NeRF in Robotics: A Survey
2405.01333
0
0

Abstract
Meticulous 3D environment representations have been a longstanding goal in computer vision and robotics fields. The recent emergence of neural implicit representations has introduced radical innovation to this field as implicit representations enable numerous capabilities. Among these, the Neural Radiance Field (NeRF) has sparked a trend because of the huge representational advantages, such as simplified mathematical models, compact environment storage, and continuous scene representations. Apart from computer vision, NeRF has also shown tremendous potential in the field of robotics. Thus, we create this survey to provide a comprehensive understanding of NeRF in the field of robotics. By exploring the advantages and limitations of NeRF, as well as its current applications and future potential, we hope to shed light on this promising area of research. Our survey is divided into two main sections: textit{The Application of NeRF in Robotics} and textit{The Advance of NeRF in Robotics}, from the perspective of how NeRF enters the field of robotics. In the first section, we introduce and analyze some works that have been or could be used in the field of robotics from the perception and interaction perspectives. In the second section, we show some works related to improving NeRF's own properties, which are essential for deploying NeRF in the field of robotics. In the discussion section of the review, we summarize the existing challenges and provide some valuable future research directions for reference.
Create account to get full access
Overview
• This paper provides a comprehensive survey on the use of Neural Radiance Fields (NeRFs) in robotics applications. • NeRFs are a powerful 3D scene representation that can be used for novel view synthesis, robot navigation, and other robotics tasks. • The paper covers the key technical developments in NeRF-based methods for robotics, their applications, and some of the challenges and future research directions.
Plain English Explanation
NeRFs are a type of 3D model that can be used to represent the world around us. Unlike traditional 3D models which store information about the shapes and positions of objects, NeRFs store information about the color and brightness of the light coming from different parts of a scene. This allows them to generate highly realistic images of a 3D environment, even from new viewpoints that the model hasn't seen before.
Robotics researchers have been exploring ways to use NeRFs to help robots better understand and navigate their surroundings. For example, a robot could use a NeRF model to plan the best path through an environment, or to generate realistic visualizations that help a human operator understand what the robot is seeing. The paper summarizes the key advances in this area, explaining how NeRFs can be adapted and applied to different robotics problems.
Some of the main applications of NeRFs in robotics include [link to "Novel View Synthesis" section], [link to "Robot Navigation" section], and [link to "Other Applications" section]. The paper also discusses some of the technical challenges involved, such as [link to "Challenges and Future Work" section], and how researchers are working to address them.
Technical Explanation
The paper begins by providing an overview of the core NeRF technology and how it works. NeRFs are a type of neural network that can learn to model the 3D structure of a scene by analyzing a collection of 2D images of that scene taken from different viewpoints. The network is trained to predict the color and opacity of the light rays passing through each point in the 3D space, which allows it to generate photorealistic renderings of the scene from any desired viewpoint.
The authors then dive into how NeRFs can be adapted and applied to various robotics problems. One key area is [link to "Novel View Synthesis" section], where NeRFs can be used to synthesize new views of a scene based on a set of input images. This can be useful for robot navigation, telepresence, and other applications where a robot needs to understand its surroundings from different perspectives.
Another major application is [link to "Robot Navigation" section], where NeRFs can be used to build 3D maps of the environment that a robot can use for planning and localization. By representing the scene as a continuous 3D function rather than a discrete set of points or polygons, NeRFs can capture fine details and handle partially occluded or dynamic environments more effectively.
The paper also covers [link to "Other Applications" section] such as using NeRFs for object manipulation, augmented reality, and even connecting visual information with text-based descriptions of a scene.
Critical Analysis
The paper provides a comprehensive and well-structured overview of the current state of NeRF-based methods in robotics. The authors do a good job of highlighting the key technical developments and discussing how NeRFs can be adapted to address a variety of robotics problems.
That said, the paper does acknowledge some of the limitations and challenges involved in using NeRFs for robotics applications. For example, [link to "Challenges and Future Work" section] notes that NeRFs can be computationally expensive to train and render, which may limit their real-time use in some robotics scenarios. The paper also mentions the difficulty of incorporating dynamic elements and handling sensor noise and calibration issues.
Additionally, while the paper covers a wide range of NeRF-based methods and applications, it doesn't provide a deep dive into the details of any particular approach. Readers looking for a more technical understanding of specific NeRF-based algorithms or system architectures may need to refer to the cited papers for more information.
Overall, this paper serves as a valuable introduction and high-level survey of the use of NeRFs in robotics. It should give readers a good understanding of the potential benefits and current limitations of this technology, as well as some insight into promising directions for future research and development.
Conclusion
In summary, this paper highlights the growing interest and potential of using Neural Radiance Fields (NeRFs) in robotics applications. NeRFs offer a powerful 3D representation that can enable novel view synthesis, improved robot navigation, and a range of other capabilities.
The survey covers the key technical developments in NeRF-based methods for robotics, demonstrating how researchers are adapting this technology to address challenges in areas like [link to "Robot Navigation" section] and [link to "Other Applications" section]. While there are still some limitations and challenges to overcome, the paper suggests that NeRFs could play an increasingly important role in the future of robotics as the technology continues to evolve.
Overall, this paper provides a valuable overview of the current state of NeRF-based methods in robotics and the exciting possibilities they hold for advancing the field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
Benchmarking Neural Radiance Fields for Autonomous Robots: An Overview
Yuhang Ming, Xingrui Yang, Weihan Wang, Zheng Chen, Jinglun Feng, Yifan Xing, Guofeng Zhang
0
0
Neural Radiance Fields (NeRF) have emerged as a powerful paradigm for 3D scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. In this paper, we present a comprehensive survey and analysis of the state-of-the-art techniques for utilizing NeRF to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3D reconstruction, segmentation, pose estimation, simultaneous localization and mapping (SLAM), navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, providing insights into their strengths and limitations. Moreover, we explore promising avenues for future research and development in this domain. Notably, we discuss the integration of advanced techniques such as 3D Gaussian splatting (3DGS), large language models (LLM), and generative AIs, envisioning enhanced reconstruction efficiency, scene understanding, decision-making capabilities. This survey serves as a roadmap for researchers seeking to leverage NeRFs to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
5/10/2024
Neural Radiance Field in Autonomous Driving: A Survey
Lei He, Leheng Li, Wenchao Sun, Zeyu Han, Yichen Liu, Sifa Zheng, Jianqiang Wang, Keqiang Li
0
0
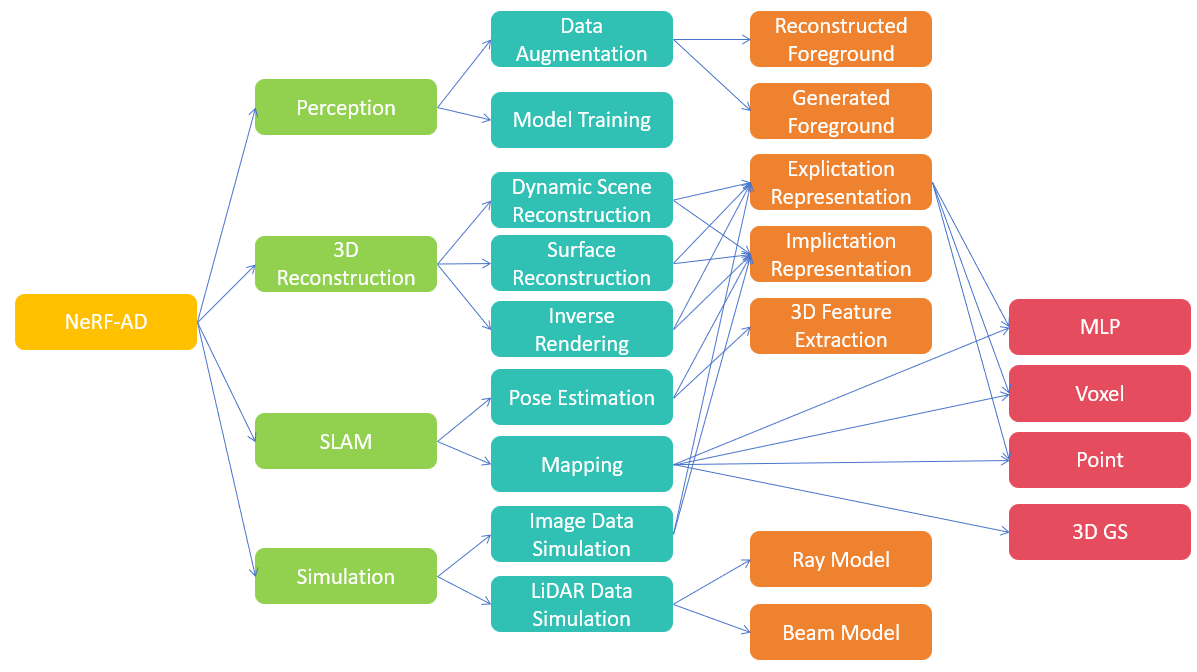
Neural Radiance Field (NeRF) has garnered significant attention from both academia and industry due to its intrinsic advantages, particularly its implicit representation and novel view synthesis capabilities. With the rapid advancements in deep learning, a multitude of methods have emerged to explore the potential applications of NeRF in the domain of Autonomous Driving (AD). However, a conspicuous void is apparent within the current literature. To bridge this gap, this paper conducts a comprehensive survey of NeRF's applications in the context of AD. Our survey is structured to categorize NeRF's applications in Autonomous Driving (AD), specifically encompassing perception, 3D reconstruction, simultaneous localization and mapping (SLAM), and simulation. We delve into in-depth analysis and summarize the findings for each application category, and conclude by providing insights and discussions on future directions in this field. We hope this paper serves as a comprehensive reference for researchers in this domain. To the best of our knowledge, this is the first survey specifically focused on the applications of NeRF in the Autonomous Driving domain.
4/29/2024
🧠
Novel View Synthesis with Neural Radiance Fields for Industrial Robot Applications
Markus Hillemann, Robert Langendorfer, Max Heiken, Max Mehltretter, Andreas Schenk, Martin Weinmann, Stefan Hinz, Christian Heipke, Markus Ulrich
0
0
Neural Radiance Fields (NeRFs) have become a rapidly growing research field with the potential to revolutionize typical photogrammetric workflows, such as those used for 3D scene reconstruction. As input, NeRFs require multi-view images with corresponding camera poses as well as the interior orientation. In the typical NeRF workflow, the camera poses and the interior orientation are estimated in advance with Structure from Motion (SfM). But the quality of the resulting novel views, which depends on different parameters such as the number and distribution of available images, as well as the accuracy of the related camera poses and interior orientation, is difficult to predict. In addition, SfM is a time-consuming pre-processing step, and its quality strongly depends on the image content. Furthermore, the undefined scaling factor of SfM hinders subsequent steps in which metric information is required. In this paper, we evaluate the potential of NeRFs for industrial robot applications. We propose an alternative to SfM pre-processing: we capture the input images with a calibrated camera that is attached to the end effector of an industrial robot and determine accurate camera poses with metric scale based on the robot kinematics. We then investigate the quality of the novel views by comparing them to ground truth, and by computing an internal quality measure based on ensemble methods. For evaluation purposes, we acquire multiple datasets that pose challenges for reconstruction typical of industrial applications, like reflective objects, poor texture, and fine structures. We show that the robot-based pose determination reaches similar accuracy as SfM in non-demanding cases, while having clear advantages in more challenging scenarios. Finally, we present first results of applying the ensemble method to estimate the quality of the synthetic novel view in the absence of a ground truth.
5/8/2024

Methods and strategies for improving the novel view synthesis quality of neural radiation field
Shun Fang, Ming Cui, Xing Feng, Yanna Lv
0
0
Neural Radiation Field (NeRF) technology can learn a 3D implicit model of a scene from 2D images and synthesize realistic novel view images. This technology has received widespread attention from the industry and has good application prospects. In response to the problem that the rendering quality of NeRF images needs to be improved, many researchers have proposed various methods to improve the rendering quality in the past three years. The latest relevant papers are classified and reviewed, the technical principles behind quality improvement are analyzed, and the future evolution direction of quality improvement methods is discussed. This study can help researchers quickly understand the current state and evolutionary context of technology in this field, which is helpful in inspiring the development of more efficient algorithms and promoting the application of NeRF technology in related fields.
4/19/2024