Capture Point Control in Thruster-Assisted Bipedal Locomotion
2406.14799
0
0

Abstract
Despite major advancements in control design that are robust to unplanned disturbances, bipedal robots are still susceptible to falling over and struggle to negotiate rough terrains. By utilizing thrusters in our bipedal robot, we can perform additional posture manipulation and expand the modes of locomotion to enhance the robot's stability and ability to negotiate rough and difficult-to-navigate terrains. In this paper, we present our efforts in designing a controller based on capture point control for our thruster-assisted walking model named Harpy and explore its control design possibilities. While capture point control based on centroidal models for bipedal systems has been extensively studied, the incorporation of external forces that can influence the dynamics of linear inverted pendulum models, often used in capture point-based works, has not been explored before. The inclusion of these external forces can lead to interesting interpretations of locomotion, such as virtual buoyancy studied in aquatic-legged locomotion. This paper outlines the dynamical model of our robot, the capture point method we use to assist the upper body stabilization, and the simulation work done to show the controller's feasibility.
Create account to get full access
Overview
- This paper presents a capture point control framework for thruster-assisted bipedal robots to enable robust and agile locomotion.
- The approach combines a reduced-order model of the robot dynamics with a model predictive control formulation to generate stable and versatile walking behaviors.
- The proposed system is evaluated through simulations and tested on a physical bipedal robot platform, demonstrating its ability to navigate narrow paths and harness natural oscillations for efficient high-speed locomotion.
Plain English Explanation
The research paper describes a new control system for bipedal robots - robots that walk on two legs like humans. These robots often use powerful thrusters or motors to help them move and maintain balance.
The key idea is to use a simplified mathematical model of the robot's dynamics, combined with a powerful control algorithm, to enable the robot to walk in a very stable and agile way. The simplified model helps the control system make quick decisions to keep the robot balanced and moving smoothly, even when navigating tight spaces or moving at high speeds.
By harnessing the natural oscillations and momentum of the robot's body, the system can also achieve very efficient high-speed locomotion. This means the robot can move quickly while using less energy.
The researchers tested their approach both in computer simulations and on a physical bipedal robot platform. The results show the system can make the robot gracefully navigate narrow paths and maintain balance and control even in challenging situations.
Technical Explanation
The paper presents a model predictive capture point control framework for thruster-assisted bipedal robots. This approach combines a Harpy Reduced-Order Model (HROM) of the robot dynamics with a model predictive control (MPC) formulation to enable robust and agile locomotion.
The HROM captures the essential dynamics of the bipedal robot using a low-dimensional state representation. This simplified model is then used within the MPC framework to plan optimal control actions that maintain balance and tracking of a desired motion trajectory.
A key aspect of the approach is its ability to harness the natural oscillations of the robot's dynamics for efficient high-speed locomotion. The system can also handle contingencies such as unexpected disturbances or changes in the environment.
The proposed control framework is evaluated through simulations and experiments on a physical bipedal robot platform. The results demonstrate the system's effectiveness in navigating narrow paths and achieving agile, versatile, and energy-efficient locomotion behaviors.
Critical Analysis
The paper presents a compelling control framework that allows bipedal robots to navigate complex environments and move efficiently at high speeds. The use of the simplified HROM model and the MPC formulation appears to be a well-designed and effective approach.
One potential limitation, however, is the reliance on accurate knowledge of the robot's dynamics and the environment. In real-world situations, there may be uncertainties or unmodeled effects that could challenge the system's performance. The paper does mention the ability to handle contingencies, but further exploration of the system's robustness to various perturbations would be valuable.
Additionally, the experimental evaluation was conducted on a single physical robot platform. While the simulation results are promising, it would be helpful to see the system tested on a wider range of robot designs and environments to better understand its generalizability.
Overall, the research presented in this paper represents a significant advancement in the field of bipedal robot control, with the potential to enable more robust, agile, and efficient locomotion capabilities. Further development and validation of the approach could lead to exciting applications in areas such as disaster response, search and rescue, and legged robotics.
Conclusion
This paper introduces a novel capture point control framework for thruster-assisted bipedal robots that leverages a reduced-order model and model predictive control to achieve robust, agile, and energy-efficient locomotion. The system's ability to harness natural oscillations and handle contingencies makes it a promising approach for enabling bipedal robots to navigate complex environments with grace and versatility.
The simulation and experimental results demonstrate the effectiveness of the proposed control system, and the critical analysis highlights areas for further exploration and validation. As the field of legged robotics continues to advance, this research represents an important step forward in developing control strategies that can unlock the full potential of bipedal platforms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
A Model Predictive Capture Point Control Framework for Robust Humanoid Balancing via Ankle, Hip, and Stepping Strategies
Myeong-Ju Kim, Daegyu Lim, Gyeongjae Park, Jaeheung Park
0
0
The robust balancing capability of humanoid robots has been considered one of the crucial requirements for their mobility in real environments. In particular, many studies have been devoted to the efficient implementation of human-inspired ankle, hip, and stepping strategies, to endow humanoids with human-level balancing capability. In this paper, a robust balance control framework for humanoids is proposed. Firstly, a Model Predictive Control (MPC) framework is proposed for Capture Point (CP) tracking control, enabling the integration of ankle, hip, and stepping strategies within a single framework. Additionally, a variable weighting method is introduced that adjusts the weighting parameters of the Centroidal Angular Momentum (CAM) damping control. Secondly, a hierarchical structure of the MPC and a stepping controller was proposed, allowing for the step time optimization. The robust balancing performance of the proposed method is validated through simulations and real robot experiments. Furthermore, a superior balancing performance is demonstrated compared to a state-of-the-art Quadratic Programming (QP)-based CP controller that employs the ankle, hip, and stepping strategies. The supplementary video is available at https://youtu.be/7Y4CykTpgrw
5/14/2024
🏅
Agile and versatile bipedal robot tracking control through reinforcement learning
Jiayi Li, Linqi Ye, Yi Cheng, Houde Liu, Bin Liang
0
0
The remarkable athletic intelligence displayed by humans in complex dynamic movements such as dancing and gymnastics suggests that the balance mechanism in biological beings is decoupled from specific movement patterns. This decoupling allows for the execution of both learned and unlearned movements under certain constraints while maintaining balance through minor whole-body coordination. To replicate this balance ability and body agility, this paper proposes a versatile controller for bipedal robots. This controller achieves ankle and body trajectory tracking across a wide range of gaits using a single small-scale neural network, which is based on a model-based IK solver and reinforcement learning. We consider a single step as the smallest control unit and design a universally applicable control input form suitable for any single-step variation. Highly flexible gait control can be achieved by combining these minimal control units with high-level policy through our extensible control interface. To enhance the trajectory-tracking capability of our controller, we utilize a three-stage training curriculum. After training, the robot can move freely between target footholds at varying distances and heights. The robot can also maintain static balance without repeated stepping to adjust posture. Finally, we evaluate the tracking accuracy of our controller on various bipedal tasks, and the effectiveness of our control framework is verified in the simulation environment.
4/15/2024
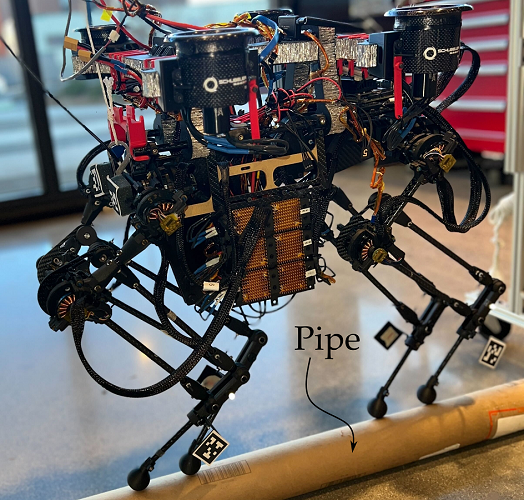
Narrow-Path, Dynamic Walking Using Integrated Posture Manipulation and Thrust Vectoring
Kaushik Venkatesh Krishnamurthy, Chenghao Wang, Shreyansh Pitroda, Adarsh Salagame, Eric Sihite, Reza Nemovi, Alireza Ramezani, Morteza Gharib
0
0
This research concentrates on enhancing the navigational capabilities of Northeastern Universitys Husky, a multi-modal quadrupedal robot, that can integrate posture manipulation and thrust vectoring, to traverse through narrow pathways such as walking over pipes and slacklining. The Husky is outfitted with thrusters designed to stabilize its body during dynamic walking over these narrow paths. The project involves modeling the robot using the HROM (Husky Reduced Order Model) and developing an optimal control framework. This framework is based on polynomial approximation of the HROM and a collocation approach to derive optimal thruster commands necessary for achieving dynamic walking on narrow paths. The effectiveness of the modeling and control design approach is validated through simulations conducted using Matlab.
5/13/2024

Harnessing Natural Oscillations for High-Speed, Efficient Asymmetrical Locomotion in Quadrupedal Robots
Jing Cheng, Yasser G. Alqaham, Zhenyu Gan
0
0
This study explores the dynamics of asymmetrical bounding gaits in quadrupedal robots, focusing on the integration of torso pitching and hip motion to enhance speed and stability. Traditional control strategies often enforce a fixed posture, minimizing natural body movements to simplify the control problem. However, this approach may overlook the inherent dynamical advantages found in natural locomotion. By considering the robot as two interconnected segments, we concentrate on stance leg motion while allowing passive torso oscillation, drawing inspiration from natural dynamics and underactuated robotics principles. Our control scheme employs Linear Inverted Pendulum (LIP) and Spring-Loaded Inverted Pendulum (SLIP) models to govern front and rear leg movements independently. This approach has been validated through extensive simulations and hardware experiments, demonstrating successful high-speed locomotion with top speeds nearing 4 m/s and reduced ground reaction forces, indicating a more efficient gait. Furthermore, unlike conventional methods, our strategy leverages natural torso oscillations to aid leg circulation and stride length, aligning robot dynamics more closely with biological counterparts. Our findings suggest that embracing the natural dynamics of quadrupedal movement, particularly in asymmetrical gaits like bounding, can lead to more stable, efficient, and high-speed robotic locomotion. This investigation lays the groundwork for future studies on versatile and dynamic quadrupedal gaits and their potential applications in scenarios demanding rapid and effective locomotion.
5/29/2024