COLMAP-Free 3D Gaussian Splatting

0

Sign in to get full access
Overview
- This paper presents a new method for 3D reconstruction using Gaussian splatting that does not require the COLMAP software.
- The proposed approach can generate high-quality 3D models from multi-view images without relying on COLMAP's complex pipeline.
- The method is more efficient and computationally less expensive compared to COLMAP, making it suitable for real-time applications.
Plain English Explanation
The paper introduces a new way to create 3D models from multiple camera views without using the COLMAP software. COLMAP is a popular tool for this task, but it can be complex and computationally intensive. The new method uses 3D Gaussian Splatting to generate high-quality 3D models more efficiently. This makes it suitable for real-time applications where COLMAP may be too slow. The key idea is to represent the 3D scene as a set of Gaussian "splats" that can be rendered quickly, rather than relying on COLMAP's more complex reconstruction pipeline.
Technical Explanation
The paper proposes a 3D Gaussian Splatting approach for 3D reconstruction that does not require the COLMAP software. 3D Gaussian Splatting is a technique that represents 3D points as Gaussian distributions, which can be rendered efficiently.
The method first extracts 2D keypoints from the input images and matches them across views. It then triangulates the 3D positions of these keypoints to obtain an initial sparse 3D point cloud. 3D Gaussian Splatting is then used to convert this sparse point cloud into a dense 3D model by representing each point as a Gaussian splat. The size and intensity of each splat is determined by the local point density, allowing the method to capture fine details without the complexity of COLMAP's reconstruction pipeline.
The paper demonstrates that this COLMAP-free approach can generate high-quality 3D models more efficiently than COLMAP, making it suitable for real-time applications. The authors evaluate the method on several benchmark datasets and show that it achieves comparable or better performance than COLMAP in terms of reconstruction accuracy and completeness.
Critical Analysis
The paper provides a viable alternative to COLMAP for 3D reconstruction that is more efficient and less computationally expensive. This is a significant contribution, as COLMAP can be slow and resource-intensive, especially for real-time applications.
However, the paper does not address some potential limitations of the Gaussian splatting approach. For example, the method may struggle to accurately represent sharp edges or discontinuities in the 3D geometry, which could lead to artifacts in the final reconstruction. Additionally, the paper does not explore the robustness of the method to noisy or incomplete input data, which is an important consideration for real-world applications.
Further research could investigate ways to improve the accuracy and robustness of the Gaussian splatting approach, such as by incorporating additional constraints or optimization techniques. The authors could also explore the integration of the method with other 3D reconstruction techniques to create a more comprehensive and versatile 3D modeling pipeline.
Conclusion
This paper presents a novel COLMAP-free 3D reconstruction method based on 3D Gaussian Splatting. The approach is more efficient and computationally less expensive than COLMAP, making it suitable for real-time applications. The authors demonstrate that the method can generate high-quality 3D models with comparable or better performance than COLMAP on benchmark datasets.
While the paper provides a valuable contribution to the field of 3D reconstruction, there are still opportunities for further research to address potential limitations and enhance the robustness and accuracy of the Gaussian splatting approach. Overall, the work represents an important step towards more efficient and accessible 3D modeling solutions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
COLMAP-Free 3D Gaussian Splatting
Yang Fu, Sifei Liu, Amey Kulkarni, Jan Kautz, Alexei A. Efros, Xiaolong Wang
While neural rendering has led to impressive advances in scene reconstruction and novel view synthesis, it relies heavily on accurately pre-computed camera poses. To relax this constraint, multiple efforts have been made to train Neural Radiance Fields (NeRFs) without pre-processed camera poses. However, the implicit representations of NeRFs provide extra challenges to optimize the 3D structure and camera poses at the same time. On the other hand, the recently proposed 3D Gaussian Splatting provides new opportunities given its explicit point cloud representations. This paper leverages both the explicit geometric representation and the continuity of the input video stream to perform novel view synthesis without any SfM preprocessing. We process the input frames in a sequential manner and progressively grow the 3D Gaussians set by taking one input frame at a time, without the need to pre-compute the camera poses. Our method significantly improves over previous approaches in view synthesis and camera pose estimation under large motion changes. Our project page is https://oasisyang.github.io/colmap-free-3dgs
Read more7/31/2024

0
Self-Calibrating 4D Novel View Synthesis from Monocular Videos Using Gaussian Splatting
Fang Li, Hao Zhang, Narendra Ahuja
Gaussian Splatting (GS) has significantly elevated scene reconstruction efficiency and novel view synthesis (NVS) accuracy compared to Neural Radiance Fields (NeRF), particularly for dynamic scenes. However, current 4D NVS methods, whether based on GS or NeRF, primarily rely on camera parameters provided by COLMAP and even utilize sparse point clouds generated by COLMAP for initialization, which lack accuracy as well are time-consuming. This sometimes results in poor dynamic scene representation, especially in scenes with large object movements, or extreme camera conditions e.g. small translations combined with large rotations. Some studies simultaneously optimize the estimation of camera parameters and scenes, supervised by additional information like depth, optical flow, etc. obtained from off-the-shelf models. Using this unverified information as ground truth can reduce robustness and accuracy, which does frequently occur for long monocular videos (with e.g. > hundreds of frames). We propose a novel approach that learns a high-fidelity 4D GS scene representation with self-calibration of camera parameters. It includes the extraction of 2D point features that robustly represent 3D structure, and their use for subsequent joint optimization of camera parameters and 3D structure towards overall 4D scene optimization. We demonstrate the accuracy and time efficiency of our method through extensive quantitative and qualitative experimental results on several standard benchmarks. The results show significant improvements over state-of-the-art methods for 4D novel view synthesis. The source code will be released soon at https://github.com/fangli333/SC-4DGS.
Read more7/12/2024

0
Correspondence-Guided SfM-Free 3D Gaussian Splatting for NVS
Wei Sun, Xiaosong Zhang, Fang Wan, Yanzhao Zhou, Yuan Li, Qixiang Ye, Jianbin Jiao
Novel View Synthesis (NVS) without Structure-from-Motion (SfM) pre-processed camera poses--referred to as SfM-free methods--is crucial for promoting rapid response capabilities and enhancing robustness against variable operating conditions. Recent SfM-free methods have integrated pose optimization, designing end-to-end frameworks for joint camera pose estimation and NVS. However, most existing works rely on per-pixel image loss functions, such as L2 loss. In SfM-free methods, inaccurate initial poses lead to misalignment issue, which, under the constraints of per-pixel image loss functions, results in excessive gradients, causing unstable optimization and poor convergence for NVS. In this study, we propose a correspondence-guided SfM-free 3D Gaussian splatting for NVS. We use correspondences between the target and the rendered result to achieve better pixel alignment, facilitating the optimization of relative poses between frames. We then apply the learned poses to optimize the entire scene. Each 2D screen-space pixel is associated with its corresponding 3D Gaussians through approximated surface rendering to facilitate gradient back propagation. Experimental results underline the superior performance and time efficiency of the proposed approach compared to the state-of-the-art baselines.
Read more8/19/2024
0
SparseGS: Real-Time 360{deg} Sparse View Synthesis using Gaussian Splatting
Haolin Xiong, Sairisheek Muttukuru, Rishi Upadhyay, Pradyumna Chari, Achuta Kadambi
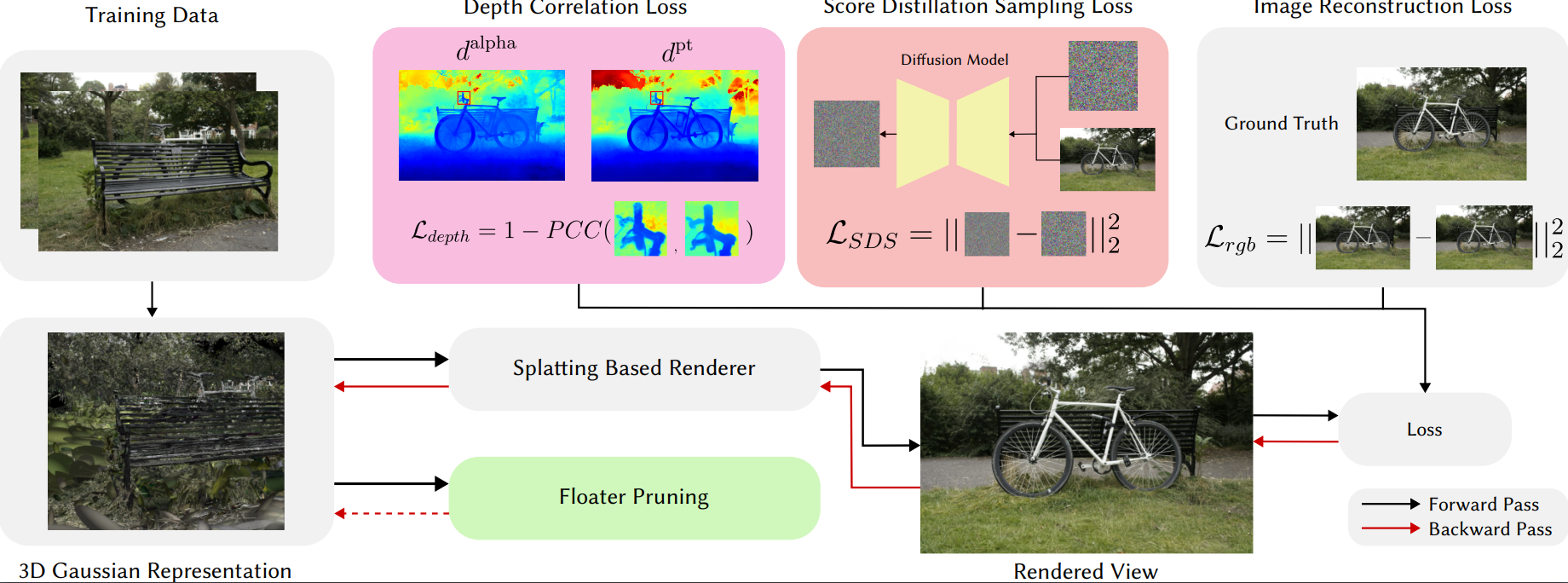
The problem of novel view synthesis has grown significantly in popularity recently with the introduction of Neural Radiance Fields (NeRFs) and other implicit scene representation methods. A recent advance, 3D Gaussian Splatting (3DGS), leverages an explicit representation to achieve real-time rendering with high-quality results. However, 3DGS still requires an abundance of training views to generate a coherent scene representation. In few shot settings, similar to NeRF, 3DGS tends to overfit to training views, causing background collapse and excessive floaters, especially as the number of training views are reduced. We propose a method to enable training coherent 3DGS-based radiance fields of 360-degree scenes from sparse training views. We integrate depth priors with generative and explicit constraints to reduce background collapse, remove floaters, and enhance consistency from unseen viewpoints. Experiments show that our method outperforms base 3DGS by 6.4% in LPIPS and by 12.2% in PSNR, and NeRF-based methods by at least 17.6% in LPIPS on the MipNeRF-360 dataset with substantially less training and inference cost.
Read more5/14/2024