A competitive baseline for deep learning enhanced data assimilation using conditional Gaussian ensemble Kalman filtering

0
Sign in to get full access
Overview
- This paper introduces a deep learning-enhanced data assimilation method using conditional Gaussian ensemble Kalman filtering.
- The method aims to improve the performance of traditional ensemble Kalman filtering techniques in high-dimensional, nonlinear systems.
- The authors propose a conditional Gaussian ensemble Kalman filtering approach that integrates deep neural networks to learn the nonlinear mapping between observations and the true state.
Plain English Explanation
The paper explores a way to enhance the performance of a common data analysis technique called ensemble Kalman filtering. Ensemble Kalman filtering is used to estimate the state of complex, dynamic systems like weather or climate models based on limited observations.
The key idea is to use deep neural networks to learn the relationship between the observations and the true underlying state of the system. This learned mapping is then incorporated into the ensemble Kalman filtering process, allowing it to better handle the nonlinear and high-dimensional nature of real-world systems.
By leveraging the pattern recognition capabilities of deep learning, the authors aim to create a more accurate and robust data assimilation method compared to traditional ensemble Kalman filtering approaches. This could lead to improvements in fields like weather forecasting, climate modeling, and other applications where effectively incorporating observational data is crucial.
Technical Explanation
The paper introduces a conditional Gaussian ensemble Kalman filtering approach that integrates deep neural networks. The core idea is to use the neural network to learn the nonlinear mapping between the observations and the true state of the system, and then incorporate this learned mapping into the ensemble Kalman filtering framework.
The authors first describe the general ensemble Kalman filtering algorithm, which uses an ensemble of model states to estimate the mean and covariance of the true state. They then propose the conditional Gaussian ensemble Kalman filter, where the neural network is used to model the conditional distribution of the true state given the observations.
The key steps of the method are:
- Initialize an ensemble of model states
- Use the neural network to predict the conditional mean and covariance of the true state given the observations
- Update the ensemble mean and covariance based on the conditional Gaussian distribution
- Evolve the ensemble forward in time using the model dynamics
The authors demonstrate the effectiveness of their approach on several high-dimensional, nonlinear benchmark problems, showing improved performance compared to traditional ensemble Kalman filtering methods.
Critical Analysis
The paper presents a promising approach for enhancing the performance of ensemble Kalman filtering through the integration of deep learning. The authors acknowledge that while the conditional Gaussian ensemble Kalman filter can handle nonlinear and high-dimensional systems better than standard methods, there are still some limitations.
One potential issue is the reliance on the neural network's ability to accurately model the conditional distribution of the true state. If the network fails to capture the true underlying relationships, the performance of the data assimilation method may suffer. The authors mention the need for further research on improving the neural network architecture and training procedures to address this challenge.
Additionally, the paper does not explore the computational complexity and runtime implications of the proposed method compared to traditional ensemble Kalman filtering. As the inclusion of a neural network adds an additional computational burden, this aspect may be an important consideration for real-world applications with strict time constraints.
Despite these caveats, the research presented in the paper represents a valuable contribution to the field of data assimilation, demonstrating the potential of deep learning-enhanced techniques to improve the handling of nonlinear and high-dimensional systems. Further investigations into the robustness, scalability, and practical implications of the conditional Gaussian ensemble Kalman filter could lead to significant advancements in areas like weather forecasting, climate modeling, and beyond.
Conclusion
This paper introduces a deep learning-enhanced data assimilation method that integrates conditional Gaussian ensemble Kalman filtering. By leveraging the pattern recognition capabilities of neural networks, the authors aim to create a more accurate and robust approach to estimating the state of complex, nonlinear systems based on limited observational data.
The proposed conditional Gaussian ensemble Kalman filter shows promising results on benchmark problems, outperforming traditional ensemble Kalman filtering techniques. However, the method still has some limitations, such as the reliance on the neural network's ability to accurately model the conditional distribution of the true state.
Further research is needed to address these challenges and explore the practical implications of the approach, including its computational complexity and runtime performance. Nonetheless, this work represents an important step towards the integration of deep learning and data assimilation, with the potential to drive significant advancements in fields like weather forecasting, climate modeling, and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A competitive baseline for deep learning enhanced data assimilation using conditional Gaussian ensemble Kalman filtering
Zachariah Malik, Romit Maulik
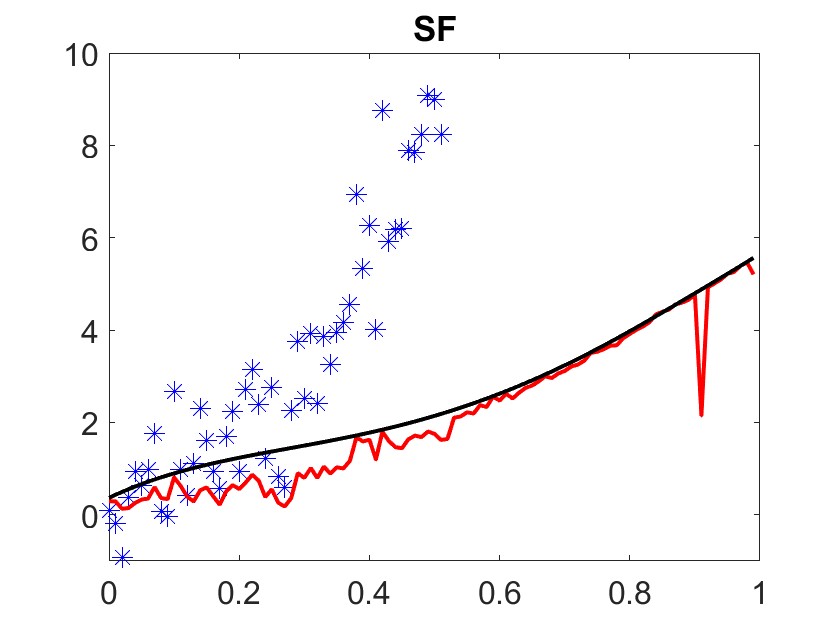
Ensemble Kalman Filtering (EnKF) is a popular technique for data assimilation, with far ranging applications. However, the vanilla EnKF framework is not well-defined when perturbations are nonlinear. We study two non-linear extensions of the vanilla EnKF - dubbed the conditional-Gaussian EnKF (CG-EnKF) and the normal score EnKF (NS-EnKF) - which sidestep assumptions of linearity by constructing the Kalman gain matrix with the `conditional Gaussian' update formula in place of the traditional one. We then compare these models against a state-of-the-art deep learning based particle filter called the score filter (SF). This model uses an expensive score diffusion model for estimating densities and also requires a strong assumption on the perturbation operator for validity. In our comparison, we find that CG-EnKF and NS-EnKF dramatically outperform SF for a canonical problem in high-dimensional multiscale data assimilation given by the Lorenz-96 system. Our analysis also demonstrates that the CG-EnKF and NS-EnKF can handle highly non-Gaussian additive noise perturbations, with the latter typically outperforming the former.
Read more9/24/2024

0
Ensemble Kalman Filtering Meets Gaussian Process SSM for Non-Mean-Field and Online Inference
Zhidi Lin, Yiyong Sun, Feng Yin, Alexandre Hoang Thi'ery
The Gaussian process state-space models (GPSSMs) represent a versatile class of data-driven nonlinear dynamical system models. However, the presence of numerous latent variables in GPSSM incurs unresolved issues for existing variational inference approaches, particularly under the more realistic non-mean-field (NMF) assumption, including extensive training effort, compromised inference accuracy, and infeasibility for online applications, among others. In this paper, we tackle these challenges by incorporating the ensemble Kalman filter (EnKF), a well-established model-based filtering technique, into the NMF variational inference framework to approximate the posterior distribution of the latent states. This novel marriage between EnKF and GPSSM not only eliminates the need for extensive parameterization in learning variational distributions, but also enables an interpretable, closed-form approximation of the evidence lower bound (ELBO). Moreover, owing to the streamlined parameterization via the EnKF, the new GPSSM model can be easily accommodated in online learning applications. We demonstrate that the resulting EnKF-aided online algorithm embodies a principled objective function by ensuring data-fitting accuracy while incorporating model regularizations to mitigate overfitting. We also provide detailed analysis and fresh insights for the proposed algorithms. Comprehensive evaluation across diverse real and synthetic datasets corroborates the superior learning and inference performance of our EnKF-aided variational inference algorithms compared to existing methods.
Read more7/23/2024
👁️
0
An Ensemble Score Filter for Tracking High-Dimensional Nonlinear Dynamical Systems
Feng Bao, Zezhong Zhang, Guannan Zhang
We propose an ensemble score filter (EnSF) for solving high-dimensional nonlinear filtering problems with superior accuracy. A major drawback of existing filtering methods, e.g., particle filters or ensemble Kalman filters, is the low accuracy in handling high-dimensional and highly nonlinear problems. EnSF attacks this challenge by exploiting the score-based diffusion model, defined in a pseudo-temporal domain, to characterizing the evolution of the filtering density. EnSF stores the information of the recursively updated filtering density function in the score function, instead of storing the information in a set of finite Monte Carlo samples (used in particle filters and ensemble Kalman filters). Unlike existing diffusion models that train neural networks to approximate the score function, we develop a training-free score estimation that uses a mini-batch-based Monte Carlo estimator to directly approximate the score function at any pseudo-spatial-temporal location, which provides sufficient accuracy in solving high-dimensional nonlinear problems as well as saves a tremendous amount of time spent on training neural networks. High-dimensional Lorenz-96 systems are used to demonstrate the performance of our method. EnSF provides surprising performance, compared with the state-of-the-art Local Ensemble Transform Kalman Filter method, in reliably and efficiently tracking extremely high-dimensional Lorenz systems (up to 1,000,000 dimensions) with highly nonlinear observation processes.
Read more8/14/2024

0
Latent-EnSF: A Latent Ensemble Score Filter for High-Dimensional Data Assimilation with Sparse Observation Data
Phillip Si, Peng Chen
Accurate modeling and prediction of complex physical systems often rely on data assimilation techniques to correct errors inherent in model simulations. Traditional methods like the Ensemble Kalman Filter (EnKF) and its variants as well as the recently developed Ensemble Score Filters (EnSF) face significant challenges when dealing with high-dimensional and nonlinear Bayesian filtering problems with sparse observations, which are ubiquitous in real-world applications. In this paper, we propose a novel data assimilation method, Latent-EnSF, which leverages EnSF with efficient and consistent latent representations of the full states and sparse observations to address the joint challenges of high dimensionlity in states and high sparsity in observations for nonlinear Bayesian filtering. We introduce a coupled Variational Autoencoder (VAE) with two encoders to encode the full states and sparse observations in a consistent way guaranteed by a latent distribution matching and regularization as well as a consistent state reconstruction. With comparison to several methods, we demonstrate the higher accuracy, faster convergence, and higher efficiency of Latent-EnSF for two challenging applications with complex models in shallow water wave propagation and medium-range weather forecasting, for highly sparse observations in both space and time.
Read more9/12/2024