Data-Driven Goal Recognition Design for General Behavioral Agents
2404.03054
0
0

Abstract
Goal recognition design aims to make limited modifications to decision-making environments with the goal of making it easier to infer the goals of agents acting within those environments. Although various research efforts have been made in goal recognition design, existing approaches are computationally demanding and often assume that agents are (near-)optimal in their decision-making. To address these limitations, we introduce a data-driven approach to goal recognition design that can account for agents with general behavioral models. Following existing literature, we use worst-case distinctiveness($textit{wcd}$) as a measure of the difficulty in inferring the goal of an agent in a decision-making environment. Our approach begins by training a machine learning model to predict the $textit{wcd}$ for a given environment and the agent behavior model. We then propose a gradient-based optimization framework that accommodates various constraints to optimize decision-making environments for enhanced goal recognition. Through extensive simulations, we demonstrate that our approach outperforms existing methods in reducing $textit{wcd}$ and enhancing runtime efficiency in conventional setup. Moreover, our approach also adapts to settings in which existing approaches do not apply, such as those involving flexible budget constraints, more complex environments, and suboptimal agent behavior. Finally, we have conducted human-subject experiments which confirm that our method can create environments that facilitate efficient goal recognition from real-world human decision-makers.
Create account to get full access
Overview
- This paper proposes a data-driven approach to goal recognition design for general behavioral agents.
- The authors developed a framework that allows agents to infer the goals of other agents based on observed behavior.
- The goal recognition system is designed to work with a variety of agent architectures and environments, making it broadly applicable.
Plain English Explanation
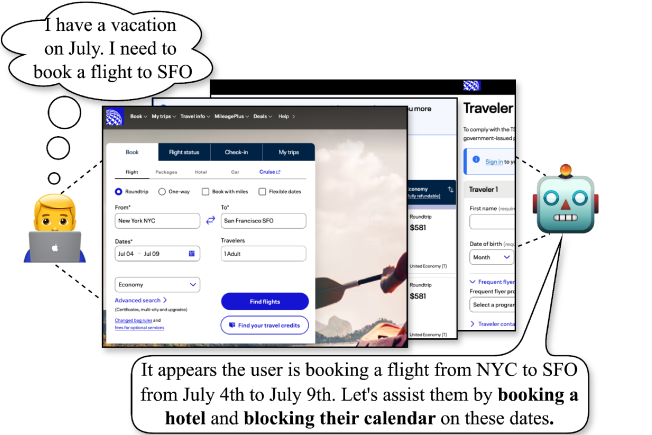
The paper describes a new way for artificial intelligence (AI) systems to figure out what goals or objectives other AI systems are trying to achieve. This is an important capability, as understanding the intentions of other agents can help an AI system interact with them more effectively.
Imagine you're playing a video game where you control one character, and there are other characters controlled by the computer. If you could tell what those computer-controlled characters are trying to accomplish, it would be easier for you to cooperate with them, compete against them, or avoid their actions. The goal recognition framework proposed in this paper aims to give AI systems that kind of understanding.
The key insight is that by observing the actions and behaviors of other agents, it's possible to infer their underlying goals. The researchers developed a flexible, data-driven approach that can work with different types of AI agents operating in different environments. This makes the goal recognition system versatile and able to handle a wide range of scenarios.
Technical Explanation
The paper introduces a data-driven framework for goal recognition that can work with general behavioral agents. The framework consists of three main components:
-
Behavior Representation: The system observes the actions and state changes of the target agent and represents this information in a way that can be used for goal inference.
-
Goal Recognition Model: This is the core of the system, a machine learning model that takes the observed behavior representation and infers the most likely goal or goals the agent is pursuing.
-
Goal Recognition Design: The authors describe a process for designing the goal recognition system, including collecting training data, engineering relevant features, and optimizing the model.
The framework is designed to be flexible, allowing it to work with diverse agent architectures and environments. The authors demonstrate the effectiveness of their approach through experiments in simulated domains, showing that the goal recognition system can accurately infer the goals of other agents.
Critical Analysis
The paper presents a well-designed and promising approach to goal recognition for general behavioral agents. The data-driven nature of the framework allows it to be applied to a wide range of scenarios, which is a key strength.
That said, the authors acknowledge some limitations of their work. The evaluation is conducted in relatively simple, simulated environments, and it's not clear how well the system would scale to more complex, real-world settings. Additionally, the framework relies on the availability of appropriate training data, which may not always be easy to obtain.
Further research could explore ways to make the goal recognition system more robust and adaptable, potentially by incorporating additional context or using unsupervised learning techniques. Investigating the system's performance in more challenging, dynamic environments would also be valuable.
Conclusion
This paper makes a valuable contribution to the field of multi-agent systems by introducing a flexible, data-driven approach to goal recognition. By allowing AI agents to better understand the intentions of other agents, the proposed framework has the potential to enable more effective collaboration, coordination, and competition in a wide range of applications, from video games to real-world robotic systems. As the field of AI continues to advance, techniques like this will be increasingly important for developing intelligent agents that can navigate complex, multi-agent environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Goal Recognition via Linear Programming
Felipe Meneguzzi, Lu'isa R. de A. Santos, Ramon Fraga Pereira, Andr'e G. Pereira
0
0
Goal Recognition is the task by which an observer aims to discern the goals that correspond to plans that comply with the perceived behavior of subject agents given as a sequence of observations. Research on Goal Recognition as Planning encompasses reasoning about the model of a planning task, the observations, and the goals using planning techniques, resulting in very efficient recognition approaches. In this article, we design novel recognition approaches that rely on the Operator-Counting framework, proposing new constraints, and analyze their constraints' properties both theoretically and empirically. The Operator-Counting framework is a technique that efficiently computes heuristic estimates of cost-to-goal using Integer/Linear Programming (IP/LP). In the realm of theory, we prove that the new constraints provide lower bounds on the cost of plans that comply with observations. We also provide an extensive empirical evaluation to assess how the new constraints improve the quality of the solution, and we found that they are especially informed in deciding which goals are unlikely to be part of the solution. Our novel recognition approaches have two pivotal advantages: first, they employ new IP/LP constraints for efficiently recognizing goals; second, we show how the new IP/LP constraints can improve the recognition of goals under both partial and noisy observability.
4/12/2024
Identifying User Goals from UI Trajectories
Omri Berkovitch, Sapir Caduri, Noam Kahlon, Anatoly Efros, Avi Caciularu, Ido Dagan
0
0
Autonomous agents that interact with graphical user interfaces (GUIs) hold significant potential for enhancing user experiences. To further improve these experiences, agents need to be personalized and proactive. By effectively comprehending user intentions through their actions and interactions with GUIs, agents will be better positioned to achieve these goals. This paper introduces the task of goal identification from observed UI trajectories, aiming to infer the user's intended task based on their GUI interactions. We propose a novel evaluation metric to assess whether two task descriptions are paraphrases within a specific UI environment. By Leveraging the inverse relation with the UI automation task, we utilized the Android-In-The-Wild and Mind2Web datasets for our experiments. Using our metric and these datasets, we conducted several experiments comparing the performance of humans and state-of-the-art models, specifically GPT-4 and Gemini-1.5 Pro. Our results show that Gemini performs better than GPT but still underperforms compared to humans, indicating significant room for improvement.
7/2/2024
An approach to improve agent learning via guaranteeing goal reaching in all episodes
Pavel Osinenko, Grigory Yaremenko, Georgiy Malaniya, Anton Bolychev
0
0
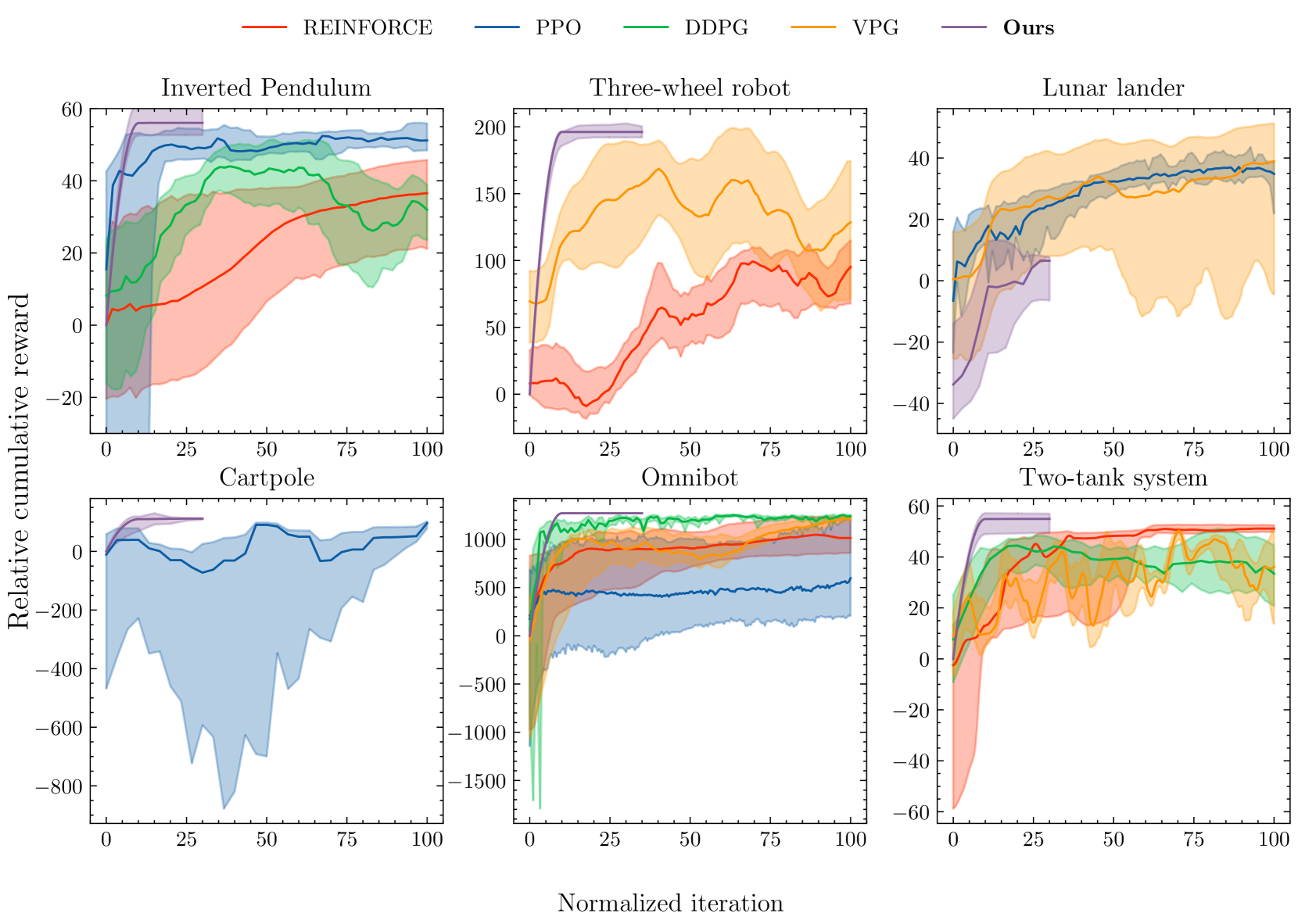
Reinforcement learning is commonly concerned with problems of maximizing accumulated rewards in Markov decision processes. Oftentimes, a certain goal state or a subset of the state space attain maximal reward. In such a case, the environment may be considered solved when the goal is reached. Whereas numerous techniques, learning or non-learning based, exist for solving environments, doing so optimally is the biggest challenge. Say, one may choose a reward rate which penalizes the action effort. Reinforcement learning is currently among the most actively developed frameworks for solving environments optimally by virtue of maximizing accumulated reward, in other words, returns. Yet, tuning agents is a notoriously hard task as reported in a series of works. Our aim here is to help the agent learn a near-optimal policy efficiently while ensuring a goal reaching property of some basis policy that merely solves the environment. We suggest an algorithm, which is fairly flexible, and can be used to augment practically any agent as long as it comprises of a critic. A formal proof of a goal reaching property is provided. Simulation experiments on six problems under five agents, including the benchmarked one, provided an empirical evidence that the learning can indeed be boosted while ensuring goal reaching property.
5/30/2024
💬
SelfGoal: Your Language Agents Already Know How to Achieve High-level Goals
Ruihan Yang, Jiangjie Chen, Yikai Zhang, Siyu Yuan, Aili Chen, Kyle Richardson, Yanghua Xiao, Deqing Yang
0
0
Language agents powered by large language models (LLMs) are increasingly valuable as decision-making tools in domains such as gaming and programming. However, these agents often face challenges in achieving high-level goals without detailed instructions and in adapting to environments where feedback is delayed. In this paper, we present SelfGoal, a novel automatic approach designed to enhance agents' capabilities to achieve high-level goals with limited human prior and environmental feedback. The core concept of SelfGoal involves adaptively breaking down a high-level goal into a tree structure of more practical subgoals during the interaction with environments while identifying the most useful subgoals and progressively updating this structure. Experimental results demonstrate that SelfGoal significantly enhances the performance of language agents across various tasks, including competitive, cooperative, and deferred feedback environments. Project page: https://selfgoal-agent.github.io.
6/10/2024