D2E-An Autonomous Decision-making Dataset involving Driver States and Human Evaluation
2406.01598
0
0
💬
Abstract
With the advancement of deep learning technology, data-driven methods are increasingly used in the decision-making of autonomous driving, and the quality of datasets greatly influenced the model performance. Although current datasets have made significant progress in the collection of vehicle and environment data, emphasis on human-end data including the driver states and human evaluation is not sufficient. In addition, existing datasets consist mostly of simple scenarios such as car following, resulting in low interaction levels. In this paper, we introduce the Driver to Evaluation dataset (D2E), an autonomous decision-making dataset that contains data on driver states, vehicle states, environmental situations, and evaluation scores from human reviewers, covering a comprehensive process of vehicle decision-making. Apart from regular agents and surrounding environment information, we not only collect driver factor data including first-person view videos, physiological signals, and eye attention data, but also provide subjective rating scores from 40 human volunteers. The dataset is mixed of driving simulator scenes and real-road ones. High-interaction situations are designed and filtered to ensure behavior diversity. Through data organization, analysis, and preprocessing, D2E contains over 1100 segments of interactive driving case data covering from human driver factor to evaluation results, supporting the development of data-driven decision-making related algorithms.
Create account to get full access
Overview
- The paper introduces the Driver to Evaluation (D2E) dataset, an autonomous decision-making dataset that includes data on driver states, vehicle states, environmental situations, and human evaluation scores.
- The dataset aims to provide a comprehensive set of data to support the development of data-driven decision-making algorithms for autonomous driving.
- The dataset includes both driving simulator scenes and real-road driving scenarios, with a focus on high-interaction situations to ensure behavior diversity.
Plain English Explanation
The paper discusses the development of a new dataset called the Driver to Evaluation (D2E) dataset, which is designed to help improve autonomous driving systems. Autonomous driving systems, which are the self-driving cars of the future, rely heavily on machine learning and data-driven approaches to make decisions on the road. However, the quality of the data used to train these systems is crucial, and current datasets may not be sufficient.
The D2E dataset aims to address this by providing a more comprehensive set of data on the driving process, including information about the driver's state (e.g., their physiology and attention), the vehicle's state, and the surrounding environment. Additionally, the dataset includes subjective ratings from human reviewers on the quality of the vehicle's decision-making. This information is important because it can help autonomous driving systems learn to make decisions that are not just technically correct, but also aligned with human preferences and expectations.
The dataset includes both simulated driving scenarios and real-world driving data, with a focus on high-interaction situations that can challenge the decision-making abilities of autonomous systems. By providing this diverse and rich set of data, the researchers hope to enable the development of more advanced, data-driven decision-making algorithms for autonomous driving.
Technical Explanation
The paper introduces the Driver to Evaluation (D2E) dataset, which is designed to support the development of data-driven decision-making algorithms for autonomous driving. The dataset includes a comprehensive set of data, including information on driver states, vehicle states, environmental situations, and subjective evaluation scores from human reviewers.
In addition to the standard vehicle and environment data, the D2E dataset includes first-person view videos, physiological signals, and eye attention data from the drivers. This driver-specific data is crucial for understanding the human factors that influence driving behavior and decision-making. The dataset also includes subjective rating scores from 40 human volunteers, who evaluated the decision-making of the autonomous system.
The dataset is a mix of driving simulator scenes and real-road driving scenarios, with a focus on high-interaction situations. These high-interaction scenarios are designed and filtered to ensure a diverse set of driving behaviors, which is important for training robust decision-making algorithms.
Through data organization, analysis, and preprocessing, the D2E dataset contains over 1100 segments of interactive driving case data, covering the entire process from human driver factors to final evaluation results. This comprehensive dataset is intended to support the development of advanced, data-driven decision-making algorithms for autonomous driving.
Critical Analysis
The D2E dataset represents a significant step forward in the field of autonomous driving datasets. By incorporating driver-specific data and subjective human evaluation, the dataset provides a more holistic view of the decision-making process in autonomous driving. This is an important advancement, as current datasets [1][2][3] have primarily focused on vehicle and environmental data, without sufficient emphasis on human factors.
However, the paper acknowledges that the dataset is limited to a relatively small number of driving scenarios, with a focus on high-interaction situations. While this diversity is important, it may not be representative of the full range of driving conditions that autonomous systems will encounter in the real world. Additionally, the subjective evaluation scores from human reviewers may be subject to individual biases and preferences, which could introduce potential sources of error or inconsistency.
Further research and validation will be necessary to fully understand the strengths and limitations of the D2E dataset [4]. Researchers may also want to explore ways to incorporate additional data sources, such as [5], to provide a more comprehensive view of the driving environment and decision-making process.
Conclusion
The Driver to Evaluation (D2E) dataset represents a significant contribution to the field of autonomous driving by providing a comprehensive dataset that includes driver-specific data, environmental information, and subjective human evaluation. This dataset has the potential to enable the development of more advanced, data-driven decision-making algorithms for autonomous vehicles, which could ultimately lead to safer and more reliable self-driving systems.
While the dataset has some limitations, the researchers' focus on incorporating human factors and high-interaction scenarios is a promising step forward. As autonomous driving technology continues to evolve, datasets like D2E will be crucial for driving progress and ensuring that these systems are aligned with human preferences and expectations.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
A Survey on Autonomous Driving Datasets: Statistics, Annotation Quality, and a Future Outlook
Mingyu Liu, Ekim Yurtsever, Jonathan Fossaert, Xingcheng Zhou, Walter Zimmer, Yuning Cui, Bare Luka Zagar, Alois C. Knoll
0
0
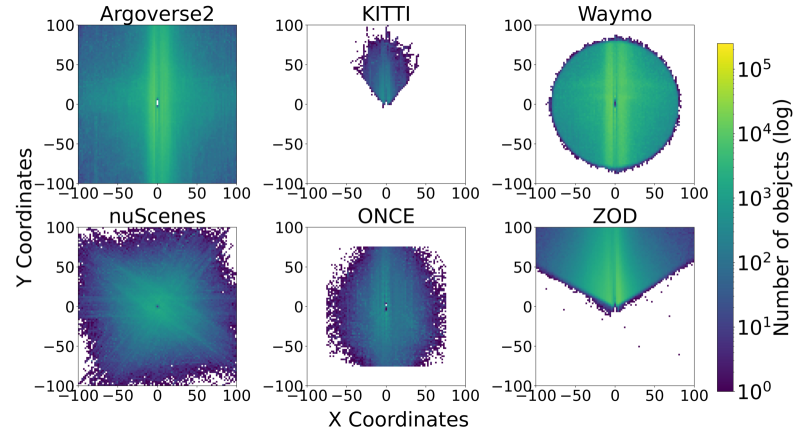
Autonomous driving has rapidly developed and shown promising performance due to recent advances in hardware and deep learning techniques. High-quality datasets are fundamental for developing reliable autonomous driving algorithms. Previous dataset surveys either focused on a limited number or lacked detailed investigation of dataset characteristics. To this end, we present an exhaustive study of 265 autonomous driving datasets from multiple perspectives, including sensor modalities, data size, tasks, and contextual conditions. We introduce a novel metric to evaluate the impact of datasets, which can also be a guide for creating new datasets. Besides, we analyze the annotation processes, existing labeling tools, and the annotation quality of datasets, showing the importance of establishing a standard annotation pipeline. On the other hand, we thoroughly analyze the impact of geographical and adversarial environmental conditions on the performance of autonomous driving systems. Moreover, we exhibit the data distribution of several vital datasets and discuss their pros and cons accordingly. Finally, we discuss the current challenges and the development trend of the future autonomous driving datasets.
4/24/2024
Bench2Drive: Towards Multi-Ability Benchmarking of Closed-Loop End-To-End Autonomous Driving
Xiaosong Jia, Zhenjie Yang, Qifeng Li, Zhiyuan Zhang, Junchi Yan
0
0
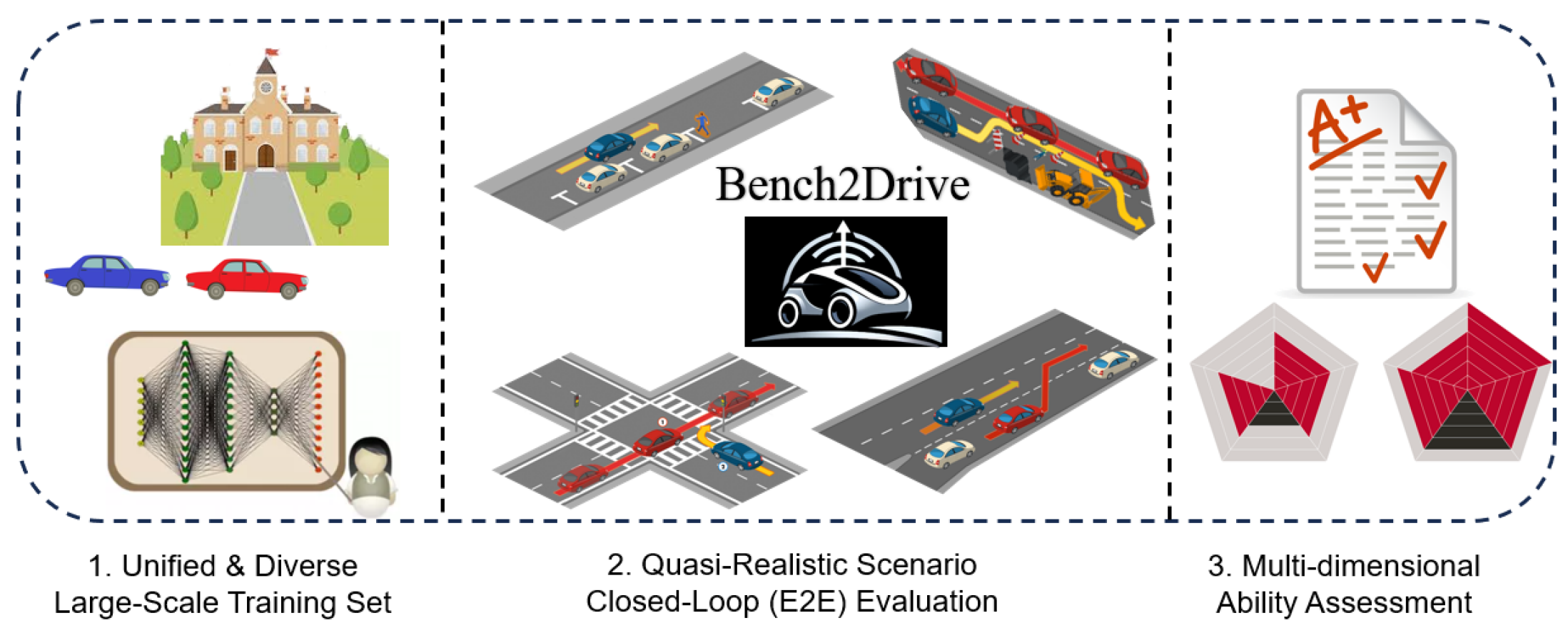
In an era marked by the rapid scaling of foundation models, autonomous driving technologies are approaching a transformative threshold where end-to-end autonomous driving (E2E-AD) emerges due to its potential of scaling up in the data-driven manner. However, existing E2E-AD methods are mostly evaluated under the open-loop log-replay manner with L2 errors and collision rate as metrics (e.g., in nuScenes), which could not fully reflect the driving performance of algorithms as recently acknowledged in the community. For those E2E-AD methods evaluated under the closed-loop protocol, they are tested in fixed routes (e.g., Town05Long and Longest6 in CARLA) with the driving score as metrics, which is known for high variance due to the unsmoothed metric function and large randomness in the long route. Besides, these methods usually collect their own data for training, which makes algorithm-level fair comparison infeasible. To fulfill the paramount need of comprehensive, realistic, and fair testing environments for Full Self-Driving (FSD), we present Bench2Drive, the first benchmark for evaluating E2E-AD systems' multiple abilities in a closed-loop manner. Bench2Drive's official training data consists of 2 million fully annotated frames, collected from 10000 short clips uniformly distributed under 44 interactive scenarios (cut-in, overtaking, detour, etc), 23 weathers (sunny, foggy, rainy, etc), and 12 towns (urban, village, university, etc) in CARLA v2. Its evaluation protocol requires E2E-AD models to pass 44 interactive scenarios under different locations and weathers which sums up to 220 routes and thus provides a comprehensive and disentangled assessment about their driving capability under different situations. We implement state-of-the-art E2E-AD models and evaluate them in Bench2Drive, providing insights regarding current status and future directions.
6/12/2024

100 Drivers, 2200 km: A Natural Dataset of Driving Style toward Human-centered Intelligent Driving Systems
Chaopeng Zhang, Wenshuo Wang, Zhaokun Chen, Junqiang Xi
0
0
Effective driving style analysis is critical to developing human-centered intelligent driving systems that consider drivers' preferences. However, the approaches and conclusions of most related studies are diverse and inconsistent because no unified datasets tagged with driving styles exist as a reliable benchmark. The absence of explicit driving style labels makes verifying different approaches and algorithms difficult. This paper provides a new benchmark by constructing a natural dataset of Driving Style (100-DrivingStyle) tagged with the subjective evaluation of 100 drivers' driving styles. In this dataset, the subjective quantification of each driver's driving style is from themselves and an expert according to the Likert-scale questionnaire. The testing routes are selected to cover various driving scenarios, including highways, urban, highway ramps, and signalized traffic. The collected driving data consists of lateral and longitudinal manipulation information, including steering angle, steering speed, lateral acceleration, throttle position, throttle rate, brake pressure, etc. This dataset is the first to provide detailed manipulation data with driving-style tags, and we demonstrate its benchmark function using six classifiers. The 100-DrivingStyle dataset is available via https://github.com/chaopengzhang/100-DrivingStyle-Dataset
6/13/2024
GAD-Generative Learning for HD Map-Free Autonomous Driving
Weijian Sun, Yanbo Jia, Qi Zeng, Zihao Liu, Jiang Liao, Yue Li, Xianfeng Li
0
0
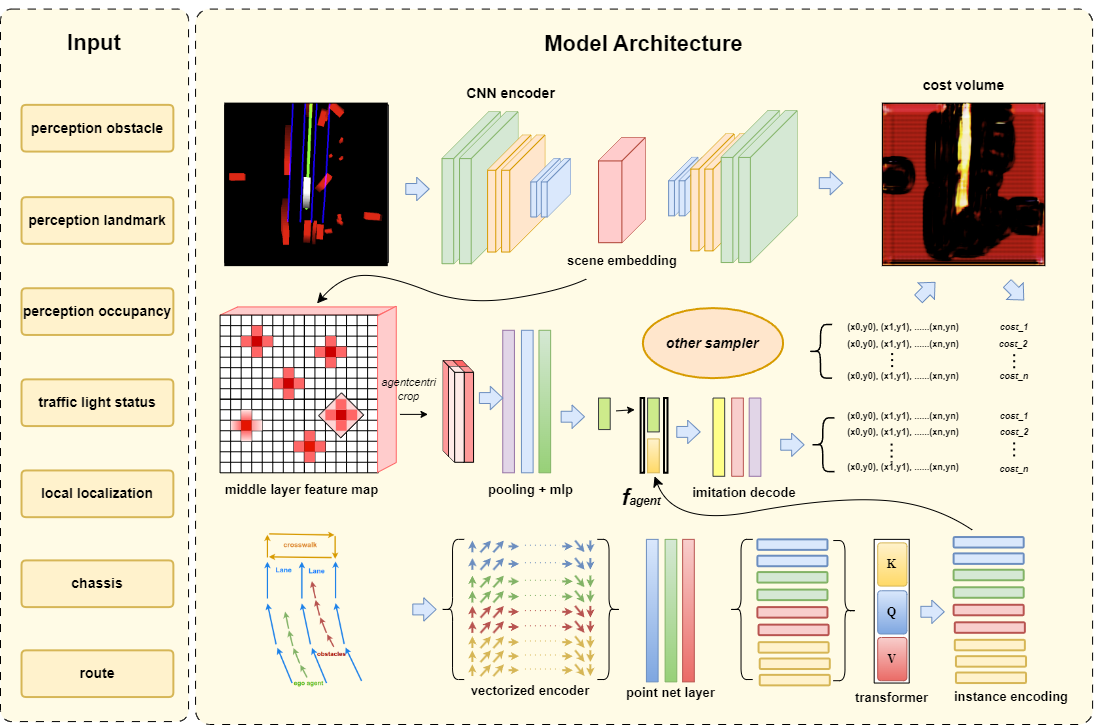
Deep-learning-based techniques have been widely adopted for autonomous driving software stacks for mass production in recent years, focusing primarily on perception modules, with some work extending this method to prediction modules. However, the downstream planning and control modules are still designed with hefty handcrafted rules, dominated by optimization-based methods such as quadratic programming or model predictive control. This results in a performance bottleneck for autonomous driving systems in that corner cases simply cannot be solved by enumerating hand-crafted rules. We present a deep-learning-based approach that brings prediction, decision, and planning modules together with the attempt to overcome the rule-based methods' deficiency in real-world applications of autonomous driving, especially for urban scenes. The DNN model we proposed is solely trained with 10 hours of human driver data, and it supports all mass-production ADAS features available on the market to date. This method is deployed onto a Jiyue test car with no modification to its factory-ready sensor set and compute platform. the feasibility, usability, and commercial potential are demonstrated in this article.
6/3/2024