Constraint-Informed Learning for Warm Starting Trajectory Optimization

0

Sign in to get full access
Overview
- Presents a method for warm-starting trajectory optimization using constraint-informed learning
- Aims to improve the convergence and performance of trajectory optimization by leveraging prior solutions
- Demonstrates the approach on a simulated quadrotor navigation task
Plain English Explanation
The paper discusses a technique called "constraint-informed learning" that can help make trajectory optimization algorithms more efficient. Trajectory optimization is the process of finding the best path for a robot or system to move from one point to another while obeying various constraints, such as avoiding obstacles.
The key insight is that prior solutions to similar optimization problems can provide valuable information to "warm start" the optimization process, helping it converge faster and find better solutions. The researchers train a neural network model to learn a "solution map" that captures how the optimal trajectory changes as the problem parameters (e.g., start/end points, obstacles) are varied.
By using this learned solution map to initialize the trajectory optimization, the algorithm can start much closer to the final solution, rather than having to search blindly from scratch. The researchers demonstrate this approach on a simulated quadrotor navigation task, showing it can significantly improve the speed and quality of the optimized trajectories compared to a cold-start optimization.
Technical Explanation
The paper proposes a "constraint-informed learning" approach to warm-start trajectory optimization. The core idea is to train a neural network model to learn a "solution map" that captures how the optimal trajectory changes as the problem parameters (e.g., start/end points, obstacles) are varied.
Specifically, the authors first collect a dataset of solutions to related trajectory optimization problems, where each problem instance is characterized by its parameters (start, goal, obstacles, etc.) and the corresponding optimal trajectory. They then train a neural network to learn a mapping from the problem parameters to the optimal trajectory.
During the actual trajectory optimization process, this learned solution map is used to provide a good initial guess for the optimization algorithm, rather than starting from a random point. The authors show that this "warm start" approach can significantly improve the convergence speed and quality of the optimized trajectories, compared to a traditional "cold start" optimization.
They evaluate the approach on a simulated quadrotor navigation task, where the quadrotor must plan a collision-free trajectory to move between different start and goal positions while avoiding obstacles. The results demonstrate that the constraint-informed learning method can produce trajectories that are shorter and more efficient than those obtained through cold-start optimization.
Critical Analysis
The paper presents a promising approach for improving the performance of trajectory optimization through the use of constraint-informed learning. By leveraging prior solutions to related problems, the method can provide a good initial guess for the optimization algorithm, helping it converge faster and find better solutions.
One potential limitation of the approach is that it relies on the availability of a dataset of previous solutions to train the solution map model. In some scenarios, such a dataset may not be readily available, and the researchers would need to generate it through additional optimization runs. This could limit the practical applicability of the method in certain domains.
Additionally, the paper does not explore the scalability of the approach as the complexity of the trajectory optimization problem increases, such as with higher-dimensional systems or more complex constraints. Further research may be needed to understand the limits of the method and how it performs in more challenging scenarios.
Finally, the paper could have delved deeper into the interpretability and explainability of the learned solution map model. Understanding the underlying patterns and relationships captured by the model could provide valuable insights for improving trajectory optimization algorithms and their applications.
Conclusion
The paper presents a novel approach for warm-starting trajectory optimization using constraint-informed learning. By training a neural network to learn a solution map that captures how the optimal trajectory changes with problem parameters, the method can significantly improve the convergence speed and quality of the optimized trajectories compared to a traditional cold-start optimization.
The results on a simulated quadrotor navigation task demonstrate the potential of this approach to enhance the efficiency and reliability of trajectory optimization in robotics and other domains. While the method has some limitations, it represents an important step towards developing more intelligent and adaptive trajectory planning algorithms that can leverage prior knowledge and experience to solve complex control problems more effectively.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Constraint-Informed Learning for Warm Starting Trajectory Optimization
Julia Briden, Changrak Choi, Kyongsik Yun, Richard Linares, Abhishek Cauligi
Future spacecraft and surface robotic missions require increasingly capable autonomy stacks for exploring challenging and unstructured domains, and trajectory optimization will be a cornerstone of such autonomy stacks. However, the nonlinear optimization solvers required remain too slow for use on relatively resource-constrained flight-grade computers. In this work, we turn towards amortized optimization, a learning-based technique for accelerating optimization run times, and present TOAST: Trajectory Optimization with Merit Function Warm Starts. Offline, using data collected from a simulation, we train a neural network to learn a mapping to the full primal and dual solutions given the problem parameters. Crucially, we build upon recent results from decision-focused learning and present a set of decision-focused loss functions using the notion of merit functions for optimization problems. We show that training networks with such constraint-informed losses can better encode the structure of the trajectory optimization problem and jointly learn to reconstruct the primal-dual solution while yielding improved constraint satisfaction. Through numerical experiments on a Lunar rover problem and a 3-degrees-of-freedom Mars powered descent guidance problem, we demonstrate that TOAST outperforms benchmark approaches in terms of both computation times and network prediction constraint satisfaction.
Read more9/18/2024
0
Constraint-Aware Diffusion Models for Trajectory Optimization
Anjian Li, Zihan Ding, Adji Bousso Dieng, Ryne Beeson
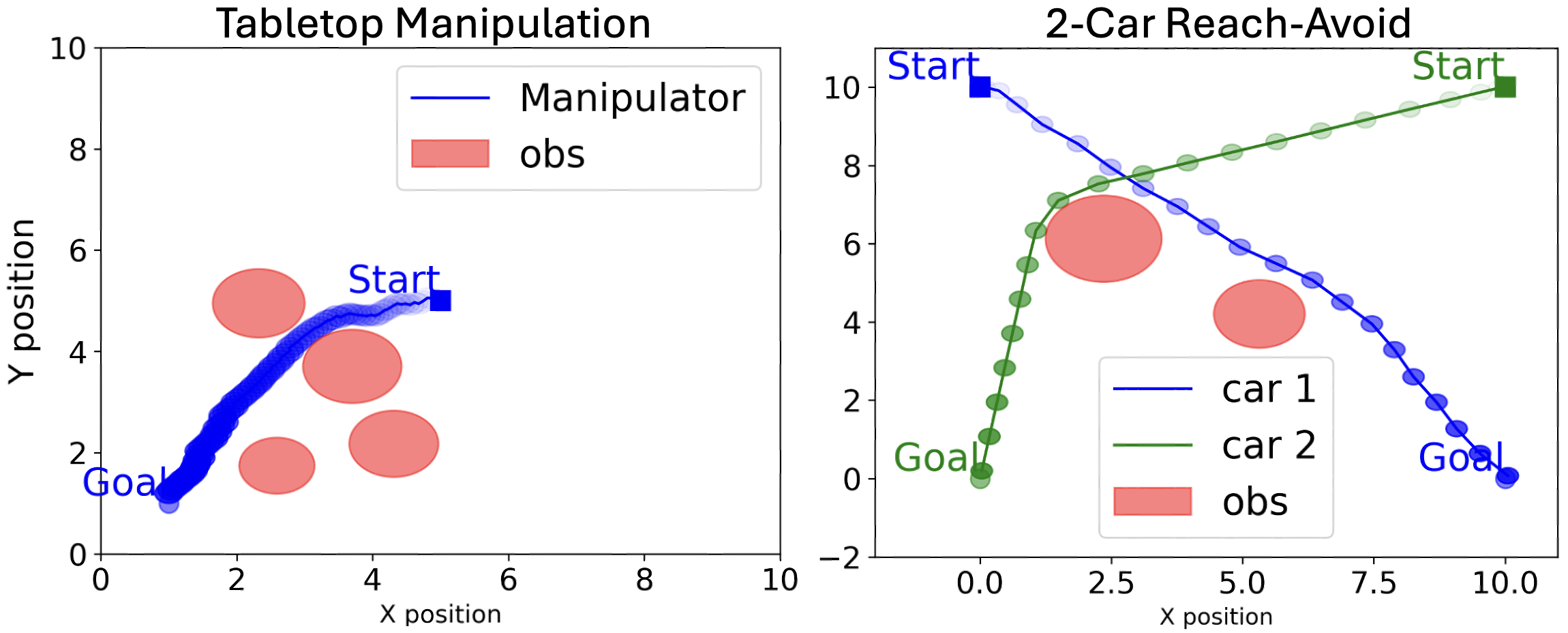
The diffusion model has shown success in generating high-quality and diverse solutions to trajectory optimization problems. However, diffusion models with neural networks inevitably make prediction errors, which leads to constraint violations such as unmet goals or collisions. This paper presents a novel constraint-aware diffusion model for trajectory optimization. We introduce a novel hybrid loss function for training that minimizes the constraint violation of diffusion samples compared to the groundtruth while recovering the original data distribution. Our model is demonstrated on tabletop manipulation and two-car reach-avoid problems, outperforming traditional diffusion models in minimizing constraint violations while generating samples close to locally optimal solutions.
Read more6/4/2024

0
Provably Feasible and Stable White-Box Trajectory Optimization
Zherong Pan, Yifan Zhu
We study the problem of Trajectory Optimization (TO) for a general class of stiff and constrained dynamic systems. We establish a set of mild assumptions, under which we show that TO converges numerically stably to a locally optimal and feasible solution up to arbitrary user-specified error tolerance. Our key observation is that all prior works use SQP as a black-box solver, where a TO problem is formulated as a Nonlinear Program (NLP) and the underlying SQP solver is not allowed to modify the NLP. Instead, we propose a white-box TO solver, where the SQP solver is informed with characteristics of the objective function and the dynamic system. It then uses these characteristics to derive approximate dynamic systems and customize the discretization schemes.
Read more6/26/2024
🛠️
0
Towards reliable real-time trajectory optimization
Fatemeh Rastgar
Motion planning is a key aspect of robotics. A common approach to address motion planning problems is trajectory optimization. Trajectory optimization can represent the high-level behaviors of robots through mathematical formulations. However, current trajectory optimization approaches have two main challenges. Firstly, their solution heavily depends on the initial guess, and they are prone to get stuck in local minima. Secondly, they face scalability limitations by increasing the number of constraints. This thesis endeavors to tackle these challenges by introducing four innovative trajectory optimization algorithms to improve reliability, scalability, and computational efficiency. There are two novel aspects of the proposed algorithms. The first key innovation is remodeling the kinematic constraints and collision avoidance constraints. Another key innovation lies in the design of algorithms that effectively utilize parallel computation on GPU accelerators. By using reformulated constraints and leveraging the computational power of GPUs, the proposed algorithms of this thesis demonstrate significant improvements in efficiency and scalability compared to the existing methods. Parallelization enables faster computation times, allowing for real-time decision-making in dynamic environments. Moreover, the algorithms are designed to adapt to changes in the environment, ensuring robust performance. Extensive benchmarking for each proposed optimizer validates their efficacy. Overall, this thesis makes a significant contribution to the field of trajectory optimization algorithms. It introduces innovative solutions that specifically address the challenges faced by existing methods. The proposed algorithms pave the way for more efficient and robust motion planning solutions in robotics by leveraging parallel computation and specific mathematical structures.
Read more8/21/2024