Narrow-Path, Dynamic Walking Using Integrated Posture Manipulation and Thrust Vectoring
2405.06070
0
0
Abstract
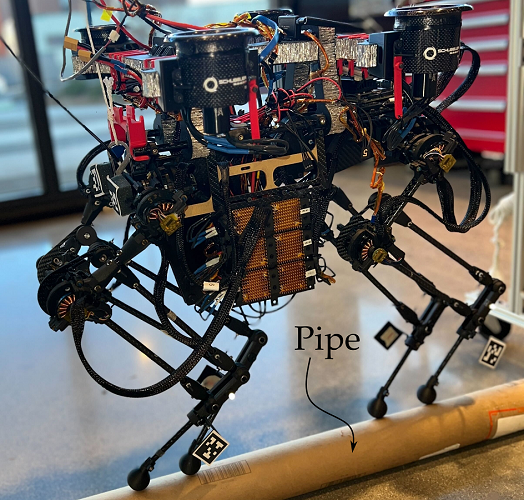
This research concentrates on enhancing the navigational capabilities of Northeastern Universitys Husky, a multi-modal quadrupedal robot, that can integrate posture manipulation and thrust vectoring, to traverse through narrow pathways such as walking over pipes and slacklining. The Husky is outfitted with thrusters designed to stabilize its body during dynamic walking over these narrow paths. The project involves modeling the robot using the HROM (Husky Reduced Order Model) and developing an optimal control framework. This framework is based on polynomial approximation of the HROM and a collocation approach to derive optimal thruster commands necessary for achieving dynamic walking on narrow paths. The effectiveness of the modeling and control design approach is validated through simulations conducted using Matlab.
Create account to get full access
Overview
- This paper presents a novel approach to narrow-path, dynamic walking using a combination of posture manipulation and thrust vectoring.
- The research focuses on the Husky Carbon, a quadruped robot, and explores techniques to enable it to navigate challenging, constrained environments.
- The proposed method integrates control of the robot's posture and thrust vectoring to improve its ability to traverse narrow paths while maintaining dynamic stability.
Plain English Explanation
The researchers have developed a new way for a four-legged robot called the Husky Carbon to walk through narrow spaces in a dynamic and stable manner. Traditional robots can struggle to navigate tight paths, but this approach combines two key techniques to help the robot overcome these challenges.
First, the researchers manipulate the robot's posture - the way it positions its body and limbs. This allows the robot to adjust its shape and balance as it moves, helping it squeeze through tight spaces. Second, the researchers use "thrust vectoring" - precisely controlling the direction and force of the robot's thrusts or pushes. This further enhances the robot's ability to maintain stability and control as it navigates narrow paths.
By integrating these posture manipulation and thrust vectoring techniques, the researchers have enabled the Husky Carbon robot to dynamically walk through constrained environments while keeping its balance. This could have important applications for robots operating in tight spaces, such as search and rescue missions or exploring cluttered industrial settings.
Technical Explanation
The paper presents a novel framework for narrow-path, dynamic walking using integrated posture manipulation and thrust vectoring. The researchers focus on the Husky Carbon, a quadruped robot, and develop techniques to enable it to navigate challenging, constrained environments.
The key elements of the proposed approach are:
-
Posture Manipulation: The researchers control the robot's posture - the positioning of its body and limbs - to help it adapt its shape and balance as it moves through narrow spaces. This posture manipulation is integrated with the robot's locomotion control.
-
Thrust Vectoring: In addition to posture control, the researchers use thrust vectoring - precisely controlling the direction and force of the robot's thrusts or pushes. This further enhances the robot's stability and maneuverability in tight spaces.
-
Integrated Control: The posture manipulation and thrust vectoring techniques are combined into a unified control framework. This allows the robot to dynamically adjust its shape and forces to traverse narrow paths while maintaining balance and stability.
The researchers evaluate their approach through simulations and experiments with the Husky Carbon robot. The results demonstrate the robot's ability to navigate challenging, constrained environments more effectively than traditional methods.
Critical Analysis
The paper presents a well-designed and thorough investigation into the challenges of narrow-path, dynamic walking for quadruped robots. The integration of posture manipulation and thrust vectoring is a promising approach that could have significant implications for robots operating in tight, cluttered spaces.
However, the paper does not discuss the potential limitations of the proposed method. For example, it is unclear how the system would perform in more complex, unstructured environments or when faced with unexpected obstacles or disturbances. Additionally, the computational and hardware requirements of the integrated control framework are not explicitly addressed.
Further research could explore the robustness and scalability of the approach, as well as investigate ways to simplify the control system or reduce the reliance on precise sensor data. Exploring hybrid dynamics modeling and trajectory planning techniques could also help improve the robot's ability to navigate challenging terrain.
Conclusion
This paper presents a novel framework for narrow-path, dynamic walking using a combination of posture manipulation and thrust vectoring. By integrating these two key techniques, the researchers have enabled the Husky Carbon quadruped robot to navigate tight, constrained environments in a stable and controlled manner.
The proposed approach could have significant applications in robotics, particularly for systems operating in cluttered or confined spaces, such as search and rescue missions or industrial inspections. The research also contributes to the broader field of dynamic posture manipulation during complex robotic tasks, which could lead to more agile and adaptable robotic systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Thruster-Assisted Incline Walking
Kaushik Venkatesh Krishnamurthy, Chenghao Wang, Shreyansh Pitroda, Adarsh Salagame, Eric Sihite, Reza Nemovi, Alireza Ramezani, Morteza Gharib
0
0
In this study, our aim is to evaluate the effectiveness of thruster-assisted steep slope walking for the Husky Carbon, a quadrupedal robot equipped with custom-designed actuators and plural electric ducted fans, through simulation prior to conducting experimental trials. Thruster-assisted steep slope walking draws inspiration from wing-assisted incline running (WAIR) observed in birds, and intriguingly incorporates posture manipulation and thrust vectoring, a locomotion technique not previously explored in the animal kingdom. Our approach involves developing a reduced-order model of the Husky robot, followed by the application of an optimization-based controller utilizing collocation methods and dynamics interpolation to determine control actions. Through simulation testing, we demonstrate the feasibility of hardware implementation of our controller.
6/21/2024

Adaptive Gait Modeling and Optimization for Principally Kinematic Systems
Siming Deng, Noah J. Cowan, Brian A. Bittner
0
0
Robotic adaptation to unanticipated operating conditions is crucial to achieving persistence and robustness in complex real world settings. For a wide range of cutting-edge robotic systems, such as micro- and nano-scale robots, soft robots, medical robots, and bio-hybrid robots, it is infeasible to anticipate the operating environment a priori due to complexities that arise from numerous factors including imprecision in manufacturing, chemo-mechanical forces, and poorly understood contact mechanics. Drawing inspiration from data-driven modeling, geometric mechanics (or gauge theory), and adaptive control, we employ an adaptive system identification framework and demonstrate its efficacy in enhancing the performance of principally kinematic locomotors (those governed by Rayleigh dissipation or zero momentum conservation). We showcase the capability of the adaptive model to efficiently accommodate varying terrains and iteratively modified behaviors within a behavior optimization framework. This provides both the ability to improve fundamental behaviors and perform motion tracking to precision. Notably, we are capable of optimizing the gaits of the Purcell swimmer using approximately 10 cycles per link, which for the nine-link Purcell swimmer provides a factor of ten improvement in optimization speed over the state of the art. Beyond simply a computational speed up, this ten-fold improvement may enable this method to be successfully deployed for in-situ behavior refinement, injury recovery, and terrain adaptation, particularly in domains where simulations provide poor guides for the real world.
4/19/2024

Learning Robust Autonomous Navigation and Locomotion for Wheeled-Legged Robots
Joonho Lee, Marko Bjelonic, Alexander Reske, Lorenz Wellhausen, Takahiro Miki, Marco Hutter
0
0
Autonomous wheeled-legged robots have the potential to transform logistics systems, improving operational efficiency and adaptability in urban environments. Navigating urban environments, however, poses unique challenges for robots, necessitating innovative solutions for locomotion and navigation. These challenges include the need for adaptive locomotion across varied terrains and the ability to navigate efficiently around complex dynamic obstacles. This work introduces a fully integrated system comprising adaptive locomotion control, mobility-aware local navigation planning, and large-scale path planning within the city. Using model-free reinforcement learning (RL) techniques and privileged learning, we develop a versatile locomotion controller. This controller achieves efficient and robust locomotion over various rough terrains, facilitated by smooth transitions between walking and driving modes. It is tightly integrated with a learned navigation controller through a hierarchical RL framework, enabling effective navigation through challenging terrain and various obstacles at high speed. Our controllers are integrated into a large-scale urban navigation system and validated by autonomous, kilometer-scale navigation missions conducted in Zurich, Switzerland, and Seville, Spain. These missions demonstrate the system's robustness and adaptability, underscoring the importance of integrated control systems in achieving seamless navigation in complex environments. Our findings support the feasibility of wheeled-legged robots and hierarchical RL for autonomous navigation, with implications for last-mile delivery and beyond.
5/6/2024

Capture Point Control in Thruster-Assisted Bipedal Locomotion
Shreyansh Pitroda, Aditya Bondada, Kaushik Venkatesh Krishnamurthy, Adarsh Salagame, Chenghao Wang, Taoran Liu, Bibek Gupta, Eric Sihite, Reza Nemovi, Alireza Ramezani, Morteza Gharib
0
0
Despite major advancements in control design that are robust to unplanned disturbances, bipedal robots are still susceptible to falling over and struggle to negotiate rough terrains. By utilizing thrusters in our bipedal robot, we can perform additional posture manipulation and expand the modes of locomotion to enhance the robot's stability and ability to negotiate rough and difficult-to-navigate terrains. In this paper, we present our efforts in designing a controller based on capture point control for our thruster-assisted walking model named Harpy and explore its control design possibilities. While capture point control based on centroidal models for bipedal systems has been extensively studied, the incorporation of external forces that can influence the dynamics of linear inverted pendulum models, often used in capture point-based works, has not been explored before. The inclusion of these external forces can lead to interesting interpretations of locomotion, such as virtual buoyancy studied in aquatic-legged locomotion. This paper outlines the dynamical model of our robot, the capture point method we use to assist the upper body stabilization, and the simulation work done to show the controller's feasibility.
6/24/2024