trend? While full-scale autonomous driving vehicles often come with a hefty price tag, the emergence of small-scale car platforms offers a compelling alternative. These platforms not only serve as valuable educational tools for the broader public and young generations but also function as robust research platforms, contributing significantly to the ongoing advancements in autonomous driving technology. This survey outlines various small-scale car platforms, categorizing them and detailing the research advancements accomplished through their usage. The conclusion provides proposals for promising future directions in the field.
4/10/2024
Towards Validation of Autonomous Vehicles Across Scales using an Integrated Digital Twin Framework
Tanmay Vilas Samak, Chinmay Vilas Samak, Venkat Narayan Krovi
0
0
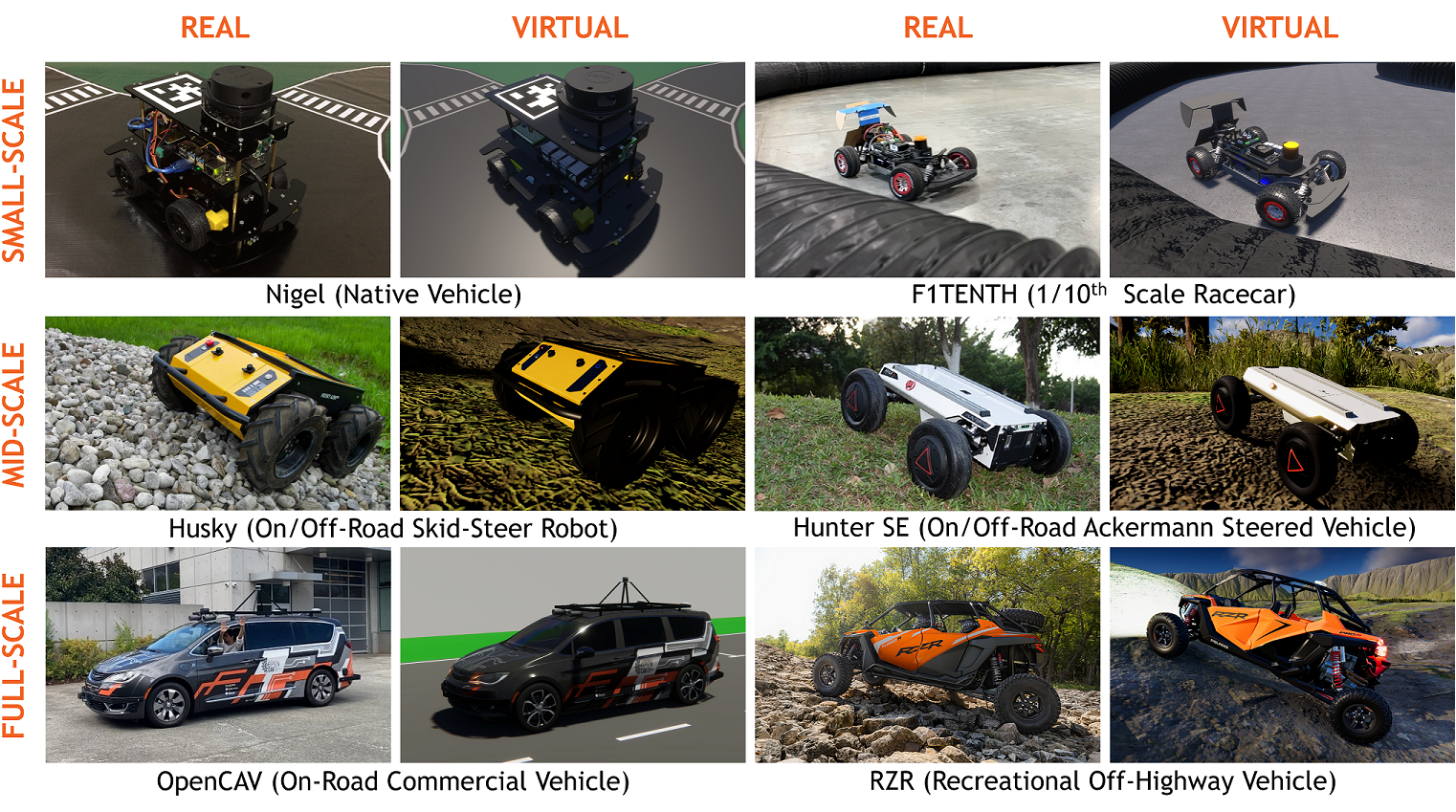
Autonomous vehicle platforms of varying spatial scales are employed within the research and development spectrum based on space, safety and monetary constraints. However, deploying and validating autonomy algorithms across varying operational scales presents challenges due to scale-specific dynamics, sensor integration complexities, computational constraints, regulatory considerations, environmental variability, interaction with other traffic participants and scalability concerns. In such a milieu, this work focuses on developing a unified framework for modeling and simulating digital twins of autonomous vehicle platforms across different scales and operational design domains (ODDs) to help support the streamlined development and validation of autonomy software stacks. Particularly, this work discusses the development of digital twin representations of 4 autonomous ground vehicles, which span across 3 different scales and target 3 distinct ODDs. We study the adoption of these autonomy-oriented digital twins to deploy a common autonomy software stack with an aim of end-to-end map-based navigation to achieve the ODD-specific objective(s) for each vehicle. Finally, we also discuss the flexibility of the proposed framework to support virtual, hybrid as well as physical testing with seamless sim2real transfer.
5/8/2024
↗️
Comprehensive Autonomous Vehicle Optimal Routing With Dynamic Heuristics
Ragav V, Jesher Joshua M, Syed Ibrahim S P
0
0
Auto manufacturers and research groups are working on autonomous driving for long period and achieved significant progress. Autonomous vehicles (AV) are expected to transform road traffic reduction from current conditions, avoiding accidents and congestion. As the implementation of an autonomous vehicle ecosystem includes complex automotive technology, ethics, passenger behaviour, traffic management policies and liability etc., the maturity of AV solutions are still evolving. The proposed model to improve AV user experience, uses a hybrid AV Network of multiple connected autonomous vehicles which communicate with each other in an environment shared by human driven vehicles. The proposed Optimal AV Network (OAVN) solution provides better coordination and optimization of autonomous vehicles, improved Transportation efficiency, improved passenger comfort and safety, real-time dynamic adaption of traffic & road conditions along with improved in-cabin assistance with inputs from various sensors. The true optimal solution for this problem, is to devise an automated guidance system for vehicles in an AV network, to reach destinations in best possible routes along with passenger comfort and safety. A custom informed search model is proposed along with other heuristic goals for better user experience. The results are analysed and compared to evaluate the effectiveness of the solution and identify gaps and future enhancements.
5/28/2024