Creating a Digital Twin of Spinal Surgery: A Proof of Concept

0

Sign in to get full access
Overview
- This paper presents a proof-of-concept for creating a digital twin of spinal surgery, which could help improve surgical planning and outcomes.
- The researchers developed a simulation-based approach to generate a patient-specific digital model of the spine, including bone and soft tissue structures, that can be used to virtually plan and rehearse surgical procedures.
- The digital twin is created by integrating medical imaging data, biomechanical models, and computational simulations to capture the complex anatomy and behavior of the spine.
Plain English Explanation
The researchers in this paper wanted to create a digital version or "twin" of a person's spine that could be used to plan and practice spinal surgery before the real operation. Enabling Additive Manufacturing Part Inspection Using Digital Twins and Efficient Data-Driven Scene Simulation Using Robotic have also explored the use of digital twins for manufacturing and robotics.
To make the digital twin, the team used medical scans of the patient's spine to build a 3D computer model. They then added information about how the bones, muscles, and other tissues in the spine normally move and interact. This allowed them to simulate what would happen during different surgical procedures on the virtual spine before doing the real surgery on the patient.
Having this digital twin could help surgeons better understand the individual patient's anatomy and plan the best approach for their surgery. It might also let them practice the procedure ahead of time to identify and resolve any potential issues. Overall, this proof-of-concept shows how digital twins could improve the safety and effectiveness of spinal surgery.
Technical Explanation
The researchers developed a framework for creating a patient-specific digital twin of the spine that integrates medical imaging data, biomechanical models, and computational simulations. Digital Twin Generators for Disease Modeling and XCAT 2.0: A Comprehensive Library of Personalized Digital Twins have also explored the use of digital twins for medical applications.
The process begins by segmenting CT and MRI scans of the patient's spine to extract 3D models of the bony and soft tissue structures. These anatomical models are then combined with biomechanical models that describe how the different components of the spine move and interact under various loads and constraints.
Computational simulations are then used to predict the behavior of the digital twin spine model under different surgical scenarios. This allows surgeons to virtually plan and rehearse procedures, simulate potential outcomes, and identify any potential issues or complications before the actual surgery.
The researchers validated their digital twin approach using cadaver studies, demonstrating that the simulated results aligned well with physical measurements. They also showed how the digital twin could be used to optimize the placement of surgical implants like pedicle screws.
Critical Analysis
The researchers acknowledge that this proof-of-concept study has several limitations. The digital twin model does not yet fully capture the complex, patient-specific biomechanics of the spine, as some parameters were estimated from generic data sources. Computer Vision for Increased Operative Efficiency via Identification has also noted the challenges of developing accurate digital twins.
Additionally, the validation was limited to a small number of cadaver specimens, and more extensive testing would be needed to demonstrate the clinical utility and reliability of the digital twin approach. Integrating real-time imaging and sensing data during the actual surgery could further improve the fidelity of the digital twin and its ability to guide surgical decision-making.
Overall, this paper presents a promising proof-of-concept for using digital twins to enhance spinal surgery, but significant additional research and development will be required before such an approach could be widely adopted in clinical practice.
Conclusion
This paper demonstrates a proof-of-concept for creating a patient-specific digital twin of the spine that can be used to virtually plan and rehearse spinal surgery. By integrating medical imaging data, biomechanical models, and computational simulations, the researchers were able to generate a digital representation of the spine that closely matched physical measurements.
While this is an important first step, further research and validation will be needed to refine the digital twin approach and demonstrate its clinical utility. Incorporating real-time data and expanding the validation to larger patient cohorts could help increase the fidelity and reliability of the digital twin for guiding surgical decision-making.
Overall, the development of digital twins for spinal surgery has the potential to improve surgical planning, reduce complications, and ultimately enhance patient outcomes. This proof-of-concept lays the foundation for future work in this exciting area of medical technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Creating a Digital Twin of Spinal Surgery: A Proof of Concept
Jonas Hein, Fr'ed'eric Giraud, Lilian Calvet, Alexander Schwarz, Nicola Alessandro Cavalcanti, Sergey Prokudin, Mazda Farshad, Siyu Tang, Marc Pollefeys, Fabio Carrillo, Philipp Furnstahl
Surgery digitalization is the process of creating a virtual replica of real-world surgery, also referred to as a surgical digital twin (SDT). It has significant applications in various fields such as education and training, surgical planning, and automation of surgical tasks. In addition, SDTs are an ideal foundation for machine learning methods, enabling the automatic generation of training data. In this paper, we present a proof of concept (PoC) for surgery digitalization that is applied to an ex-vivo spinal surgery. The proposed digitalization focuses on the acquisition and modelling of the geometry and appearance of the entire surgical scene. We employ five RGB-D cameras for dynamic 3D reconstruction of the surgeon, a high-end camera for 3D reconstruction of the anatomy, an infrared stereo camera for surgical instrument tracking, and a laser scanner for 3D reconstruction of the operating room and data fusion. We justify the proposed methodology, discuss the challenges faced and further extensions of our prototype. While our PoC partially relies on manual data curation, its high quality and great potential motivate the development of automated methods for the creation of SDTs.
Read more5/24/2024
⛏️
0
New!Virtual Reality for Immersive Education in Orthopedic Surgery Digital Twins
Jonas Hein, Jan Grunder, Lilian Calvet, Fr'ed'eric Giraud, Nicola Alessandro Cavalcanti, Fabio Carrillo, Philipp Furnstahl
Virtual Reality technology, when integrated with Surgical Digital Twins (SDTs), offers significant potential in medical training and surgical planning. We present SurgTwinVR, a VR application that immerses users within an SDT and enables them to navigate a high-fidelity virtual replica of the surgical environment. SurgTwinVR is the first VR application to utilize a dynamic 3D environment that is a clone of a real surgery, encompassing the entire surgical scene, including the surgeon, anatomy, and instruments. Our system utilizes a SDT with important improvements for real-time rendering and features to showcase the potential benefits of such an application in surgical education.
Read more9/18/2024

0
Med-Real2Sim: Non-Invasive Medical Digital Twins using Physics-Informed Self-Supervised Learning
Keying Kuang, Frances Dean, Jack B. Jedlicki, David Ouyang, Anthony Philippakis, David Sontag, Ahmed M. Alaa
A digital twin is a virtual replica of a real-world physical phenomena that uses mathematical modeling to characterize and simulate its defining features. By constructing digital twins for disease processes, we can perform in-silico simulations that mimic patients' health conditions and counterfactual outcomes under hypothetical interventions in a virtual setting. This eliminates the need for invasive procedures or uncertain treatment decisions. In this paper, we propose a method to identify digital twin model parameters using only noninvasive patient health data. We approach the digital twin modeling as a composite inverse problem, and observe that its structure resembles pretraining and finetuning in self-supervised learning (SSL). Leveraging this, we introduce a physics-informed SSL algorithm that initially pretrains a neural network on the pretext task of learning a differentiable simulator of a physiological process. Subsequently, the model is trained to reconstruct physiological measurements from noninvasive modalities while being constrained by the physical equations learned in pretraining. We apply our method to identify digital twins of cardiac hemodynamics using noninvasive echocardiogram videos, and demonstrate its utility in unsupervised disease detection and in-silico clinical trials.
Read more5/29/2024
0
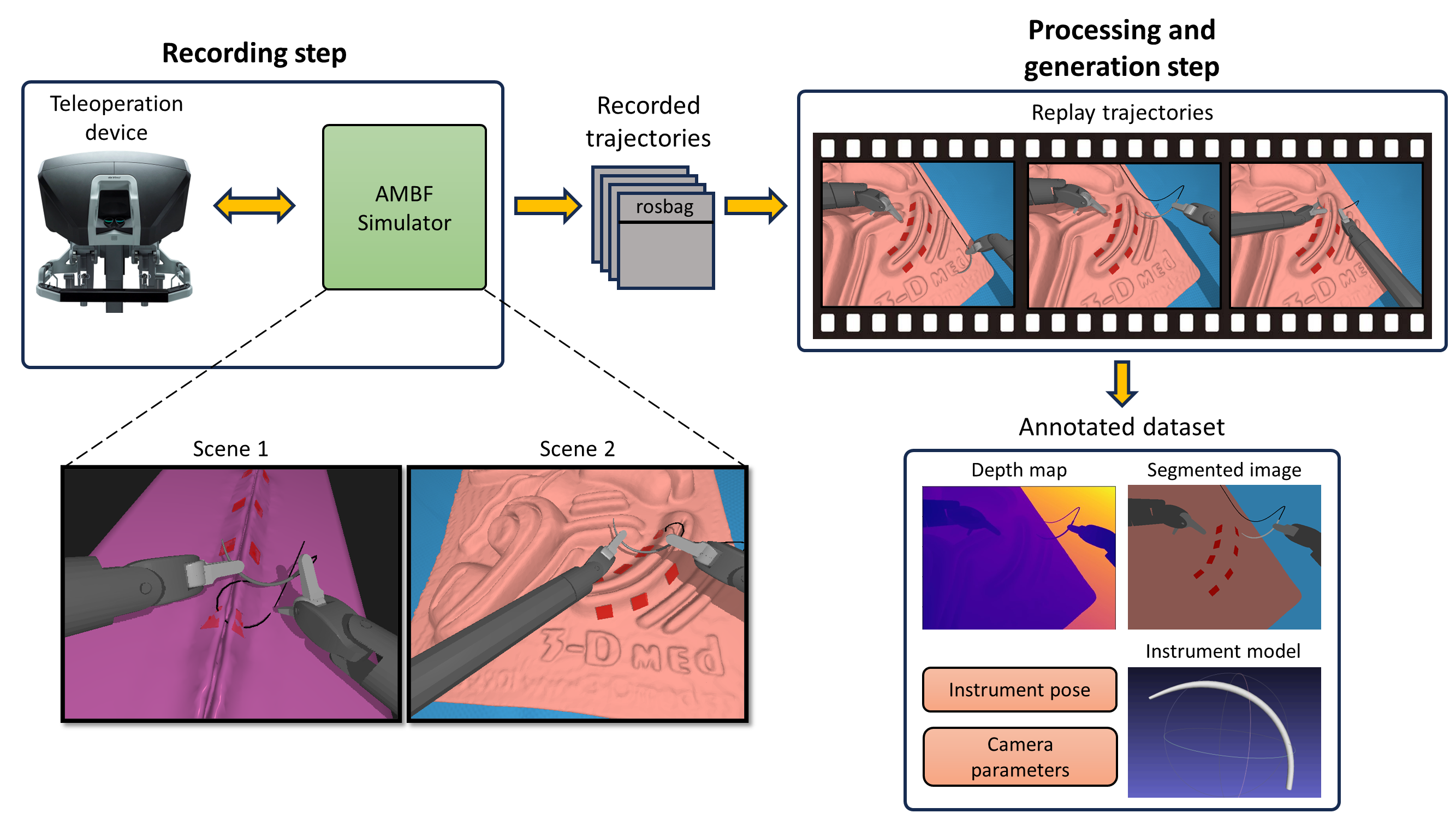
Realistic Data Generation for 6D Pose Estimation of Surgical Instruments
Juan Antonio Barragan, Jintan Zhang, Haoying Zhou, Adnan Munawar, Peter Kazanzides
Automation in surgical robotics has the potential to improve patient safety and surgical efficiency, but it is difficult to achieve due to the need for robust perception algorithms. In particular, 6D pose estimation of surgical instruments is critical to enable the automatic execution of surgical maneuvers based on visual feedback. In recent years, supervised deep learning algorithms have shown increasingly better performance at 6D pose estimation tasks; yet, their success depends on the availability of large amounts of annotated data. In household and industrial settings, synthetic data, generated with 3D computer graphics software, has been shown as an alternative to minimize annotation costs of 6D pose datasets. However, this strategy does not translate well to surgical domains as commercial graphics software have limited tools to generate images depicting realistic instrument-tissue interactions. To address these limitations, we propose an improved simulation environment for surgical robotics that enables the automatic generation of large and diverse datasets for 6D pose estimation of surgical instruments. Among the improvements, we developed an automated data generation pipeline and an improved surgical scene. To show the applicability of our system, we generated a dataset of 7.5k images with pose annotations of a surgical needle that was used to evaluate a state-of-the-art pose estimation network. The trained model obtained a mean translational error of 2.59mm on a challenging dataset that presented varying levels of occlusion. These results highlight our pipeline's success in training and evaluating novel vision algorithms for surgical robotics applications.
Read more6/12/2024