Decentralized Adaptive Aerospace Transportation of Unknown Loads Using A Team of Robots

0
Sign in to get full access
Overview
- This paper presents a decentralized approach for adaptive aerospace transportation of unknown loads using a team of robots.
- The proposed system allows a group of robots to collaboratively transport and maneuver payloads of uncertain size, weight, and shape without relying on a centralized control system.
- The researchers develop a decentralized control framework that enables the robots to dynamically adjust their roles and actions based on real-time sensor data and environmental feedback.
Plain English Explanation
In this paper, the researchers describe a way for a group of robots to work together to move and maneuver objects of unknown size, weight, and shape through the air. Instead of having a central control system telling the robots what to do, each robot can adjust its own actions based on what it senses about the object and the environment around it.
This decentralized approach allows the robots to be more flexible and adaptable when dealing with unexpected or changing conditions, like if the object's weight shifts or the environment becomes more obstacle-filled. The robots can dynamically change their roles and behaviors in real-time to ensure the object is transported safely and efficiently.
This could be useful for applications like autonomous planetary exploration or distributed cargo handling, where a team of robots needs to move irregularly shaped or unknown payloads without human intervention.
Technical Explanation
The paper presents a decentralized adaptive transportation framework that allows a team of robots to collaboratively maneuver and transport payloads with uncertain properties. The researchers develop a multi-agent control architecture where each robot uses local sensor data and communication with its neighbors to dynamically adjust its role and actions.
Key elements of the proposed system include:
- Distributed Decision-Making: Rather than relying on a centralized planner, each robot makes autonomous decisions based on its own observations and exchanges with nearby robots.
- Adaptive Load Modeling: The robots use real-time sensor data to construct and continuously update a probabilistic model of the unknown payload, including its size, weight, and center of mass.
- Reconfigurable Roles: The robots can dynamically transition between different roles (e.g. lifting, balancing, stabilizing) to respond to changes in the payload or environment.
- Collaborative Coordination: The robots communicate locally to coordinate their movements and ensure the payload remains stable and properly supported.
The researchers evaluate their approach through simulations and experiments involving a team of quadrotor robots transporting objects of varying size and weight. The results demonstrate the ability of the decentralized system to successfully navigate obstacles and maintain stability compared to a centralized control baseline.
Critical Analysis
The paper presents a promising approach for decentralized adaptive transportation of unknown payloads, but there are some potential limitations and areas for further research:
- The experiments focused on relatively simple object shapes and environments. Extending the approach to handle more complex, irregularly shaped payloads or cluttered, dynamic environments may require additional modeling and coordination capabilities.
- The proposed framework assumes reliable communication between robots, which may not always be feasible, especially in remote or GPS-denied settings. Developing robust strategies for dealing with communication failures or latency would be an important next step.
- While the decentralized nature offers advantages in flexibility and scalability, it may be challenging to ensure global optimality or satisfy mission-level objectives without some degree of centralized planning or high-level coordination.
Overall, the research demonstrates the potential benefits of distributed robotic systems for handling complex transportation tasks in uncertain environments. Further advancements in areas like multi-robot learning, robust communication, and hierarchical control could help expand the capabilities and applicability of this type of approach.
Conclusion
This paper presents a novel decentralized framework for adaptive aerospace transportation of unknown payloads using a team of robots. By enabling the robots to dynamically adjust their roles and behaviors based on real-time sensor data and local coordination, the system can effectively navigate and maneuver objects with uncertain properties without relying on a centralized control system.
The proposed approach could have significant implications for applications like autonomous cargo handling, extraterrestrial exploration, and disaster response, where the ability to adapt to unpredictable conditions and work collaboratively is crucial. While the research shows promising results, further development is needed to address potential limitations and expand the capabilities of this type of decentralized robotic system.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Decentralized Adaptive Aerospace Transportation of Unknown Loads Using A Team of Robots
Longsen Gao, Kevin Aubert, David Saldana, Claus Danielson, Rafael Fierro
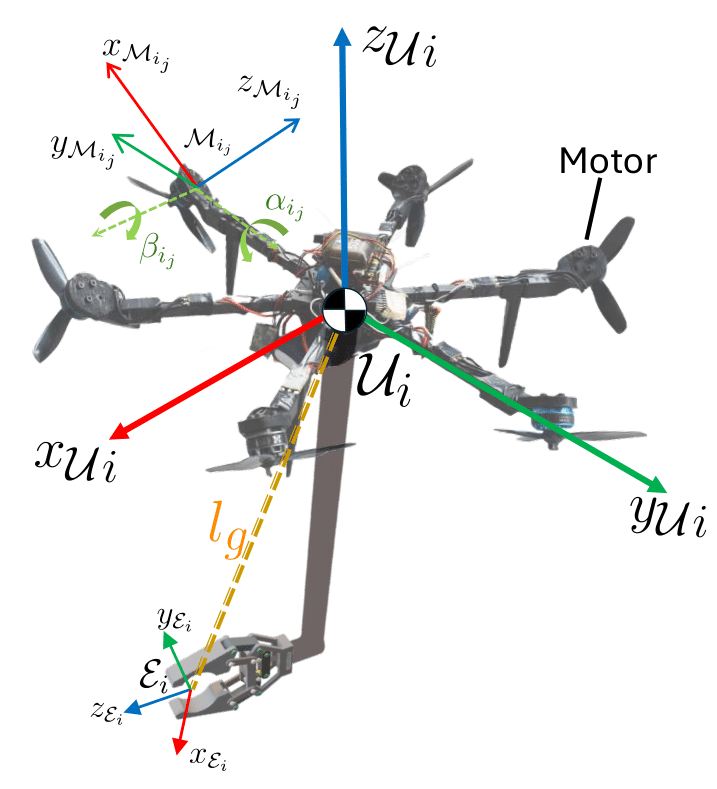
Transportation missions in aerospace are limited to the capability of each aerospace robot and the properties of the target transported object, such as mass, inertia, and grasping locations. We present a novel decentralized adaptive controller design for multiple robots that can be implemented in different kinds of aerospace robots. Our controller adapts to unknown objects in different gravity environments. We validate our method in an aerial scenario using multiple fully actuated hexarotors with grasping capabilities, and a space scenario using a group of space tugs. In both scenarios, the robots transport a payload cooperatively through desired three-dimensional trajectories. We show that our method can adapt to unexpected changes that include the loss of robots during the transportation mission.
Read more9/4/2024

0
Reinforcement Learning of Multi-robot Task Allocation for Multi-object Transportation with Infeasible Tasks
Yuma Shida, Tomohiko Jimbo, Tadashi Odashima, Takamitsu Matsubara
Multi-object transport using multi-robot systems has the potential for diverse practical applications such as delivery services owing to its efficient individual and scalable cooperative transport. However, allocating transportation tasks of objects with unknown weights remains challenging. Moreover, the presence of infeasible tasks (untransportable objects) can lead to robot stoppage (deadlock). This paper proposes a framework for dynamic task allocation that involves storing task experiences for each task in a scalable manner with respect to the number of robots. First, these experiences are broadcasted from the cloud server to the entire robot system. Subsequently, each robot learns the exclusion levels for each task based on those task experiences, enabling it to exclude infeasible tasks and reset its task priorities. Finally, individual transportation, cooperative transportation, and the temporary exclusion of tasks considered infeasible are achieved. The scalability and versatility of the proposed method were confirmed through numerical experiments with an increased number of robots and objects, including unlearned weight objects. The effectiveness of the temporary deadlock avoidance was also confirmed by introducing additional robots within an episode. The proposed method enables the implementation of task allocation strategies that are feasible for different numbers of robots and various transport tasks without prior consideration of feasibility.
Read more4/19/2024
🧪
0
A Novel Methodology for Autonomous Planetary Exploration Using Multi-Robot Teams
Sarah Swinton, Jan-Hendrik Ewers, Euan McGookin, David Anderson, Douglas Thomson
One of the fundamental limiting factors in planetary exploration is the autonomous capabilities of planetary exploration rovers. This study proposes a novel methodology for trustworthy autonomous multi-robot teams which incorporates data from multiple sources (HiRISE orbiter imaging, probability distribution maps, and on-board rover sensors) to find efficient exploration routes in Jezero crater. A map is generated, consisting of a 3D terrain model, traversability analysis, and probability distribution map of points of scientific interest. A three-stage mission planner generates an efficient route, which maximises the accumulated probability of identifying points of interest. A 4D RRT* algorithm is used to determine smooth, flat paths, and prioritised planning is used to coordinate a safe set of paths. The above methodology is shown to coordinate safe and efficient rover paths, which ensure the rovers remain within their nominal pitch and roll limits throughout operation.
Read more5/22/2024

0
Auto-Multilift: Distributed Learning and Control for Cooperative Load Transportation With Quadrotors
Bingheng Wang, Rui Huang, Lin Zhao
Designing motion control and planning algorithms for multilift systems remains challenging due to the complexities of dynamics, collision avoidance, actuator limits, and scalability. Existing methods that use optimization and distributed techniques effectively address these constraints and scalability issues. However, they often require substantial manual tuning, leading to suboptimal performance. This paper proposes Auto-Multilift, a novel framework that automates the tuning of model predictive controllers (MPCs) for multilift systems. We model the MPC cost functions with deep neural networks (DNNs), enabling fast online adaptation to various scenarios. We develop a distributed policy gradient algorithm to train these DNNs efficiently in a closed-loop manner. Central to our algorithm is distributed sensitivity propagation, which is built on fully exploiting the unique dynamic couplings within the multilift system. It parallelizes gradient computation across quadrotors and focuses on actual system state sensitivities relative to key MPC parameters. Extensive simulations demonstrate favorable scalability to a large number of quadrotors. Our method outperforms a state-of-the-art open-loop MPC tuning approach by effectively learning adaptive MPCs from trajectory tracking errors. It also excels in learning an adaptive reference for reconfiguring the system when traversing multiple narrow slots.
Read more9/14/2024