Benchmarking Neural Radiance Fields for Autonomous Robots: An Overview
2405.05526
0
0
🧠
Abstract
Neural Radiance Fields (NeRF) have emerged as a powerful paradigm for 3D scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. In this paper, we present a comprehensive survey and analysis of the state-of-the-art techniques for utilizing NeRF to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3D reconstruction, segmentation, pose estimation, simultaneous localization and mapping (SLAM), navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, providing insights into their strengths and limitations. Moreover, we explore promising avenues for future research and development in this domain. Notably, we discuss the integration of advanced techniques such as 3D Gaussian splatting (3DGS), large language models (LLM), and generative AIs, envisioning enhanced reconstruction efficiency, scene understanding, decision-making capabilities. This survey serves as a roadmap for researchers seeking to leverage NeRFs to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
Create account to get full access
Overview
- This paper provides a comprehensive survey and analysis of the state-of-the-art techniques for utilizing Neural Radiance Fields (NeRF) to enhance the capabilities of autonomous robots.
- The authors focus on the perception, localization and navigation, and decision-making modules of autonomous robots, exploring tasks such as 3D reconstruction, segmentation, pose estimation, simultaneous localization and mapping (SLAM), navigation and planning, and interaction.
- The paper benchmarks existing NeRF-based methods, providing insights into their strengths and limitations, and explores promising avenues for future research and development in this domain.
Plain English Explanation
Neural Radiance Fields (NeRF) are a powerful way to represent 3D scenes using sparse and unstructured sensor data. In the context of autonomous robotics, where understanding the environment is crucial, NeRF holds great promise for improving performance.
This paper looks at how NeRF can be used to enhance the capabilities of autonomous robots. It focuses on key areas like perception, localization, navigation, and decision-making. The authors explore how NeRF can be applied to tasks like 3D reconstruction, object segmentation, pose estimation, SLAM, navigation, and interaction.
The paper evaluates existing NeRF-based methods, highlighting their strengths and weaknesses. It also discusses exciting new directions, such as integrating techniques like 3D Gaussian splatting, large language models, and generative AI. These advancements could lead to even more efficient reconstruction, better scene understanding, and improved decision-making for autonomous robots.
Overall, this paper provides a roadmap for researchers looking to leverage NeRF to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
Technical Explanation
The paper begins by introducing Neural Radiance Fields (NeRF) as a powerful paradigm for 3D scene representation. NeRF offers high-fidelity renderings and reconstructions from sparse and unstructured sensor data, making it highly relevant for autonomous robotics.
The authors then dive into the specific applications of NeRF in the context of autonomous robots. They explore how NeRF can be integrated into the perception, localization and navigation, and decision-making modules of autonomous systems. The paper covers tasks such as 3D reconstruction, segmentation, pose estimation, SLAM, navigation, planning, and interaction.
The paper provides a comprehensive review and analysis of the state-of-the-art NeRF-based methods, benchmarking their performance and highlighting their strengths and limitations. This includes techniques like 3D Gaussian splatting (3DGS), large language models (LLM), and generative AI, which the authors suggest could enhance reconstruction efficiency, scene understanding, and decision-making capabilities.
Critical Analysis
The paper thoroughly explores the potential of NeRF to enhance autonomous robotics, but it also acknowledges the existing limitations and challenges. For instance, the authors mention that while NeRF offers high-fidelity reconstructions, it may struggle with dynamic scenes or rapid changes in the environment.
Additionally, the integration of NeRF with other advanced techniques, such as 3DGS, LLM, and generative AI, is still in the early stages. The paper highlights the need for further research to fully realize the potential of these integrations and address any potential issues or trade-offs.
The authors also note that the computational and memory requirements of NeRF-based methods may pose challenges for real-time applications on resource-constrained robotic platforms. Optimizing the efficiency of NeRF-based algorithms would be a crucial area for future development.
Overall, the paper provides a balanced and insightful analysis of the current state of NeRF in autonomous robotics, while also identifying promising directions for future research and innovation.
Conclusion
This comprehensive survey paper explores the potential of Neural Radiance Fields (NeRF) to enhance the capabilities of autonomous robots. The authors delve into the application of NeRF in perception, localization, navigation, and decision-making modules, showcasing its versatility in tasks like 3D reconstruction, segmentation, pose estimation, SLAM, navigation, and interaction.
By benchmarking existing NeRF-based methods and identifying their strengths and limitations, the paper provides valuable insights for researchers and developers working in the field of autonomous robotics. Moreover, the authors highlight exciting avenues for future research, such as integrating advanced techniques like 3D Gaussian splatting, large language models, and generative AI, which could lead to even more efficient reconstruction, improved scene understanding, and enhanced decision-making capabilities.
This survey serves as a roadmap for leveraging NeRF to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments. As the research in this domain continues to evolve, the insights and recommendations provided in this paper will be invaluable for driving progress and pushing the boundaries of what is possible in autonomous robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Neural Radiance Field in Autonomous Driving: A Survey
Lei He, Leheng Li, Wenchao Sun, Zeyu Han, Yichen Liu, Sifa Zheng, Jianqiang Wang, Keqiang Li
0
0
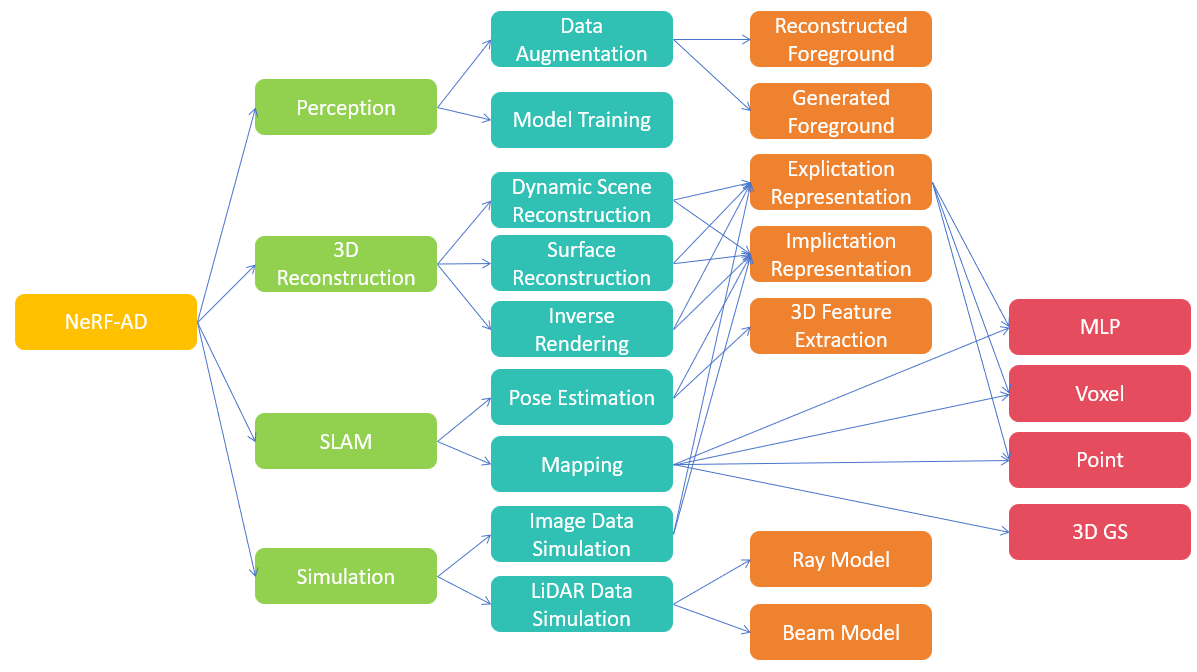
Neural Radiance Field (NeRF) has garnered significant attention from both academia and industry due to its intrinsic advantages, particularly its implicit representation and novel view synthesis capabilities. With the rapid advancements in deep learning, a multitude of methods have emerged to explore the potential applications of NeRF in the domain of Autonomous Driving (AD). However, a conspicuous void is apparent within the current literature. To bridge this gap, this paper conducts a comprehensive survey of NeRF's applications in the context of AD. Our survey is structured to categorize NeRF's applications in Autonomous Driving (AD), specifically encompassing perception, 3D reconstruction, simultaneous localization and mapping (SLAM), and simulation. We delve into in-depth analysis and summarize the findings for each application category, and conclude by providing insights and discussions on future directions in this field. We hope this paper serves as a comprehensive reference for researchers in this domain. To the best of our knowledge, this is the first survey specifically focused on the applications of NeRF in the Autonomous Driving domain.
4/29/2024

NeRF in Robotics: A Survey
Guangming Wang, Lei Pan, Songyou Peng, Shaohui Liu, Chenfeng Xu, Yanzi Miao, Wei Zhan, Masayoshi Tomizuka, Marc Pollefeys, Hesheng Wang
0
0
Meticulous 3D environment representations have been a longstanding goal in computer vision and robotics fields. The recent emergence of neural implicit representations has introduced radical innovation to this field as implicit representations enable numerous capabilities. Among these, the Neural Radiance Field (NeRF) has sparked a trend because of the huge representational advantages, such as simplified mathematical models, compact environment storage, and continuous scene representations. Apart from computer vision, NeRF has also shown tremendous potential in the field of robotics. Thus, we create this survey to provide a comprehensive understanding of NeRF in the field of robotics. By exploring the advantages and limitations of NeRF, as well as its current applications and future potential, we hope to shed light on this promising area of research. Our survey is divided into two main sections: textit{The Application of NeRF in Robotics} and textit{The Advance of NeRF in Robotics}, from the perspective of how NeRF enters the field of robotics. In the first section, we introduce and analyze some works that have been or could be used in the field of robotics from the perception and interaction perspectives. In the second section, we show some works related to improving NeRF's own properties, which are essential for deploying NeRF in the field of robotics. In the discussion section of the review, we summarize the existing challenges and provide some valuable future research directions for reference.
5/3/2024

DiL-NeRF: Delving into Lidar for Neural Radiance Field on Street Scenes
Shanlin Sun, Bingbing Zhuang, Ziyu Jiang, Buyu Liu, Xiaohui Xie, Manmohan Chandraker
0
0
Photorealistic simulation plays a crucial role in applications such as autonomous driving, where advances in neural radiance fields (NeRFs) may allow better scalability through the automatic creation of digital 3D assets. However, reconstruction quality suffers on street scenes due to largely collinear camera motions and sparser samplings at higher speeds. On the other hand, the application often demands rendering from camera views that deviate from the inputs to accurately simulate behaviors like lane changes. In this paper, we propose several insights that allow a better utilization of Lidar data to improve NeRF quality on street scenes. First, our framework learns a geometric scene representation from Lidar, which is fused with the implicit grid-based representation for radiance decoding, thereby supplying stronger geometric information offered by explicit point cloud. Second, we put forth a robust occlusion-aware depth supervision scheme, which allows utilizing densified Lidar points by accumulation. Third, we generate augmented training views from Lidar points for further improvement. Our insights translate to largely improved novel view synthesis under real driving scenes.
5/7/2024
🧠
Novel View Synthesis with Neural Radiance Fields for Industrial Robot Applications
Markus Hillemann, Robert Langendorfer, Max Heiken, Max Mehltretter, Andreas Schenk, Martin Weinmann, Stefan Hinz, Christian Heipke, Markus Ulrich
0
0
Neural Radiance Fields (NeRFs) have become a rapidly growing research field with the potential to revolutionize typical photogrammetric workflows, such as those used for 3D scene reconstruction. As input, NeRFs require multi-view images with corresponding camera poses as well as the interior orientation. In the typical NeRF workflow, the camera poses and the interior orientation are estimated in advance with Structure from Motion (SfM). But the quality of the resulting novel views, which depends on different parameters such as the number and distribution of available images, as well as the accuracy of the related camera poses and interior orientation, is difficult to predict. In addition, SfM is a time-consuming pre-processing step, and its quality strongly depends on the image content. Furthermore, the undefined scaling factor of SfM hinders subsequent steps in which metric information is required. In this paper, we evaluate the potential of NeRFs for industrial robot applications. We propose an alternative to SfM pre-processing: we capture the input images with a calibrated camera that is attached to the end effector of an industrial robot and determine accurate camera poses with metric scale based on the robot kinematics. We then investigate the quality of the novel views by comparing them to ground truth, and by computing an internal quality measure based on ensemble methods. For evaluation purposes, we acquire multiple datasets that pose challenges for reconstruction typical of industrial applications, like reflective objects, poor texture, and fine structures. We show that the robot-based pose determination reaches similar accuracy as SfM in non-demanding cases, while having clear advantages in more challenging scenarios. Finally, we present first results of applying the ensemble method to estimate the quality of the synthetic novel view in the absence of a ground truth.
5/8/2024