Deep Fr'echet Regression

0
Sign in to get full access
Overview
- Introduces a new machine learning method called Deep Fréchet Regression
- Focuses on regression problems where the output data lies in a metric space, rather than the typical Euclidean space
- Leverages deep neural networks to learn a mapping from the input space to the output metric space
- Provides a flexible and powerful framework for a wide range of applications involving non-Euclidean data
Plain English Explanation
In many real-world problems, the data we want to predict or model may not fit neatly into the standard Euclidean space. For example, we may want to predict the shape of an object, the trajectory of a robot, or the structure of a molecule. In these cases, the output data lives in a more complex, non-Euclidean "metric space."
Deep Fréchet Regression introduces a new machine learning technique to handle these types of regression problems. The key idea is to use deep neural networks to learn a mapping from the input data (which could be images, sensor readings, etc.) directly into the output metric space.
This is done by minimizing the Fréchet distance between the predicted and true outputs, which provides a natural way to compare objects in a metric space. The neural network is trained to output predictions that are as close as possible to the true outputs in this metric space.
This flexible framework allows Deep Fréchet Regression to be applied to a wide range of applications involving non-Euclidean data, such as robot learning on manifolds, network regression, and learning in non-metric spaces. By directly working in the output metric space, it can capture the intrinsic structure of the data in a more powerful way than traditional regression methods.
Technical Explanation
The paper introduces the Deep Fréchet Regression framework, which extends traditional regression techniques to handle output data that lies in a metric space, rather than the typical Euclidean space.
The key components of the approach are:
- Metric Space Output: The model learns a mapping from the input space (e.g., images, sensor readings) directly to the output metric space, rather than to a Euclidean vector space.
- Fréchet Distance Loss: The model is trained by minimizing the Fréchet distance between the predicted outputs and the true outputs in the metric space. This provides a natural way to compare and optimize for the intrinsic structure of the output data.
- Deep Neural Network Architecture: A deep neural network is used as the regression model, allowing it to learn complex, non-linear mappings from inputs to outputs in the metric space.
The authors demonstrate the effectiveness of Deep Fréchet Regression on a variety of applications, including robot learning on manifolds, network regression, and learning in non-metric spaces. By directly working in the output metric space, the model can capture the intrinsic structure of the data in a more powerful way than traditional regression methods.
Critical Analysis
The paper presents a novel and promising approach to regression problems involving non-Euclidean output data. The authors acknowledge that working in metric spaces introduces additional challenges, such as the need for efficient optimization of the Fréchet distance loss function.
One potential limitation is the computational complexity of the Fréchet distance, which may limit the scalability of the method to very large-scale problems. The authors mention that further research is needed to develop more efficient optimization algorithms for this loss function.
Additionally, the paper does not provide a comprehensive analysis of the theoretical properties of the Deep Fréchet Regression model, such as its convergence guarantees or the conditions under which it may outperform other regression methods. Empirical evaluations on a wider range of datasets and applications would also help to further validate the effectiveness of the approach.
Conclusion
The Deep Fréchet Regression framework introduced in this paper represents an important advancement in the field of machine learning, particularly for problems involving non-Euclidean output data. By directly working in the output metric space, the model can capture the intrinsic structure of the data in a more powerful way than traditional regression methods.
This flexible and powerful approach has the potential to enable new applications and insights across a wide range of domains, from robotics and network analysis to materials science and beyond. As the authors note, further research is needed to address certain computational and theoretical challenges, but the overall contribution of this work is highly significant and impactful.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Deep Fr'echet Regression
Su I Iao, Yidong Zhou, Hans-Georg Muller
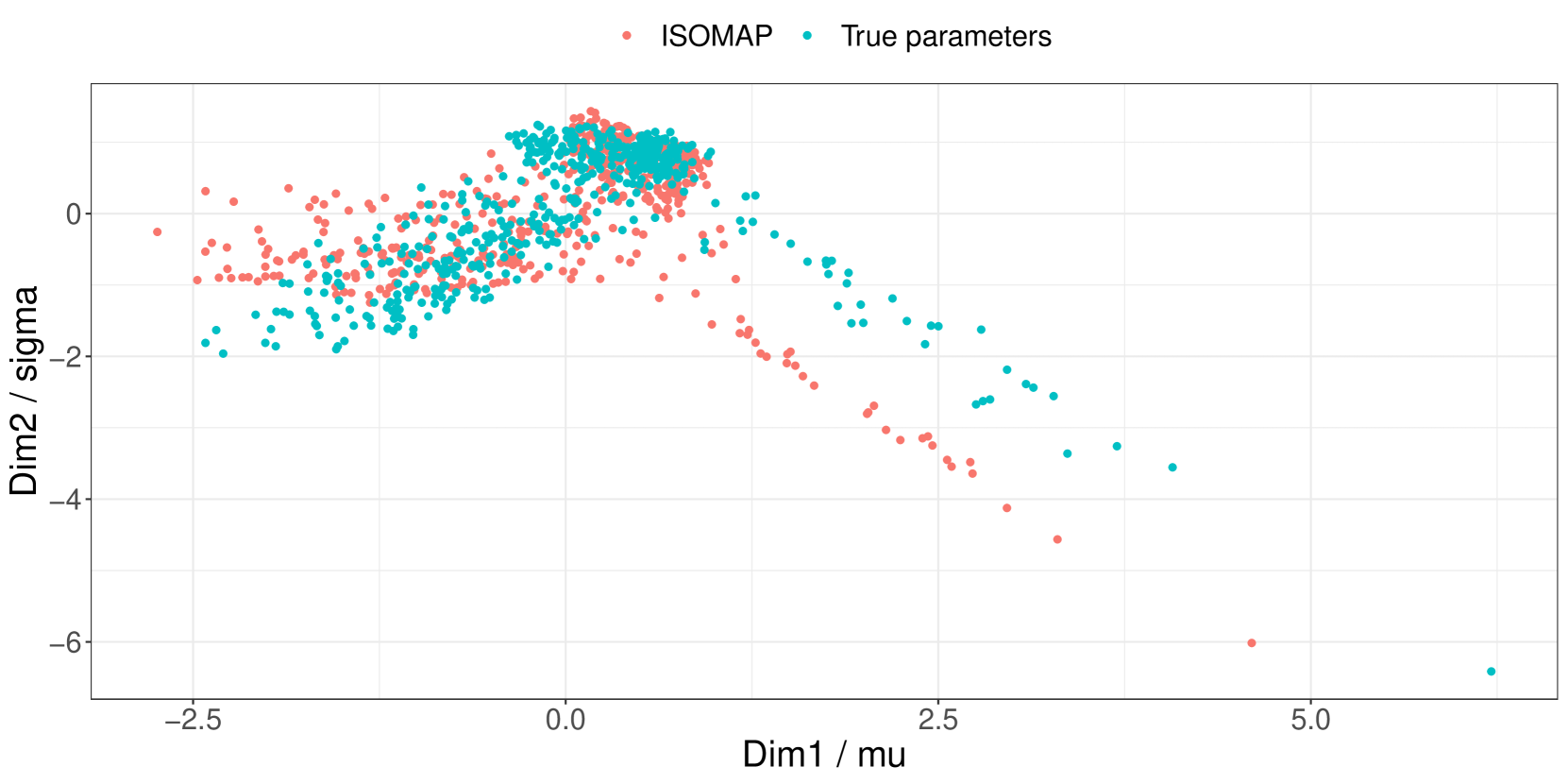
Advancements in modern science have led to the increasing availability of non-Euclidean data in metric spaces. This paper addresses the challenge of modeling relationships between non-Euclidean responses and multivariate Euclidean predictors. We propose a flexible regression model capable of handling high-dimensional predictors without imposing parametric assumptions. Two primary challenges are addressed: the curse of dimensionality in nonparametric regression and the absence of linear structure in general metric spaces. The former is tackled using deep neural networks, while for the latter we demonstrate the feasibility of mapping the metric space where responses reside to a low-dimensional Euclidean space using manifold learning. We introduce a reverse mapping approach, employing local Fr'echet regression, to map the low-dimensional manifold representations back to objects in the original metric space. We develop a theoretical framework, investigating the convergence rate of deep neural networks under dependent sub-Gaussian noise with bias. The convergence rate of the proposed regression model is then obtained by expanding the scope of local Fr'echet regression to accommodate multivariate predictors in the presence of errors in predictors. Simulations and case studies show that the proposed model outperforms existing methods for non-Euclidean responses, focusing on the special cases of probability measures and networks.
Read more8/1/2024

0
Sufficient dimension reduction for regression with metric space-valued responses
Abdul-Nasah Soale, Yuexiao Dong
Data visualization and dimension reduction for regression between a general metric space-valued response and Euclidean predictors is proposed. Current Fr'ech'et dimension reduction methods require that the response metric space be continuously embeddable into a Hilbert space, which imposes restriction on the type of metric and kernel choice. We relax this assumption by proposing a Euclidean embedding technique which avoids the use of kernels. Under this framework, classical dimension reduction methods such as ordinary least squares and sliced inverse regression are extended. An extensive simulation experiment demonstrates the superior performance of the proposed method on synthetic data compared to existing methods where applicable. The real data analysis of factors influencing the distribution of COVID-19 transmission in the U.S. and the association between BMI and structural brain connectivity of healthy individuals are also investigated.
Read more5/28/2024
0
Semi-supervised Fr'echet Regression
Rui Qiu, Zhou Yu, Zhenhua Lin
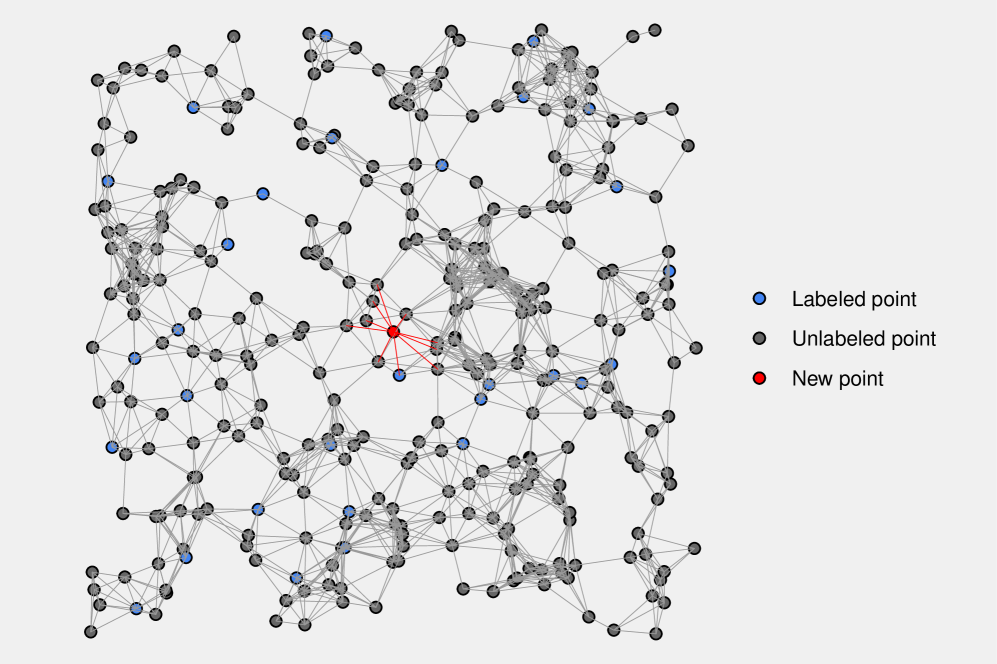
This paper explores the field of semi-supervised Fr'echet regression, driven by the significant costs associated with obtaining non-Euclidean labels. Methodologically, we propose two novel methods: semi-supervised NW Fr'echet regression and semi-supervised kNN Fr'echet regression, both based on graph distance acquired from all feature instances. These methods extend the scope of existing semi-supervised Euclidean regression methods. We establish their convergence rates with limited labeled data and large amounts of unlabeled data, taking into account the low-dimensional manifold structure of the feature space. Through comprehensive simulations across diverse settings and applications to real data, we demonstrate the superior performance of our methods over their supervised counterparts. This study addresses existing research gaps and paves the way for further exploration and advancements in the field of semi-supervised Fr'echet regression.
Read more4/17/2024
↗️
0
Non-parametric regression for robot learning on manifolds
P. C. Lopez-Custodio, K. Bharath, A. Kucukyilmaz, S. P. Preston
Many of the tools available for robot learning were designed for Euclidean data. However, many applications in robotics involve manifold-valued data. A common example is orientation; this can be represented as a 3-by-3 rotation matrix or a quaternion, the spaces of which are non-Euclidean manifolds. In robot learning, manifold-valued data are often handled by relating the manifold to a suitable Euclidean space, either by embedding the manifold or by projecting the data onto one or several tangent spaces. These approaches can result in poor predictive accuracy, and convoluted algorithms. In this paper, we propose an intrinsic approach to regression that works directly within the manifold. It involves taking a suitable probability distribution on the manifold, letting its parameter be a function of a predictor variable, such as time, then estimating that function non-parametrically via a local likelihood method that incorporates a kernel. We name the method kernelised likelihood estimation. The approach is conceptually simple, and generally applicable to different manifolds. We implement it with three different types of manifold-valued data that commonly appear in robotics applications. The results of these experiments show better predictive accuracy than projection-based algorithms.
Read more5/15/2024