CAV-AD: A Robust Framework for Detection of Anomalous Data and Malicious Sensors in CAV Networks

0

Sign in to get full access
Overview
- Proposes a new framework called "CAV-AD" for detecting anomalous data and malicious sensors in connected autonomous vehicle (CAV) networks
- Focuses on improving the robustness and reliability of CAV systems against cyber-attacks and sensor failures
- Combines various techniques, including anomaly detection, sensor data validation, and data fusion, to enhance the overall security and safety of CAV networks
Plain English Explanation
The paper presents a new framework called "CAV-AD" that aims to improve the security and reliability of connected autonomous vehicle (CAV) networks. CAV systems rely on a complex network of sensors and communication technologies to enable self-driving capabilities, but this also makes them vulnerable to various cyber-attacks and sensor failures.
The CAV-AD framework combines several techniques to address these challenges. It uses anomaly detection to identify unusual or suspicious sensor data that could indicate a problem, such as a malfunctioning sensor or a cyber-attack. It also validates the sensor data to ensure its integrity and accuracy, and uses data fusion to combine information from multiple sensors to get a more reliable and comprehensive understanding of the vehicle's surroundings.
By integrating these techniques, the CAV-AD framework aims to create a more robust and secure CAV system that can better detect and respond to anomalies and malicious activities. This is crucial for ensuring the safety of passengers and other road users, as well as maintaining the overall reliability of autonomous driving technology.
Technical Explanation
The CAV-AD framework proposed in the paper combines several key components to enhance the detection of anomalous data and malicious sensors in CAV networks:
-
Anomaly Detection: The framework employs advanced anomaly detection algorithms to identify sensor data that deviates significantly from the expected or normal patterns. This can help identify potential sensor failures or cyber-attacks, such as zero-day attacks that attempt to exploit unknown vulnerabilities.
-
Sensor Data Validation: The framework includes a module that verifies the integrity and accuracy of sensor data by cross-checking it against data from other sensors and external sources. This helps to detect and mitigate the impact of compromised sensors that may be providing false or manipulated information.
-
Data Fusion: The framework combines data from multiple sensors using advanced data fusion techniques to create a more comprehensive and reliable understanding of the vehicle's surroundings. This helps to improve the overall robustness of the system and reduce the impact of individual sensor failures or attacks.
The paper presents a detailed evaluation of the CAV-AD framework using real-world data and simulations, demonstrating its effectiveness in detecting a range of anomalies and malicious activities in CAV networks. The results show that the framework can achieve high detection rates while maintaining low false positive rates, making it a promising approach for enhancing the security and reliability of autonomous driving technologies.
Critical Analysis
The research presented in the paper addresses an important and timely issue in the field of connected autonomous vehicles (CAVs). The proposed CAV-AD framework offers a comprehensive approach to detecting anomalous data and malicious sensors, which is crucial for ensuring the safety and reliability of CAV systems.
One of the strengths of the framework is its multi-pronged approach, combining anomaly detection, sensor data validation, and data fusion techniques. This allows the system to detect a wide range of potential threats, from sensor failures to cyber-attacks. The authors have also carefully evaluated the framework using realistic datasets and simulations, providing a robust evaluation of its performance.
However, the paper does not fully address the potential limitations and challenges of the proposed approach. For example, the authors do not discuss the computational and resource requirements of the framework, which could be a concern for real-world deployment in resource-constrained CAV systems. Additionally, the paper does not explore the potential for adversarial attacks against the anomaly detection or data fusion components, which could be a significant vulnerability.
Further research is needed to address these limitations and explore the long-term sustainability and scalability of the CAV-AD framework. Nonetheless, the overall approach presented in the paper represents an important step forward in enhancing the security and reliability of connected autonomous vehicle systems.
Conclusion
The CAV-AD framework proposed in this paper offers a promising approach for detecting anomalous data and malicious sensors in connected autonomous vehicle (CAV) networks. By combining advanced anomaly detection, sensor data validation, and data fusion techniques, the framework aims to improve the overall robustness and reliability of CAV systems against cyber-attacks and sensor failures.
The detailed evaluation of the framework using real-world data and simulations demonstrates its effectiveness in identifying a range of anomalies and malicious activities. This is a crucial step in ensuring the safety and trustworthiness of autonomous driving technologies, which are becoming increasingly important as CAVs become more prevalent on our roads.
While the paper does not fully address all the potential limitations and challenges of the CAV-AD framework, it represents an important contribution to the ongoing efforts to enhance the security and reliability of CAV systems. Further research and development in this area will be essential as autonomous driving technologies continue to evolve and become more widely adopted.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CAV-AD: A Robust Framework for Detection of Anomalous Data and Malicious Sensors in CAV Networks
Md Sazedur Rahman, Mohamed Elmahallawy, Sanjay Madria, Samuel Frimpong
The adoption of connected and automated vehicles (CAVs) has sparked considerable interest across diverse industries, including public transportation, underground mining, and agriculture sectors. However, CAVs' reliance on sensor readings makes them vulnerable to significant threats. Manipulating these readings can compromise CAV network security, posing serious risks for malicious activities. Although several anomaly detection (AD) approaches for CAV networks are proposed, they often fail to: i) detect multiple anomalies in specific sensor(s) with high accuracy or F1 score, and ii) identify the specific sensor being attacked. In response, this paper proposes a novel framework tailored to CAV networks, called CAV-AD, for distinguishing abnormal readings amidst multiple anomaly data while identifying malicious sensors. Specifically, CAV-AD comprises two main components: i) A novel CNN model architecture called optimized omni-scale CNN (O-OS-CNN), which optimally selects the time scale by generating all possible kernel sizes for input time series data; ii) An amplification block to increase the values of anomaly readings, enhancing sensitivity for detecting anomalies. Not only that, but CAV-AD integrates the proposed O-OS-CNN with a Kalman filter to instantly identify the malicious sensors. We extensively train CAV-AD using real-world datasets containing both instant and constant attacks, evaluating its performance in detecting intrusions from multiple anomalies, which presents a more challenging scenario. Our results demonstrate that CAV-AD outperforms state-of-the-art methods, achieving an average accuracy of 98% and an average F1 score of 89%, while accurately identifying the malicious sensors.
Read more7/9/2024

0
Enhanced Anomaly Detection in Automotive Systems Using SAAD: Statistical Aggregated Anomaly Detection
Dacian Goina, Eduard Hogea, George Maties
This paper presents a novel anomaly detection methodology termed Statistical Aggregated Anomaly Detection (SAAD). The SAAD approach integrates advanced statistical techniques with machine learning, and its efficacy is demonstrated through validation on real sensor data from a Hardware-in-the-Loop (HIL) environment within the automotive domain. The key innovation of SAAD lies in its ability to significantly enhance the accuracy and robustness of anomaly detection when combined with Fully Connected Networks (FCNs) augmented by dropout layers. Comprehensive experimental evaluations indicate that the standalone statistical method achieves an accuracy of 72.1%, whereas the deep learning model alone attains an accuracy of 71.5%. In contrast, the aggregated method achieves a superior accuracy of 88.3% and an F1 score of 0.921, thereby outperforming the individual models. These results underscore the effectiveness of SAAD, demonstrating its potential for broad application in various domains, including automotive systems.
Read more6/14/2024
❗
0
Systematic Review: Anomaly Detection in Connected and Autonomous Vehicles
J. R. V. Solaas, N. Tuptuk, E. Mariconti
This systematic review focuses on anomaly detection for connected and autonomous vehicles. The initial database search identified 2160 articles, of which 203 were included in this review after rigorous screening and assessment. This study revealed that the most commonly used Artificial Intelligence (AI) algorithms employed in anomaly detection are neural networks like LSTM, CNN, and autoencoders, alongside one-class SVM. Most anomaly-based models were trained using real-world operational vehicle data, although anomalies, such as attacks and faults, were often injected artificially into the datasets. These models were evaluated mostly using five key evaluation metrics: recall, accuracy, precision, F1-score, and false positive rate. The most frequently used selection of evaluation metrics used for anomaly detection models were accuracy, precision, recall, and F1-score. This systematic review presents several recommendations. First, there is a need to incorporate multiple evaluation metrics to provide a comprehensive assessment of the anomaly detection models. Second, only a small proportion of the studies have made their models open source, indicating a need to share models publicly to facilitate collaboration within the research community, and to validate and compare findings effectively. Third, there is a need for benchmarking datasets with predefined anomalies or cyberattacks to test and improve the effectiveness of the proposed anomaly-based detection models. Furthermore, there is a need for future research to investigate the deployment of anomaly detection to a vehicle to assess its performance on the road. There is a notable lack of research done on intrusion detection systems using different protocols to CAN, such as Ethernet and FlexRay.
Read more5/7/2024
0
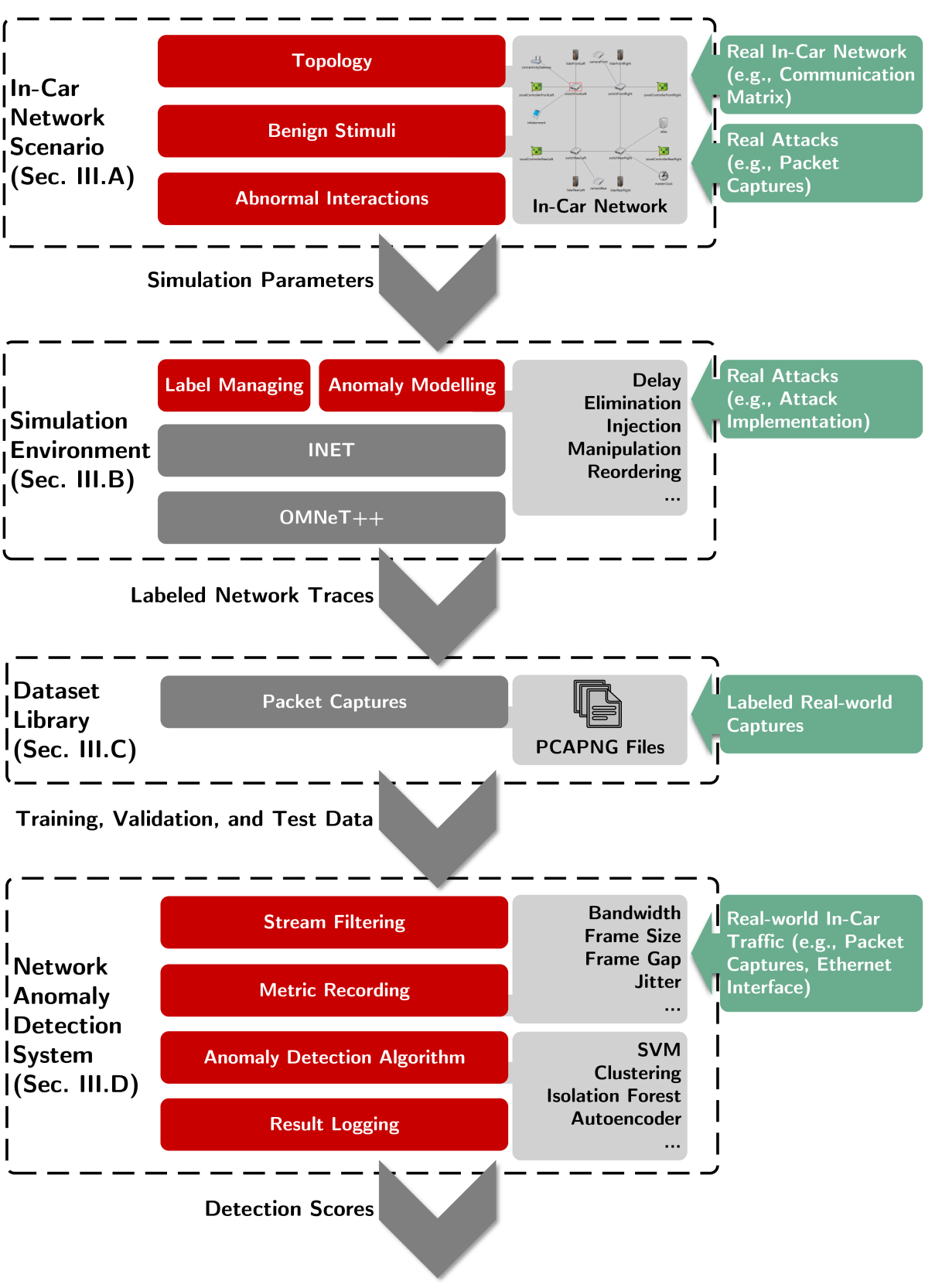
A Framework for the Systematic Assessment of Anomaly Detectors in Time-Sensitive Automotive Networks
Philipp Meyer, Timo Hackel, Teresa Lubeck, Franz Korf, Thomas C. Schmidt
Connected cars are susceptible to cyberattacks. Security and safety of future vehicles highly depend on a holistic protection of automotive components, of which the time-sensitive backbone network takes a significant role. These onboard Time-Sensitive Networks (TSNs) require monitoring for safety and -- as versatile platforms to host Network Anomaly Detection Systems (NADSs) -- for security. Still a thorough evaluation of anomaly detection methods in the context of hard real-time operations, automotive protocol stacks, and domain specific attack vectors is missing along with appropriate input datasets. In this paper, we present an assessment framework that allows for reproducible, comparable, and rapid evaluation of detection algorithms. It is based on a simulation toolchain, which contributes configurable topologies, traffic streams, anomalies, attacks, and detectors. We demonstrate the assessment of NADSs in a comprehensive in-vehicular network with its communication flows, on which we model traffic anomalies. We evaluate exemplary detection mechanisms and reveal how the detection performance is influenced by different combinations of TSN traffic flows and anomaly types. Our approach translates to other real-time Ethernet domains, such as industrial facilities, airplanes, and UAVs.
Read more5/3/2024