Depth Awakens: A Depth-perceptual Attention Fusion Network for RGB-D Camouflaged Object Detection
2405.05614
0
0
🌐
Abstract
Camouflaged object detection (COD) presents a persistent challenge in accurately identifying objects that seamlessly blend into their surroundings. However, most existing COD models overlook the fact that visual systems operate within a genuine 3D environment. The scene depth inherent in a single 2D image provides rich spatial clues that can assist in the detection of camouflaged objects. Therefore, we propose a novel depth-perception attention fusion network that leverages the depth map as an auxiliary input to enhance the network's ability to perceive 3D information, which is typically challenging for the human eye to discern from 2D images. The network uses a trident-branch encoder to extract chromatic and depth information and their communications. Recognizing that certain regions of a depth map may not effectively highlight the camouflaged object, we introduce a depth-weighted cross-attention fusion module to dynamically adjust the fusion weights on depth and RGB feature maps. To keep the model simple without compromising effectiveness, we design a straightforward feature aggregation decoder that adaptively fuses the enhanced aggregated features. Experiments demonstrate the significant superiority of our proposed method over other states of the arts, which further validates the contribution of depth information in camouflaged object detection. The code will be available at https://github.com/xinran-liu00/DAF-Net.
Create account to get full access
Overview
- Camouflaged object detection (COD) is a persistent challenge, as objects can seamlessly blend into their surroundings.
- Most existing COD models overlook the importance of depth information from a 3D environment, which can provide valuable spatial clues for detection.
- This paper proposes a novel depth-perception attention fusion network that leverages depth maps as an auxiliary input to enhance the network's ability to perceive 3D information.
Plain English Explanation
Camouflaged object detection (COD) is a problem that has long puzzled researchers. When objects perfectly blend into their surroundings, it becomes incredibly difficult to identify them. Most existing COD models focus on analyzing 2D images, but they miss out on a crucial piece of information: depth. In the real world, we exist in a 3D environment, and the depth of a scene can provide important clues about the location and shape of camouflaged objects.
To address this shortcoming, the researchers have developed a new neural network that uses depth maps, in addition to regular 2D images, to detect camouflaged objects. The network has a "trident-branch" design, which means it has three parallel paths to extract and process different types of information: color, texture, and depth. By combining these three streams of data, the network can build a more comprehensive understanding of the 3D environment and identify camouflaged objects more accurately.
Additionally, the researchers recognized that some regions of the depth map may not effectively highlight the camouflaged object. To address this, they introduced a "depth-weighted cross-attention fusion module" that dynamically adjusts the importance of the depth and color information, depending on which one is more useful for detecting the camouflaged object in a particular scene.
The end result is a network that can leverage the power of 3D depth information to significantly outperform other state-of-the-art COD models. This research highlights the importance of considering the full 3D context when working on computer vision problems, rather than relying solely on 2D images.
Technical Explanation
The proposed depth-perception attention fusion network (DAF-Net) leverages depth maps as an auxiliary input to enhance the network's ability to perceive 3D information, which is typically challenging for 2D image-based COD models. The network uses a trident-branch encoder to extract chromatic, textural, and depth information, along with their cross-interactions.
Recognizing that certain regions of a depth map may not effectively highlight the camouflaged object, the researchers introduce a depth-weighted cross-attention fusion module. This module dynamically adjusts the fusion weights on depth and RGB feature maps, allowing the network to focus on the most informative spatial regions for detecting camouflaged objects.
To keep the model simple without compromising effectiveness, the researchers design a straightforward feature aggregation decoder that adaptively fuses the enhanced aggregated features. Experiments demonstrate the significant superiority of the proposed DAF-Net over other state-of-the-art COD methods, validating the contribution of depth information in this task.
The researchers make their code available at https://github.com/xinran-liu00/DAF-Net, allowing others to build upon their work.
Critical Analysis
The paper presents a compelling approach to incorporating depth information into COD models, addressing a notable shortcoming in the existing literature. By leveraging depth maps as an auxiliary input, the researchers have shown that the network can better perceive the 3D structure of the scene and more accurately detect camouflaged objects.
However, the paper does not discuss the potential limitations or challenges of this approach. For instance, it is unclear how the network would perform in scenarios where depth information is unavailable or unreliable, such as outdoor environments with varying lighting conditions or complex occlusions. Additionally, the paper does not explore the computational cost or inference speed of the proposed DAF-Net, which could be important considerations for real-world applications.
Further research could investigate the generalizability of the depth-perception attention fusion approach across different COD datasets and task variations, such as adaptive guidance learning for camouflaged object detection, concise but high-performing networks for image-guided tasks, or RGB-D fusion using CycleGAN for indoor scenes. Exploring the potential synergies between depth-based approaches and other state-of-the-art COD techniques, such as pyramid deep fusion networks for two-hand reconstruction, could also lead to further advancements in the field.
Conclusion
This paper presents a novel depth-perception attention fusion network (DAF-Net) that leverages depth maps as an auxiliary input to enhance the network's ability to perceive 3D information and detect camouflaged objects more accurately. By introducing a trident-branch encoder and a depth-weighted cross-attention fusion module, the researchers have demonstrated the significant contribution of depth information in COD tasks.
The proposed approach advances the state of the art in camouflaged object detection, highlighting the importance of considering the full 3D context when working on computer vision problems. The researchers' commitment to open-sourcing the code will likely spur further research and development in this important field, ultimately leading to more robust and reliable object detection systems that can operate in complex, real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌐
ZoomNeXt: A Unified Collaborative Pyramid Network for Camouflaged Object Detection
Youwei Pang, Xiaoqi Zhao, Tian-Zhu Xiang, Lihe Zhang, Huchuan Lu
0
0
Recent camouflaged object detection (COD) attempts to segment objects visually blended into their surroundings, which is extremely complex and difficult in real-world scenarios. Apart from the high intrinsic similarity between camouflaged objects and their background, objects are usually diverse in scale, fuzzy in appearance, and even severely occluded. To this end, we propose an effective unified collaborative pyramid network that mimics human behavior when observing vague images and videos, ie zooming in and out. Specifically, our approach employs the zooming strategy to learn discriminative mixed-scale semantics by the multi-head scale integration and rich granularity perception units, which are designed to fully explore imperceptible clues between candidate objects and background surroundings. The former's intrinsic multi-head aggregation provides more diverse visual patterns. The latter's routing mechanism can effectively propagate inter-frame differences in spatiotemporal scenarios and be adaptively deactivated and output all-zero results for static representations. They provide a solid foundation for realizing a unified architecture for static and dynamic COD. Moreover, considering the uncertainty and ambiguity derived from indistinguishable textures, we construct a simple yet effective regularization, uncertainty awareness loss, to encourage predictions with higher confidence in candidate regions. Our highly task-friendly framework consistently outperforms existing state-of-the-art methods in image and video COD benchmarks.
6/24/2024
Adaptive Guidance Learning for Camouflaged Object Detection
Zhennan Chen, Xuying Zhang, Tian-Zhu Xiang, Ying Tai
0
0
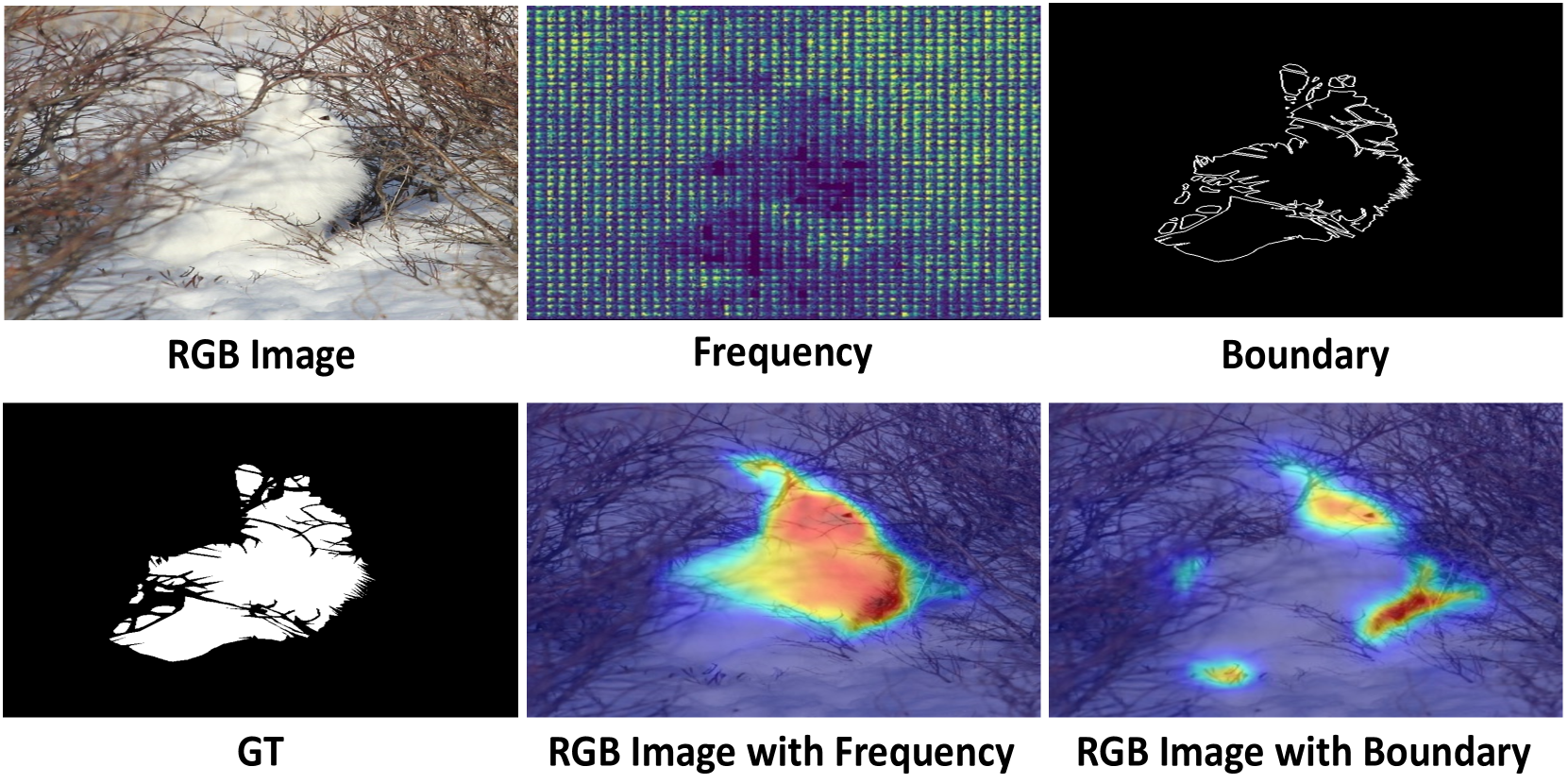
Camouflaged object detection (COD) aims to segment objects visually embedded in their surroundings, which is a very challenging task due to the high similarity between the objects and the background. To address it, most methods often incorporate additional information (e.g., boundary, texture, and frequency clues) to guide feature learning for better detecting camouflaged objects from the background. Although progress has been made, these methods are basically individually tailored to specific auxiliary cues, thus lacking adaptability and not consistently achieving high segmentation performance. To this end, this paper proposes an adaptive guidance learning network, dubbed textit{AGLNet}, which is a unified end-to-end learnable model for exploring and adapting different additional cues in CNN models to guide accurate camouflaged feature learning. Specifically, we first design a straightforward additional information generation (AIG) module to learn additional camouflaged object cues, which can be adapted for the exploration of effective camouflaged features. Then we present a hierarchical feature combination (HFC) module to deeply integrate additional cues and image features to guide camouflaged feature learning in a multi-level fusion manner.Followed by a recalibration decoder (RD), different features are further aggregated and refined for accurate object prediction. Extensive experiments on three widely used COD benchmark datasets demonstrate that the proposed method achieves significant performance improvements under different additional cues, and outperforms the recent 20 state-of-the-art methods by a large margin. Our code will be made publicly available at: textcolor{blue}{{https://github.com/ZNan-Chen/AGLNet}}.
5/8/2024

Enhanced Automotive Object Detection via RGB-D Fusion in a DiffusionDet Framework
Eliraz Orfaig, Inna Stainvas, Igal Bilik
0
0
Vision-based autonomous driving requires reliable and efficient object detection. This work proposes a DiffusionDet-based framework that exploits data fusion from the monocular camera and depth sensor to provide the RGB and depth (RGB-D) data. Within this framework, ground truth bounding boxes are randomly reshaped as part of the training phase, allowing the model to learn the reverse diffusion process of noise addition. The system methodically enhances a randomly generated set of boxes at the inference stage, guiding them toward accurate final detections. By integrating the textural and color features from RGB images with the spatial depth information from the LiDAR sensors, the proposed framework employs a feature fusion that substantially enhances object detection of automotive targets. The $2.3$ AP gain in detecting automotive targets is achieved through comprehensive experiments using the KITTI dataset. Specifically, the improved performance of the proposed approach in detecting small objects is demonstrated.
6/6/2024
🔎
Salient Object Detection in RGB-D Videos
Ao Mou, Yukang Lu, Jiahao He, Dingyao Min, Keren Fu, Qijun Zhao
0
0
Given the widespread adoption of depth-sensing acquisition devices, RGB-D videos and related data/media have gained considerable traction in various aspects of daily life. Consequently, conducting salient object detection (SOD) in RGB-D videos presents a highly promising and evolving avenue. Despite the potential of this area, SOD in RGB-D videos remains somewhat under-explored, with RGB-D SOD and video SOD (VSOD) traditionally studied in isolation. To explore this emerging field, this paper makes two primary contributions: the dataset and the model. On one front, we construct the RDVS dataset, a new RGB-D VSOD dataset with realistic depth and characterized by its diversity of scenes and rigorous frame-by-frame annotations. We validate the dataset through comprehensive attribute and object-oriented analyses, and provide training and testing splits. Moreover, we introduce DCTNet+, a three-stream network tailored for RGB-D VSOD, with an emphasis on RGB modality and treats depth and optical flow as auxiliary modalities. In pursuit of effective feature enhancement, refinement, and fusion for precise final prediction, we propose two modules: the multi-modal attention module (MAM) and the refinement fusion module (RFM). To enhance interaction and fusion within RFM, we design a universal interaction module (UIM) and then integrate holistic multi-modal attentive paths (HMAPs) for refining multi-modal low-level features before reaching RFMs. Comprehensive experiments, conducted on pseudo RGB-D video datasets alongside our RDVS, highlight the superiority of DCTNet+ over 17 VSOD models and 14 RGB-D SOD models. Ablation experiments were performed on both pseudo and realistic RGB-D video datasets to demonstrate the advantages of individual modules as well as the necessity of introducing realistic depth. Our code together with RDVS dataset will be available at https://github.com/kerenfu/RDVS/.
5/22/2024