Continuous Dynamic Bipedal Jumping via Adaptive-model Optimization
2404.11807
0
0
Abstract
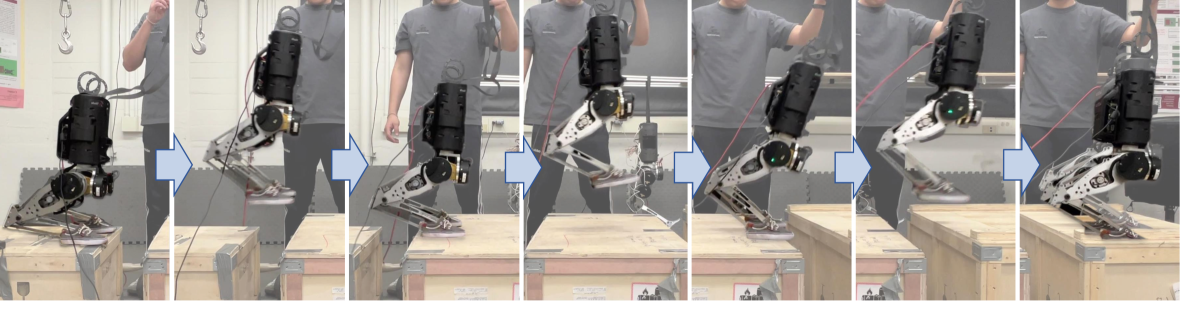
Dynamic and continuous jumping remains an open yet challenging problem in bipedal robot control. The choice of dynamic models in trajectory optimization (TO) problems plays a huge role in trajectory accuracy and computation efficiency, which normally cannot be ensured simultaneously. In this letter, we propose a novel adaptive-model optimization approach, a unified framework of Adaptive-model TO and Adaptive-frequency Model Predictive Control (MPC), to effectively realize continuous and robust jumping on HECTOR bipedal robot. The proposed Adaptive-model TO fuses adaptive-fidelity dynamics modeling of bipedal jumping motion for model fidelity necessities in different jumping phases to ensure trajectory accuracy and computation efficiency. In addition, conventional approaches have unsynchronized sampling frequencies in TO and real-time control, causing the framework to have mismatched modeling resolutions. We adapt MPC sampling frequency based on TO trajectory resolution in different phases for effective trajectory tracking. In hardware experiments, we have demonstrated robust and dynamic jumps covering a distance of up to 40 cm (57% of robot height). To verify the repeatability of this experiment, we run 53 jumping experiments and achieve 90% success rate. In continuous jumps, we demonstrate continuous bipedal jumping with terrain height perturbations (up to 5 cm) and discontinuities (up to 20 cm gap).
Create account to get full access
Overview
- This paper presents a novel approach for continuous dynamic bipedal jumping using an adaptive-model optimization technique.
- The proposed system aims to enable agile and versatile bipedal locomotion, including the ability to perform dynamic jumping maneuvers.
- The system leverages an adaptive model that can adjust its parameters in real-time to account for changes in the robot's dynamics and environment.
- Optimization-based control is used to generate jumping trajectories that maximize performance while respecting the system's constraints.
Plain English Explanation
The researchers have developed a new way for two-legged robots (bipedal robots) to jump continuously and dynamically. Their approach uses an "adaptive model" - a computer model of the robot that can adjust its parameters in real-time to account for changes in the robot's movements and the environment around it.
This adaptive model is then used in an optimization process to plan the robot's jumping motions. The optimization tries to find the best jumping trajectory that allows the robot to jump as high and as far as possible, while still staying within the physical limits of the robot's design.
By using this adaptive model and optimization-based control, the researchers were able to create a bipedal robot that can perform very agile and versatile jumping maneuvers, adjusting its behavior on the fly to handle different situations. This could be useful for applications like link to "agile-versatile-bipedal-robot-tracking-control-through" where robots need to navigate rapidly changing environments.
Technical Explanation
The core of the proposed approach is an link to "adaptive-force-based-control-dynamic-legged-locomotion" adaptive model that can update its parameters in real-time to account for changes in the bipedal robot's dynamics and the environment. This allows the model to accurately capture the complex, nonlinear behavior of the system.
An optimization-based controller then leverages this adaptive model to generate jumping trajectories that maximize performance objectives like jump height and jump distance, while satisfying constraints like joint torque limits. The optimization problem is formulated as a nonlinear program and solved using a sequential quadratic programming (SQP) method.
Key features of the approach include:
- Adaptive Model: An adaptive model that can update its parameters online to track changes in the robot and environment
- Optimization-based Control: An optimization framework that generates jumping motions by maximizing performance while respecting system constraints
- Continuous Jumping: The ability to perform continuous dynamic jumping maneuvers, going beyond simple static jumps
Experiments were conducted on a simulated bipedal robot model to evaluate the performance of the proposed approach. The results demonstrate the system's ability to execute sustained, dynamic jumping behaviors that adapt to changes in the robot's state and environment.
Critical Analysis
The paper presents a compelling approach for enabling continuous dynamic jumping in bipedal robots. The use of an adaptive model and optimization-based control is a promising direction for achieving agile and versatile legged locomotion, as demonstrated in related works like link to "agile-versatile-bipedal-robot-tracking-control-through" and link to "bipedal-safe-navigation-over-uncertain-rough-terrain".
However, the paper does not provide a detailed analysis of the adaptive model's limitations or the optimization algorithm's sensitivity to initial conditions and constraints. Additionally, the experiments are conducted solely in simulation, and it is unclear how well the approach would translate to a physical robot platform with all its real-world complexities.
Further research is needed to address these potential issues and validate the approach on hardware. Specifically, it would be valuable to explore the link to "adaptive-gait-modeling-optimization-principally-kinematic-systems" and link to "autonomous-locomotion-mode-transition-quadruped-track-legged" to understand how the adaptive model and optimization techniques could be extended to handle a broader range of locomotion behaviors and transitions.
Conclusion
This paper presents a novel approach for enabling continuous dynamic bipedal jumping using an adaptive-model optimization technique. By combining an adaptive model that can track changes in the robot's dynamics with an optimization-based control framework, the researchers were able to generate jumping motions that adapt to the robot's state and environment.
The proposed system represents an important step towards more agile and versatile legged locomotion, with potential applications in areas like link to "agile-versatile-bipedal-robot-tracking-control-through" and link to "bipedal-safe-navigation-over-uncertain-rough-terrain". Further research is needed to address the limitations identified in the critical analysis and validate the approach on physical robot platforms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

New!A Fast Online Omnidirectional Quadrupedal Jumping Framework Via Virtual-Model Control and Minimum Jerk Trajectory Generation
Linzhu Yue, Lingwei Zhang, Zhitao Song, Hongbo Zhang, Jinhu Dong, Xuanqi Zeng, Yun-Hui Liu
0
0
Exploring the limits of quadruped robot agility, particularly in the context of rapid and real-time planning and execution of omnidirectional jump trajectories, presents significant challenges due to the complex dynamics involved, especially when considering significant impulse contacts. This paper introduces a new framework to enable fast, omnidirectional jumping capabilities for quadruped robots. Utilizing minimum jerk technology, the proposed framework efficiently generates jump trajectories that exploit its analytical solutions, ensuring numerical stability and dynamic compatibility with minimal computational resources. The virtual model control is employed to formulate a Quadratic Programming (QP) optimization problem to accurately track the Center of Mass (CoM) trajectories during the jump phase. The whole-body control strategies facilitate precise and compliant landing motion. Moreover, the different jumping phase is triggered by time-schedule. The framework's efficacy is demonstrated through its implementation on an enhanced version of the open-source Mini Cheetah robot. Omnidirectional jumps-including forward, backward, and other directional-were successfully executed, showcasing the robot's capability to perform rapid and consecutive jumps with an average trajectory generation and tracking solution time of merely 50 microseconds.
7/2/2024

CDM-MPC: An Integrated Dynamic Planning and Control Framework for Bipedal Robots Jumping
Zhicheng He, Jiayang Wu, Jingwen Zhang, Shibowen Zhang, Yapeng Shi, Hangxin Liu, Lining Sun, Yao Su, Xiaokun Leng
0
0
Performing acrobatic maneuvers like dynamic jumping in bipedal robots presents significant challenges in terms of actuation, motion planning, and control. Traditional approaches to these tasks often simplify dynamics to enhance computational efficiency, potentially overlooking critical factors such as the control of centroidal angular momentum (CAM) and the variability of centroidal composite rigid body inertia (CCRBI). This paper introduces a novel integrated dynamic planning and control framework, termed centroidal dynamics model-based model predictive control (CDM-MPC), designed for robust jumping control that fully considers centroidal momentum and non-constant CCRBI. The framework comprises an optimization-based kinodynamic motion planner and an MPC controller for real-time trajectory tracking and replanning. Additionally, a centroidal momentum-based inverse kinematics (IK) solver and a landing heuristic controller are developed to ensure stability during high-impact landings. The efficacy of the CDM-MPC framework is validated through extensive testing on the full-sized humanoid robot KUAVO in both simulations and experiments.
5/21/2024

Adaptive Gait Modeling and Optimization for Principally Kinematic Systems
Siming Deng, Noah J. Cowan, Brian A. Bittner
0
0
Robotic adaptation to unanticipated operating conditions is crucial to achieving persistence and robustness in complex real world settings. For a wide range of cutting-edge robotic systems, such as micro- and nano-scale robots, soft robots, medical robots, and bio-hybrid robots, it is infeasible to anticipate the operating environment a priori due to complexities that arise from numerous factors including imprecision in manufacturing, chemo-mechanical forces, and poorly understood contact mechanics. Drawing inspiration from data-driven modeling, geometric mechanics (or gauge theory), and adaptive control, we employ an adaptive system identification framework and demonstrate its efficacy in enhancing the performance of principally kinematic locomotors (those governed by Rayleigh dissipation or zero momentum conservation). We showcase the capability of the adaptive model to efficiently accommodate varying terrains and iteratively modified behaviors within a behavior optimization framework. This provides both the ability to improve fundamental behaviors and perform motion tracking to precision. Notably, we are capable of optimizing the gaits of the Purcell swimmer using approximately 10 cycles per link, which for the nine-link Purcell swimmer provides a factor of ten improvement in optimization speed over the state of the art. Beyond simply a computational speed up, this ten-fold improvement may enable this method to be successfully deployed for in-situ behavior refinement, injury recovery, and terrain adaptation, particularly in domains where simulations provide poor guides for the real world.
4/19/2024

Learning Generic and Dynamic Locomotion of Humanoids Across Discrete Terrains
Shangqun Yu, Nisal Perera, Daniel Marew, Donghyun Kim
0
0
This paper addresses the challenge of terrain-adaptive dynamic locomotion in humanoid robots, a problem traditionally tackled by optimization-based methods or reinforcement learning (RL). Optimization-based methods, such as model-predictive control, excel in finding optimal reaction forces and achieving agile locomotion, especially in quadruped, but struggle with the nonlinear hybrid dynamics of legged systems and the real-time computation of step location, timing, and reaction forces. Conversely, RL-based methods show promise in navigating dynamic and rough terrains but are limited by their extensive data requirements. We introduce a novel locomotion architecture that integrates a neural network policy, trained through RL in simplified environments, with a state-of-the-art motion controller combining model-predictive control (MPC) and whole-body impulse control (WBIC). The policy efficiently learns high-level locomotion strategies, such as gait selection and step positioning, without the need for full dynamics simulations. This control architecture enables humanoid robots to dynamically navigate discrete terrains, making strategic locomotion decisions (e.g., walking, jumping, and leaping) based on ground height maps. Our results demonstrate that this integrated control architecture achieves dynamic locomotion with significantly fewer training samples than conventional RL-based methods and can be transferred to different humanoid platforms without additional training. The control architecture has been extensively tested in dynamic simulations, accomplishing terrain height-based dynamic locomotion for three different robots.
5/28/2024