Bipedal Safe Navigation over Uncertain Rough Terrain: Unifying Terrain Mapping and Locomotion Stability
2403.16356
0
0

Abstract
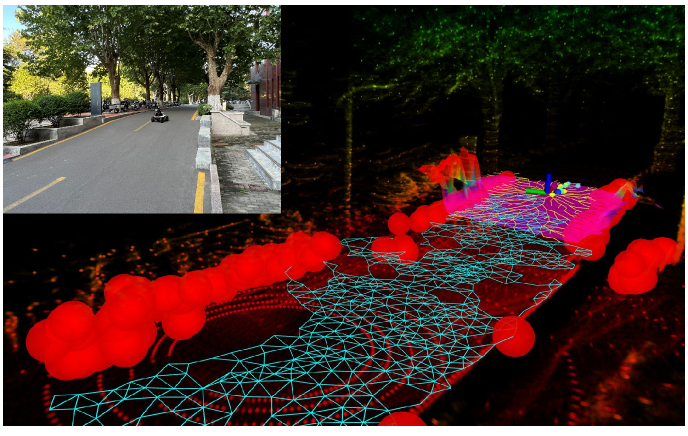
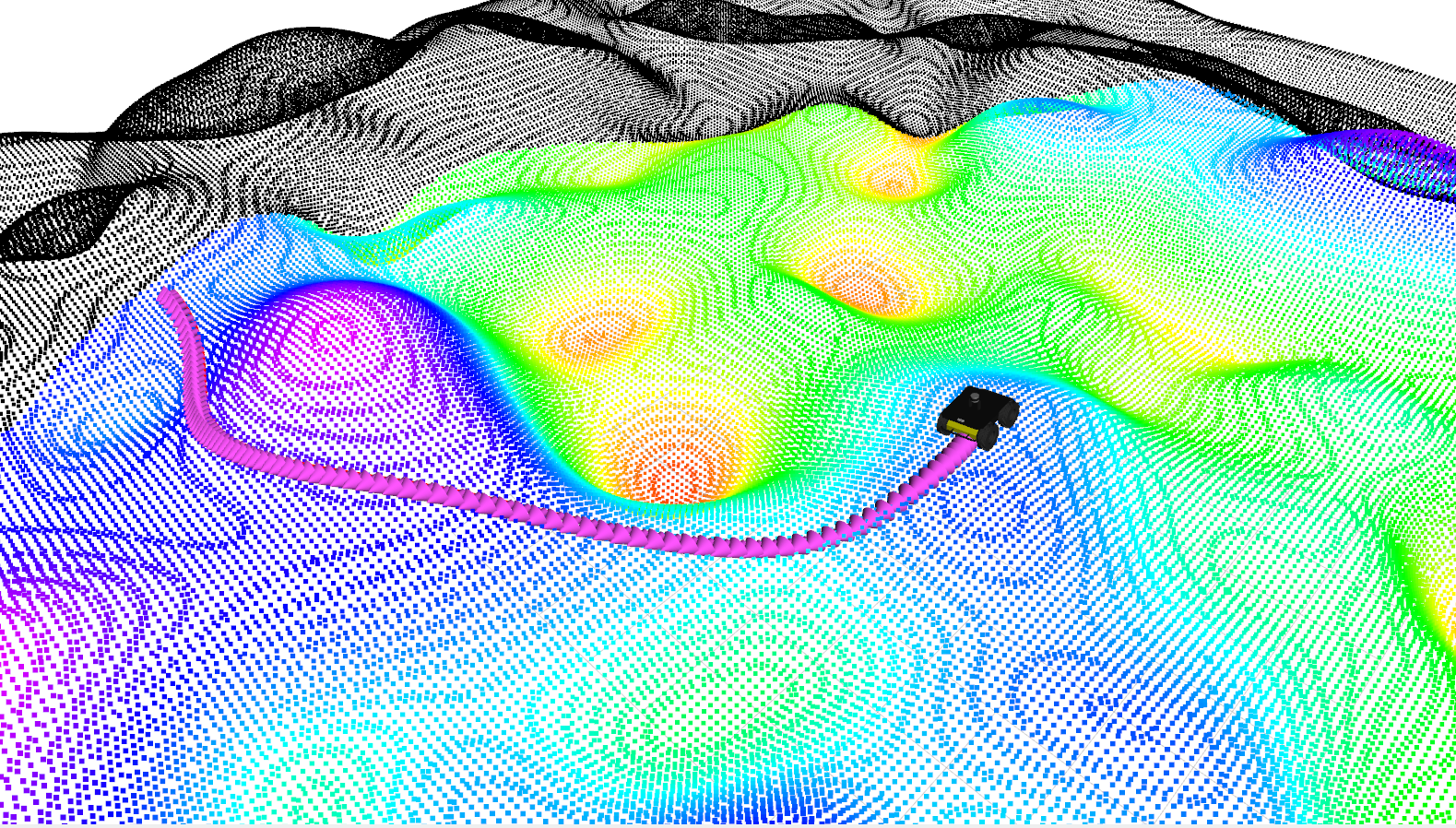
We study the problem of bipedal robot navigation in complex environments with uncertain and rough terrain. In particular, we consider a scenario in which the robot is expected to reach a desired goal location by traversing an environment with uncertain terrain elevation. Such terrain uncertainties induce not only untraversable regions but also robot motion perturbations. Thus, the problems of terrain mapping and locomotion stability are intertwined. We evaluate three different kernels for Gaussian process (GP) regression to learn the terrain elevation. We also learn the motion deviation resulting from both the terrain as well as the discrepancy between the reduced-order Prismatic Inverted Pendulum Model used for planning and the full-order locomotion dynamics. We propose a hierarchical locomotion-dynamics-aware sampling-based navigation planner. The global navigation planner plans a series of local waypoints to reach the desired goal locations while respecting locomotion stability constraints. Then, a local navigation planner is used to generate a sequence of dynamically feasible footsteps to reach local waypoints. We develop a novel trajectory evaluation metric to minimize motion deviation and maximize information gain of the terrain elevation map. We evaluate the efficacy of our planning framework on Digit bipedal robot simulation in MuJoCo.
Create account to get full access
Overview
- This paper proposes a unified framework for bipedal robot navigation over uncertain rough terrain, combining terrain mapping and locomotion stability.
- It introduces a hierarchical sampling-based navigation approach that can handle uncertainty in the terrain and ensure stable locomotion.
- The framework leverages Gaussian process learning to model terrain uncertainty and a path evaluation module to assess locomotion stability.
- Experiments on simulated and real-world environments demonstrate the effectiveness of the proposed approach in navigating safely over uneven terrain.
Plain English Explanation
The paper presents a new way for bipedal robots to navigate safely over rough and uneven terrain. Traditionally, robots have struggled with this task because they need to both map the terrain accurately and ensure their movements are stable and balanced.
This paper proposes a unified framework that addresses both of these challenges. It uses a hierarchical, sampling-based approach to plan the robot's path, which allows it to handle uncertainty in the terrain information.
The framework also includes a specialized module to evaluate the stability of the robot's movements as it navigates the path. This is important because the robot needs to be able to maintain its balance and avoid falling, even on uneven or unpredictable surfaces.
The authors leverage Gaussian processes, a powerful machine learning technique, to model the uncertainty in the terrain data. This allows the robot to reason about the potential risks and plan accordingly.
Through experiments in simulated and real-world environments, the researchers demonstrate that their approach enables bipedal robots to navigate safely and reliably over rough terrain. This could have important applications in areas like search and rescue, exploration, or disaster response, where robots need to be able to traverse challenging outdoor environments.
Technical Explanation
The paper proposes a unified framework for safe navigation of bipedal robots over uncertain rough terrain. It combines terrain mapping and locomotion stability assessment in a hierarchical sampling-based planning approach.
The framework uses Gaussian process learning to model the uncertainty in the terrain, which is then incorporated into the path planning process. A path evaluation module assesses the stability of the robot's locomotion along candidate paths, ensuring that the planned motion is feasible and safe.
The hierarchical planning approach first generates a set of candidate paths using a sampling-based technique. These paths are then evaluated for locomotion stability using a model-based analysis that considers factors like joint torques, foot clearance, and stability margins.
The most stable and feasible path is then selected and refined through additional optimization. Experimental results on simulated and real-world environments demonstrate the effectiveness of the proposed approach in navigating safely over uneven and uncertain terrain.
Critical Analysis
The paper presents a comprehensive framework for addressing the challenges of bipedal robot navigation over rough terrain, which is an important and active area of research in robotics.
One potential limitation is that the framework relies on accurate terrain mapping, which may not always be available, especially in dynamic or partially observed environments. The authors acknowledge this and suggest that integrating online terrain sensing and mapping could further improve the system's robustness.
Additionally, the computational complexity of the hierarchical planning approach may pose challenges for real-time implementation, particularly on resource-constrained robotic platforms. Investigating ways to optimize the planning algorithms or leverage parallel computing could help address this issue.
Overall, the paper makes a valuable contribution to the field of bipedal robot navigation and provides a solid foundation for further research and development in this area.
Conclusion
This paper presents a unified framework for safe navigation of bipedal robots over uncertain rough terrain. By combining terrain mapping and locomotion stability assessment in a hierarchical sampling-based planning approach, the proposed system can handle the challenges of navigating uneven and unpredictable environments.
The use of Gaussian process learning to model terrain uncertainty and a path evaluation module to assess locomotion stability are key innovations that enable the robots to plan and execute safe, stable movements. The experimental results demonstrate the effectiveness of the approach in simulated and real-world scenarios, suggesting potential applications in areas such as search and rescue, exploration, and disaster response.
While the framework has some limitations, it represents an important step forward in the development of robust and capable bipedal robot navigation systems. Further research to address the remaining challenges could lead to even more advanced and versatile robots capable of traversing a wide range of complex outdoor environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
History-Aware Planning for Risk-free Autonomous Navigation on Unknown Uneven Terrain
Yinchuan Wang, Nianfei Du, Yongsen Qin, Xiang Zhang, Rui Song, Chaoqun Wang
0
0
It is challenging for the mobile robot to achieve autonomous and mapless navigation in the unknown environment with uneven terrain. In this study, we present a layered and systematic pipeline. At the local level, we maintain a tree structure that is dynamically extended with the navigation. This structure unifies the planning with the terrain identification. Besides, it contributes to explicitly identifying the hazardous areas on uneven terrain. In particular, certain nodes of the tree are consistently kept to form a sparse graph at the global level, which records the history of the exploration. A series of subgoals that can be obtained in the tree and the graph are utilized for leading the navigation. To determine a subgoal, we develop an evaluation method whose input elements can be efficiently obtained on the layered structure. We conduct both simulation and real-world experiments to evaluate the developed method and its key modules. The experimental results demonstrate the effectiveness and efficiency of our method. The robot can travel through the unknown uneven region safely and reach the target rapidly without a preconstructed map.
6/5/2024
Bi-level Trajectory Optimization on Uneven Terrains with Differentiable Wheel-Terrain Interaction Model
Amith Manoharan, Aditya Sharma, Himani Belsare, Kaustab Pal, K. Madhava Krishna, Arun Kumar Singh
0
0
Navigation of wheeled vehicles on uneven terrain necessitates going beyond the 2D approaches for trajectory planning. Specifically, it is essential to incorporate the full 6dof variation of vehicle pose and its associated stability cost in the planning process. To this end, most recent works aim to learn a neural network model to predict the vehicle evolution. However, such approaches are data-intensive and fraught with generalization issues. In this paper, we present a purely model-based approach that just requires the digital elevation information of the terrain. Specifically, we express the wheel-terrain interaction and 6dof pose prediction as a non-linear least squares (NLS) problem. As a result, trajectory planning can be viewed as a bi-level optimization. The inner optimization layer predicts the pose on the terrain along a given trajectory, while the outer layer deforms the trajectory itself to reduce the stability and kinematic costs of the pose. We improve the state-of-the-art in the following respects. First, we show that our NLS based pose prediction closely matches the output from a high-fidelity physics engine. This result coupled with the fact that we can query gradients of the NLS solver, makes our pose predictor, a differentiable wheel-terrain interaction model. We further leverage this differentiability to efficiently solve the proposed bi-level trajectory optimization problem. Finally, we perform extensive experiments, and comparison with a baseline to showcase the effectiveness of our approach in obtaining smooth, stable trajectories.
4/12/2024
🌐
TOP-Nav: Legged Navigation Integrating Terrain, Obstacle and Proprioception Estimation
Junli Ren, Yikai Liu, Yingru Dai, Guijin Wang
0
0
Legged navigation is typically examined within open-world, off-road, and challenging environments. In these scenarios, estimating external disturbances requires a complex synthesis of multi-modal information. This underlines a major limitation in existing works that primarily focus on avoiding obstacles. In this work, we propose TOP-Nav, a novel legged navigation framework that integrates a comprehensive path planner with Terrain awareness, Obstacle avoidance and close-loop Proprioception. TOP-Nav underscores the synergies between vision and proprioception in both path and motion planning. Within the path planner, we present and integrate a terrain estimator that enables the robot to select waypoints on terrains with higher traversability while effectively avoiding obstacles. In the motion planning level, we not only implement a locomotion controller to track the navigation commands, but also construct a proprioception advisor to provide motion evaluations for the path planner. Based on the close-loop motion feedback, we make online corrections for the vision-based terrain and obstacle estimations. Consequently, TOP-Nav achieves open-world navigation that the robot can handle terrains or disturbances beyond the distribution of prior knowledge and overcomes constraints imposed by visual conditions. Building upon extensive experiments conducted in both simulation and real-world environments, TOP-Nav demonstrates superior performance in open-world navigation compared to existing methods.
4/24/2024

Learning Generic and Dynamic Locomotion of Humanoids Across Discrete Terrains
Shangqun Yu, Nisal Perera, Daniel Marew, Donghyun Kim
0
0
This paper addresses the challenge of terrain-adaptive dynamic locomotion in humanoid robots, a problem traditionally tackled by optimization-based methods or reinforcement learning (RL). Optimization-based methods, such as model-predictive control, excel in finding optimal reaction forces and achieving agile locomotion, especially in quadruped, but struggle with the nonlinear hybrid dynamics of legged systems and the real-time computation of step location, timing, and reaction forces. Conversely, RL-based methods show promise in navigating dynamic and rough terrains but are limited by their extensive data requirements. We introduce a novel locomotion architecture that integrates a neural network policy, trained through RL in simplified environments, with a state-of-the-art motion controller combining model-predictive control (MPC) and whole-body impulse control (WBIC). The policy efficiently learns high-level locomotion strategies, such as gait selection and step positioning, without the need for full dynamics simulations. This control architecture enables humanoid robots to dynamically navigate discrete terrains, making strategic locomotion decisions (e.g., walking, jumping, and leaping) based on ground height maps. Our results demonstrate that this integrated control architecture achieves dynamic locomotion with significantly fewer training samples than conventional RL-based methods and can be transferred to different humanoid platforms without additional training. The control architecture has been extensively tested in dynamic simulations, accomplishing terrain height-based dynamic locomotion for three different robots.
5/28/2024