DeformGS: Scene Flow in Highly Deformable Scenes for Deformable Object Manipulation

0
Sign in to get full access
Overview
- The paper presents a new method called MD-Splatting for learning metric deformation from 4D Gaussians in highly deformable scenes.
- The method uses a neural network to learn a deformation field from a set of 4D Gaussian distributions that represent the deformation in a scene.
- This allows for efficient and accurate novel view synthesis of highly deformable scenes, with applications in areas like augmented reality and robotics.
Plain English Explanation
MD-Splatting: Learning Metric Deformation from 4D Gaussians in Highly Deformable Scenes is a new method for creating realistic 3D models of highly deformable scenes. These are scenes that change shape a lot, like a person's face or a piece of clothing.
The key idea is to represent the deformation in the scene using 4D Gaussian distributions. A Gaussian is a bell-shaped curve that can be used to model many different types of data. In this case, the 4D Gaussians model how the shape of the scene changes over time.
The researchers then train a neural network to learn this deformation field from the 4D Gaussians. This allows the network to generate new views of the scene, even if the viewpoint is different from the original camera. This is useful for applications like augmented reality, where you want to insert virtual objects into a real-world scene.
The advantage of this method is that it can efficiently and accurately model highly deformable scenes, which is challenging for many other 3D reconstruction techniques. This could have important applications in areas like robotics, where being able to understand and interact with deformable objects is crucial.
Technical Explanation
The paper presents a new method called MD-Splatting for learning a metric deformation field from a set of 4D Gaussian distributions that represent the deformation in a scene.
The key components of the method are:
- 4D Gaussian Representation: The researchers model the deformation in the scene using a set of 4D Gaussian distributions, where the 4D refers to 3D spatial coordinates plus time.
- Neural Network Architecture: They design a neural network that takes these 4D Gaussians as input and learns to predict a deformation field that can be used for novel view synthesis.
- Splatting-based Rendering: The network outputs a deformation field, which is then used to splat the 4D Gaussians onto a 2D image plane to generate the final rendered image.
Through extensive experiments, the authors show that their MD-Splatting method can outperform state-of-the-art techniques for novel view synthesis of highly deformable scenes, both in terms of image quality and computational efficiency.
Critical Analysis
The MD-Splatting method presented in the paper is a promising approach for modeling and rendering highly deformable 3D scenes. However, there are a few potential limitations and areas for further research:
- Generalization Capability: While the method shows strong performance on the tested scenes, it's unclear how well it would generalize to a wider range of highly deformable objects and scenes. Further evaluation on a more diverse dataset would be helpful.
- Temporal Consistency: The paper focuses on novel view synthesis, but the temporal consistency of the deformation field over time is also an important consideration, especially for applications like augmented reality or robotics.
- Interpretability: The neural network-based approach used in MD-Splatting may be difficult to interpret, which could limit its transparency and explainability.
Overall, the MD-Splatting method represents an exciting development in the field of 3D reconstruction and rendering, with promising applications in areas like augmented reality and robotics. However, continued research and evaluation will be important to address the potential limitations and further advance the state of the art.
Conclusion
The MD-Splatting method presented in this paper introduces a novel approach for modeling and rendering highly deformable 3D scenes. By representing the deformation using 4D Gaussian distributions and learning a deformation field with a neural network, the method can efficiently and accurately generate new views of these complex, dynamic scenes.
This work has important implications for applications like augmented reality, where being able to realistically insert virtual objects into real-world scenes is crucial. It also has potential applications in robotics, where understanding and interacting with deformable objects is a significant challenge. While the method shows promising results, continued research and evaluation will be important to further advance the state of the art in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
DeformGS: Scene Flow in Highly Deformable Scenes for Deformable Object Manipulation
Bardienus P. Duisterhof, Zhao Mandi, Yunchao Yao, Jia-Wei Liu, Jenny Seidenschwarz, Mike Zheng Shou, Deva Ramanan, Shuran Song, Stan Birchfield, Bowen Wen, Jeffrey Ichnowski
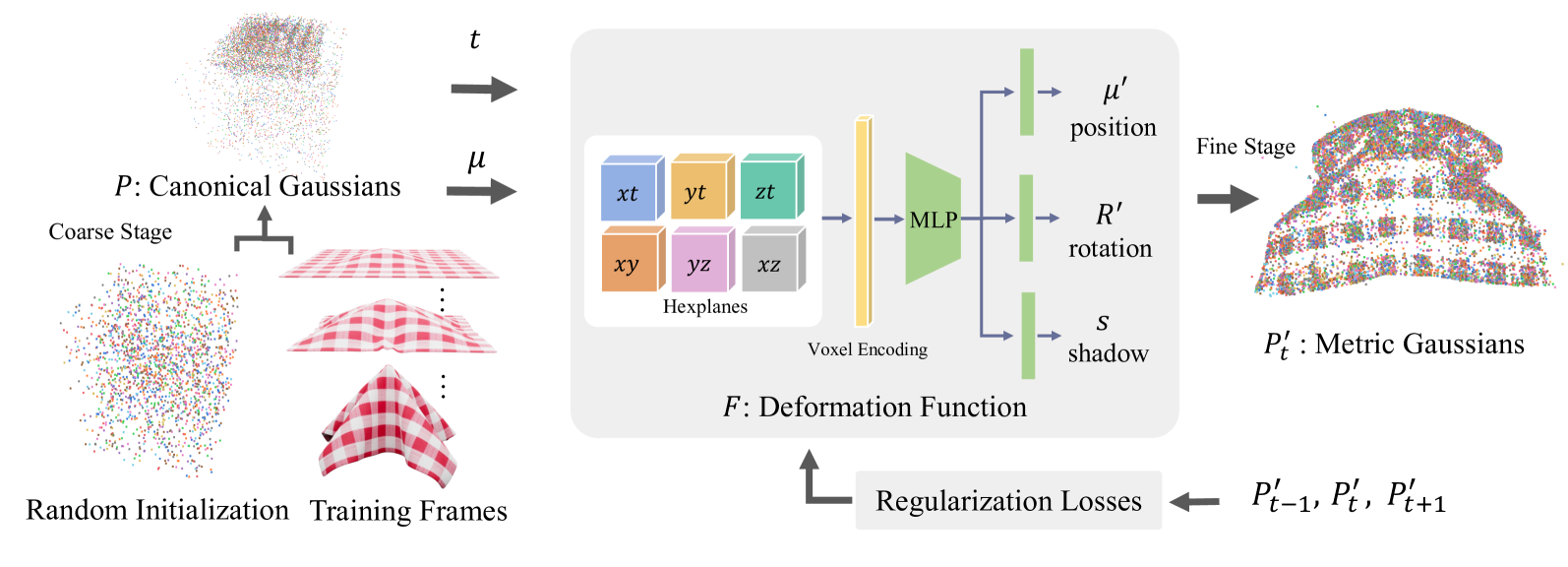
Teaching robots to fold, drape, or reposition deformable objects such as cloth will unlock a variety of automation applications. While remarkable progress has been made for rigid object manipulation, manipulating deformable objects poses unique challenges, including frequent occlusions, infinite-dimensional state spaces and complex dynamics. Just as object pose estimation and tracking have aided robots for rigid manipulation, dense 3D tracking (scene flow) of highly deformable objects will enable new applications in robotics while aiding existing approaches, such as imitation learning or creating digital twins with real2sim transfer. We propose DeformGS, an approach to recover scene flow in highly deformable scenes, using simultaneous video captures of a dynamic scene from multiple cameras. DeformGS builds on recent advances in Gaussian splatting, a method that learns the properties of a large number of Gaussians for state-of-the-art and fast novel-view synthesis. DeformGS learns a deformation function to project a set of Gaussians with canonical properties into world space. The deformation function uses a neural-voxel encoding and a multilayer perceptron (MLP) to infer Gaussian position, rotation, and a shadow scalar. We enforce physics-inspired regularization terms based on conservation of momentum and isometry, which leads to trajectories with smaller trajectory errors. We also leverage existing foundation models SAM and XMEM to produce noisy masks, and learn a per-Gaussian mask for better physics-inspired regularization. DeformGS achieves high-quality 3D tracking on highly deformable scenes with shadows and occlusions. In experiments, DeformGS improves 3D tracking by an average of 55.8% compared to the state-of-the-art. With sufficient texture, DeformGS achieves a median tracking error of 3.3 mm on a cloth of 1.5 x 1.5 m in area. Website: https://deformgs.github.io
Read more9/2/2024

0
Deform3DGS: Flexible Deformation for Fast Surgical Scene Reconstruction with Gaussian Splatting
Shuojue Yang, Qian Li, Daiyun Shen, Bingchen Gong, Qi Dou, Yueming Jin
Tissue deformation poses a key challenge for accurate surgical scene reconstruction. Despite yielding high reconstruction quality, existing methods suffer from slow rendering speeds and long training times, limiting their intraoperative applicability. Motivated by recent progress in 3D Gaussian Splatting, an emerging technology in real-time 3D rendering, this work presents a novel fast reconstruction framework, termed Deform3DGS, for deformable tissues during endoscopic surgery. Specifically, we introduce 3D GS into surgical scenes by integrating a point cloud initialization to improve reconstruction. Furthermore, we propose a novel flexible deformation modeling scheme (FDM) to learn tissue deformation dynamics at the level of individual Gaussians. Our FDM can model the surface deformation with efficient representations, allowing for real-time rendering performance. More importantly, FDM significantly accelerates surgical scene reconstruction, demonstrating considerable clinical values, particularly in intraoperative settings where time efficiency is crucial. Experiments on DaVinci robotic surgery videos indicate the efficacy of our approach, showcasing superior reconstruction fidelity PSNR: (37.90) and rendering speed (338.8 FPS) while substantially reducing training time to only 1 minute/scene. Our code is available at https://github.com/jinlab-imvr/Deform3DGS.
Read more5/31/2024

0
SurgicalGaussian: Deformable 3D Gaussians for High-Fidelity Surgical Scene Reconstruction
Weixing Xie, Junfeng Yao, Xianpeng Cao, Qiqin Lin, Zerui Tang, Xiao Dong, Xiaohu Guo
Dynamic reconstruction of deformable tissues in endoscopic video is a key technology for robot-assisted surgery. Recent reconstruction methods based on neural radiance fields (NeRFs) have achieved remarkable results in the reconstruction of surgical scenes. However, based on implicit representation, NeRFs struggle to capture the intricate details of objects in the scene and cannot achieve real-time rendering. In addition, restricted single view perception and occluded instruments also propose special challenges in surgical scene reconstruction. To address these issues, we develop SurgicalGaussian, a deformable 3D Gaussian Splatting method to model dynamic surgical scenes. Our approach models the spatio-temporal features of soft tissues at each time stamp via a forward-mapping deformation MLP and regularization to constrain local 3D Gaussians to comply with consistent movement. With the depth initialization strategy and tool mask-guided training, our method can remove surgical instruments and reconstruct high-fidelity surgical scenes. Through experiments on various surgical videos, our network outperforms existing method on many aspects, including rendering quality, rendering speed and GPU usage. The project page can be found at https://surgicalgaussian.github.io.
Read more7/9/2024

0
Per-Gaussian Embedding-Based Deformation for Deformable 3D Gaussian Splatting
Jeongmin Bae, Seoha Kim, Youngsik Yun, Hahyun Lee, Gun Bang, Youngjung Uh
As 3D Gaussian Splatting (3DGS) provides fast and high-quality novel view synthesis, it is a natural extension to deform a canonical 3DGS to multiple frames for representing a dynamic scene. However, previous works fail to accurately reconstruct complex dynamic scenes. We attribute the failure to the design of the deformation field, which is built as a coordinate-based function. This approach is problematic because 3DGS is a mixture of multiple fields centered at the Gaussians, not just a single coordinate-based framework. To resolve this problem, we define the deformation as a function of per-Gaussian embeddings and temporal embeddings. Moreover, we decompose deformations as coarse and fine deformations to model slow and fast movements, respectively. Also, we introduce a local smoothness regularization for per-Gaussian embedding to improve the details in dynamic regions. Project page: https://jeongminb.github.io/e-d3dgs/
Read more7/29/2024