A Comprehensive Review of 3D Object Detection in Autonomous Driving: Technological Advances and Future Directions

0

Sign in to get full access
Overview
- This paper presents an example section with a subsection and subsubsection.
- The paper demonstrates the usage of various HTML elements and formatting.
- It includes a table of contents and links to different sections of the document.
Plain English Explanation
The provided paper appears to be a technical document that demonstrates the structure and formatting of an academic paper. It contains an [object Object] with a [object Object] and a [object Object] subsubsection. The paper includes a table of contents that allows readers to navigate to different sections of the document easily.
The document uses various HTML elements, such as <nav>, <ol>, and <li>, to create the table of contents and organize the content. It also includes links to external resources, such as Bootstrap and HTML2Canvas libraries, which are likely used to style and enhance the presentation of the document.
Overall, this paper seems to be a template or example for creating technical documents with a specific structure and formatting.
Technical Explanation
The paper begins with a <head> section that includes metadata, such as the character encoding, viewport settings, and links to external CSS and JavaScript files. The <body> section contains a navigation bar with a table of contents.
The table of contents is created using an ordered list (<ol>) with list items (<li>) representing the different sections and subsections. Each section and subsection is linked using the <a> element with the ltx_ref class, which likely corresponds to internal links within the document.
The [object Object] contains a [object Object], which in turn contains a [object Object] subsubsection. These sections and subsections are defined using appropriate HTML elements, such as <section> and <subsection>.
The document also includes external dependencies, such as the Bootstrap CSS and JavaScript libraries, as well as the HTML2Canvas library, which are likely used to enhance the visual presentation and interactivity of the document.
Critical Analysis
The provided paper appears to be a template or example document and does not contain any substantial technical content or research findings. While it demonstrates the proper structure and formatting of an academic paper, it does not provide any insights or contributions to a specific field of study.
One potential limitation of this paper is that it may not be representative of the content and structure of a typical research paper. The focus on demonstrating HTML elements and formatting may overshadow the importance of clear and concise communication of research ideas, methods, and findings.
Additionally, the heavy reliance on external libraries and resources could be a potential concern, as it may introduce dependencies and potential compatibility issues, which may not be desirable in a production-ready academic paper.
Conclusion
The provided paper is a template or example document that showcases the structure and formatting of an academic paper. It demonstrates the use of HTML elements, table of contents, and links to navigate the document. While this type of document can be useful for learning or as a starting point for creating new papers, it does not contain any substantial technical content or research findings. To create a meaningful and impactful academic paper, it is crucial to focus on clearly communicating the research objectives, methods, results, and implications, while maintaining a clean and accessible presentation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Comprehensive Review of 3D Object Detection in Autonomous Driving: Technological Advances and Future Directions
Yu Wang, Shaohua Wang, Yicheng Li, Mingchun Liu
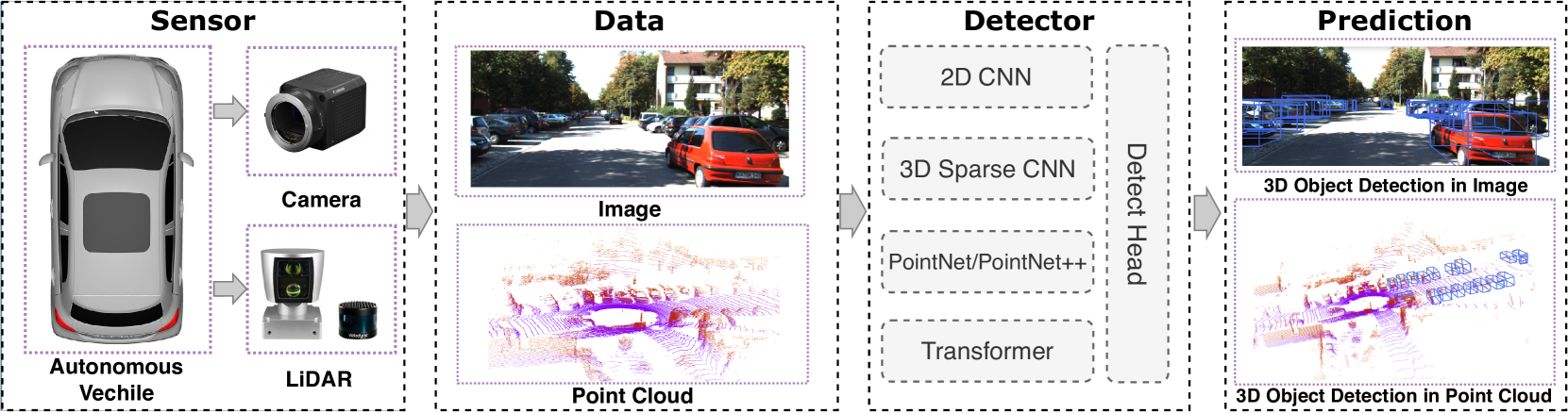
In recent years, 3D object perception has become a crucial component in the development of autonomous driving systems, providing essential environmental awareness. However, as perception tasks in autonomous driving evolve, their variants have increased, leading to diverse insights from industry and academia. Currently, there is a lack of comprehensive surveys that collect and summarize these perception tasks and their developments from a broader perspective. This review extensively summarizes traditional 3D object detection methods, focusing on camera-based, LiDAR-based, and fusion detection techniques. We provide a comprehensive analysis of the strengths and limitations of each approach, highlighting advancements in accuracy and robustness. Furthermore, we discuss future directions, including methods to improve accuracy such as temporal perception, occupancy grids, and end-to-end learning frameworks. We also explore cooperative perception methods that extend the perception range through collaborative communication. By providing a holistic view of the current state and future developments in 3D object perception, we aim to offer a more comprehensive understanding of perception tasks for autonomous driving. Additionally, we have established an active repository to provide continuous updates on the latest advancements in this field, accessible at: https://github.com/Fishsoup0/Autonomous-Driving-Perception.
Read more8/30/2024
0
Robustness-Aware 3D Object Detection in Autonomous Driving: A Review and Outlook
Ziying Song, Lin Liu, Feiyang Jia, Yadan Luo, Guoxin Zhang, Lei Yang, Li Wang, Caiyan Jia
In the realm of modern autonomous driving, the perception system is indispensable for accurately assessing the state of the surrounding environment, thereby enabling informed prediction and planning. The key step to this system is related to 3D object detection that utilizes vehicle-mounted sensors such as LiDAR and cameras to identify the size, the category, and the location of nearby objects. Despite the surge in 3D object detection methods aimed at enhancing detection precision and efficiency, there is a gap in the literature that systematically examines their resilience against environmental variations, noise, and weather changes. This study emphasizes the importance of robustness, alongside accuracy and latency, in evaluating perception systems under practical scenarios. Our work presents an extensive survey of camera-only, LiDAR-only, and multi-modal 3D object detection algorithms, thoroughly evaluating their trade-off between accuracy, latency, and robustness, particularly on datasets like KITTI-C and nuScenes-C to ensure fair comparisons. Among these, multi-modal 3D detection approaches exhibit superior robustness, and a novel taxonomy is introduced to reorganize the literature for enhanced clarity. This survey aims to offer a more practical perspective on the current capabilities and the constraints of 3D object detection algorithms in real-world applications, thus steering future research towards robustness-centric advancements.
Read more8/16/2024
🖼️
0
A Survey on Occupancy Perception for Autonomous Driving: The Information Fusion Perspective
Huaiyuan Xu, Junliang Chen, Shiyu Meng, Yi Wang, Lap-Pui Chau
3D occupancy perception technology aims to observe and understand dense 3D environments for autonomous vehicles. Owing to its comprehensive perception capability, this technology is emerging as a trend in autonomous driving perception systems, and is attracting significant attention from both industry and academia. Similar to traditional bird's-eye view (BEV) perception, 3D occupancy perception has the nature of multi-source input and the necessity for information fusion. However, the difference is that it captures vertical structures that are ignored by 2D BEV. In this survey, we review the most recent works on 3D occupancy perception, and provide in-depth analyses of methodologies with various input modalities. Specifically, we summarize general network pipelines, highlight information fusion techniques, and discuss effective network training. We evaluate and analyze the occupancy perception performance of the state-of-the-art on the most popular datasets. Furthermore, challenges and future research directions are discussed. We hope this paper will inspire the community and encourage more research work on 3D occupancy perception. A comprehensive list of studies in this survey is publicly available in an active repository that continuously collects the latest work: https://github.com/HuaiyuanXu/3D-Occupancy-Perception.
Read more7/23/2024
👀
0
Applications of Computer Vision in Autonomous Vehicles: Methods, Challenges and Future Directions
Xingshuai Dong, Massimiliano L. Cappuccio
Autonomous vehicle refers to a vehicle capable of perceiving its surrounding environment and driving with little or no human driver input. The perception system is a fundamental component which enables the autonomous vehicle to collect data and extract relevant information from the environment to drive safely. Benefit from the recent advances in computer vision, the perception task can be achieved by using sensors, such as camera, LiDAR, radar, and ultrasonic sensor. This paper reviews publications on computer vision and autonomous driving that are published during the last ten years. In particular, we first investigate the development of autonomous driving systems and summarize these systems that are developed by the major automotive manufacturers from different countries. Second, we investigate the sensors and benchmark data sets that are commonly utilized for autonomous driving. Then, a comprehensive overview of computer vision applications for autonomous driving such as depth estimation, object detection, lane detection, and traffic sign recognition are discussed. Additionally, we review public opinions and concerns on autonomous vehicles. Based on the discussion, we analyze the current technological challenges that autonomous vehicles meet with. Finally, we present our insights and point out some promising directions for future research. This paper will help the reader to understand autonomous vehicles from the perspectives of academia and industry.
Read more6/18/2024