Design and Control of a Compact Series Elastic Actuator Module for Robots in MRI Scanners
2406.07670
0
0
🏋️
Abstract
In this study, we introduce a novel MRI-compatible rotary series elastic actuator module utilizing velocity-sourced ultrasonic motors for force-controlled robots operating within MRI scanners. Unlike previous MRI-compatible SEA designs, our module incorporates a transmission force sensing series elastic actuator structure, with four off-the-shelf compression springs strategically placed between the gearbox housing and the motor housing. This design features a compact size, thus expanding possibilities for a wider range of MRI robotic applications. To achieve precise torque control, we develop a controller that incorporates a disturbance observer tailored for velocity-sourced motors. This controller enhances the robustness of torque control in our actuator module, even in the presence of varying external impedance, thereby augmenting its suitability for MRI-guided medical interventions. Experimental validation demonstrates the actuator's torque control performance in both 3 Tesla MRI and non-MRI environments, achieving a settling time of 0.1 seconds and a steady-state error within 2% of its maximum output torque. Notably, our force controller exhibits consistent performance across low and high external impedance scenarios, in contrast to conventional controllers for velocity-sourced series elastic actuators, which struggle with steady-state performance under low external impedance conditions.
Create account to get full access
Overview
- Introduces a novel MRI-compatible rotary series elastic actuator (SEA) module
- Utilizes velocity-sourced ultrasonic motors for force-controlled robots operating within MRI scanners
- Incorporates a transmission force sensing SEA structure with strategically placed compression springs
- Develops a disturbance observer-based controller for precise torque control, even with varying external impedance
- Demonstrates the actuator's torque control performance in both MRI and non-MRI environments
Plain English Explanation
This study presents a new type of robotic actuator, or "muscle," that can be used inside MRI (magnetic resonance imaging) machines. Unlike previous designs, this actuator has a special structure that allows it to precisely control the force it applies, even in the challenging environment of an MRI scanner.
The key innovation is the use of a series of springs between the motor and the output, which act as a "shock absorber." This allows the actuator to sense the forces it's applying and adjust accordingly, much like the suspension in a car. The researchers also developed a specialized control system that helps the actuator maintain precise force control, even when the external conditions (like the object it's interacting with) are changing.
The result is an actuator that can operate reliably and accurately inside an MRI machine, which is important for medical robotics applications like guided medical interventions. This allows doctors to use robots to assist with procedures while having real-time imaging feedback from the MRI scanner.
Technical Explanation
The researchers introduce a novel MRI-compatible rotary series elastic actuator (SEA) module that uses velocity-sourced ultrasonic motors. Unlike previous MRI-compatible SEA designs, this module incorporates a transmission force sensing SEA structure, with four off-the-shelf compression springs strategically placed between the gearbox housing and the motor housing.
This compact design expands the possibilities for a wider range of MRI robotic applications, compared to earlier bulkier actuators. To achieve precise torque control, the researchers develop a controller that incorporates a disturbance observer tailored for velocity-sourced motors. This controller enhances the robustness of torque control in the actuator module, even in the presence of varying external impedance, thereby improving its suitability for MRI-guided medical interventions.
Experimental validation demonstrates the actuator's torque control performance in both 3 Tesla MRI and non-MRI environments, achieving a settling time of 0.1 seconds and a steady-state error within 2% of its maximum output torque. Notably, the force controller exhibits consistent performance across low and high external impedance scenarios, in contrast to conventional controllers for velocity-sourced SEAs, which struggle with steady-state performance under low external impedance conditions.
Critical Analysis
The paper presents a well-designed and thoroughly tested solution for a important problem in the field of medical robotics. The use of a series elastic structure and the disturbance observer-based controller seem to effectively address the challenges of precise force control in the MRI environment.
However, the paper does not discuss any potential limitations or caveats of the proposed actuator module. For example, it would be useful to know the range of torque and speed capabilities, the maximum allowable external forces, and the impact of the actuator's size and weight on the overall robot design.
Additionally, the researchers could have compared their solution to other MRI-compatible actuator designs or force control strategies to better contextualize the novelty and advantages of their approach.
Overall, the research appears to be a valuable contribution to the field, but there is room for a more comprehensive discussion of the actuator's capabilities, limitations, and potential tradeoffs.
Conclusion
This study introduces a novel MRI-compatible rotary series elastic actuator module that leverages velocity-sourced ultrasonic motors and a specialized control system to achieve precise force control in the challenging MRI environment. The compact, spring-based design and the disturbance observer-based controller enable the actuator to maintain consistent performance across a range of external impedance conditions, making it well-suited for MRI-guided medical interventions.
The demonstrated torque control capabilities of this actuator module represent an important step forward in the development of advanced medical robotics that can operate safely and effectively within MRI scanners. As the field continues to evolve, this research could inspire further innovations in MRI-compatible actuation and control systems, ultimately leading to improved patient care and outcomes.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

A novel seamless magnetic-based actuating mechanism for end-effector-based robotic rehabilitation platforms
Sima Ghafoori, Ali Rabiee, Musa Jouaneh, Reza Abiri
0
0
In this pioneering study, we unveiled a groundbreaking approach for actuating rehabilitation robots through the innovative use of magnetic technology as a seamless haptic force generator, offering a leap forward in enhancing user interface and experience, particularly in end-effector-based robots for upper-limb extremity motor rehabilitation. We employed the Extended Kalman Filter to meticulously analyze and formalize the robotic system's nonlinear dynamics, showcasing the potential of this sophisticated algorithm in accurately tracking and compensating for disturbances, thereby ensuring seamless and effective motor training. The proposed planar robotic system embedded with magnetic technology was evaluated with the recruitment of human subjects. We reached a minimum RMS value of 0.2 and a maximum of 2.06 in our estimations, indicating our algorithm's capability for tracking the system behavior. Overall, the results showed significant improvement in smoothness, comfort, and safety during execution and motor training. The proposed novel magnetic actuation and advanced algorithmic control opens new horizons for the development of more efficient and user-friendly rehabilitation technologies.
4/3/2024
🤷
A Passive Variable Impedance Control Strategy with Viscoelastic Parameters Estimation of Soft Tissues for Safe Ultrasonography
Luca Beber (Department of Industrial Engineering, Universit`a di Trento, Trento, Italy), Edoardo Lamon (Department of Information Engineering and Computer Science, Universit`a di Trento, Trento, Italy, Human-Robot Interfaces and Interaction, Istituto Italiano di Tecnologia, Genoa, Italy), Davide Nardi (Department of Information Engineering and Computer Science, Universit`a di Trento, Trento, Italy), Daniele Fontanelli (Department of Industrial Engineering, Universit`a di Trento, Trento, Italy), Matteo Saveriano (Department of Industrial Engineering, Universit`a di Trento, Trento, Italy), Luigi Palopoli (Department of Information Engineering and Computer Science, Universit`a di Trento, Trento, Italy)
0
0
In the context of telehealth, robotic approaches have proven a valuable solution to in-person visits in remote areas, with decreased costs for patients and infection risks. In particular, in ultrasonography, robots have the potential to reproduce the skills required to acquire high-quality images while reducing the sonographer's physical efforts. In this paper, we address the control of the interaction of the probe with the patient's body, a critical aspect of ensuring safe and effective ultrasonography. We introduce a novel approach based on variable impedance control, allowing real-time optimisation of a compliant controller parameters during ultrasound procedures. This optimisation is formulated as a quadratic programming problem and incorporates physical constraints derived from viscoelastic parameter estimations. Safety and passivity constraints, including an energy tank, are also integrated to minimise potential risks during human-robot interaction. The proposed method's efficacy is demonstrated through experiments on a patient dummy torso, highlighting its potential for achieving safe behaviour and accurate force control during ultrasound procedures, even in cases of contact loss.
4/16/2024
Optimized Design of a Soft Actuator Considering Force/Torque, Bendability, and Controllability via an Approximated Structure
Wu-Te Yang, Burak Kurkcu, Masayoshi Tomizuka
0
0
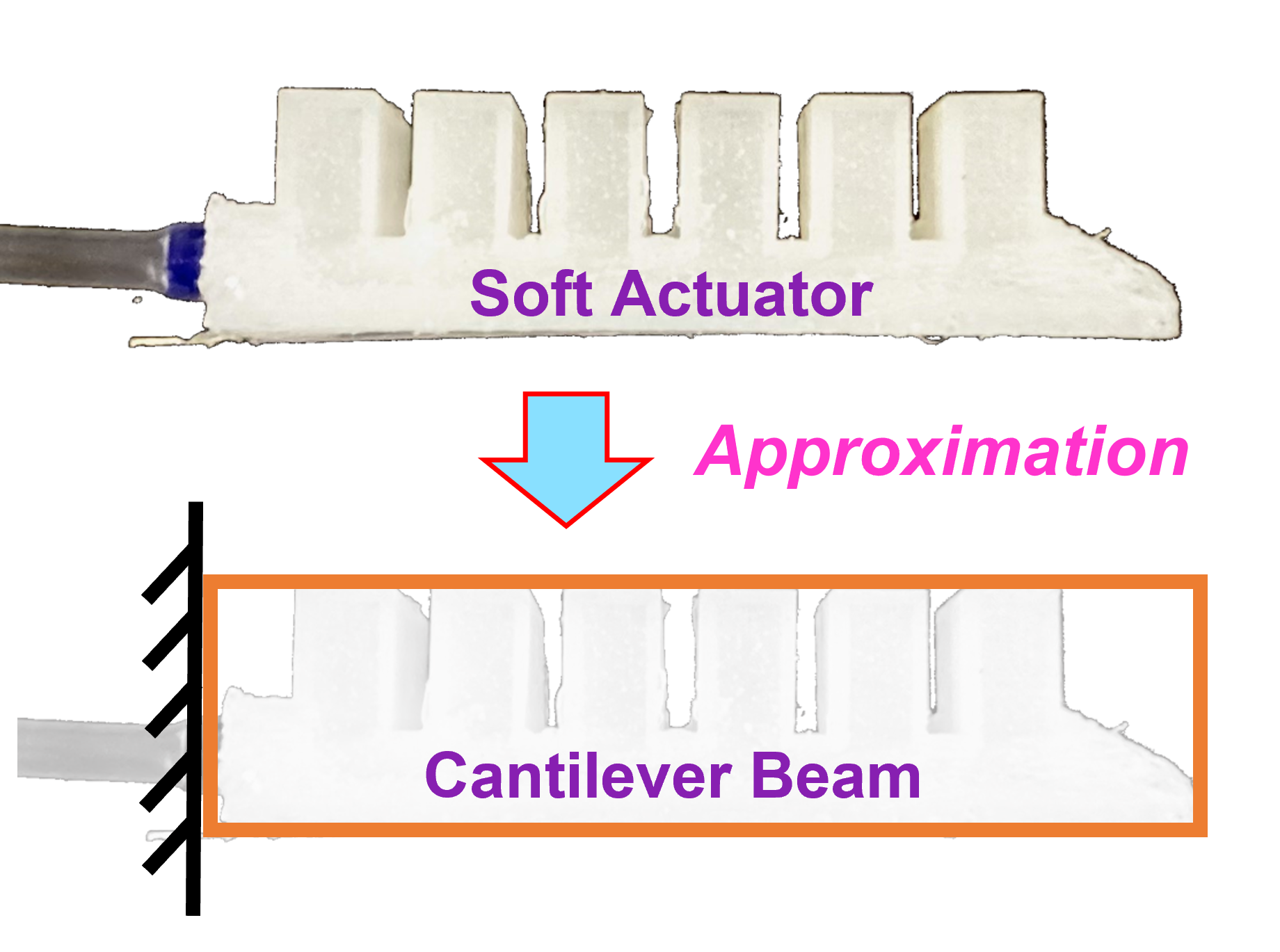
This paper introduces a novel design method that enhances the force/torque, bendability, and controllability of soft pneumatic actuators (SPAs). The complex structure of the soft actuator is simplified by approximating it as a cantilever beam. This allows us to derive approximated nonlinear kinematic models and a dynamical model, which is explored to understand the correlation between natural frequency and dimensional parameters of SPA. The design problem is then transformed into an optimization problem, using kinematic equations as the objective function and the dynamical equation as a constraint. By solving this optimization problem, the optimal dimensional parameters are determined. Six prototypes are manufactured to validate the proposed approach. The optimal actuator successfully generates the desired force/torque and bending angle, while its natural frequency remains within the constrained range. This work highlights the potential of using optimization formulation and approximated nonlinear models to boost the performance and dynamical properties of soft pneumatic actuators.
4/16/2024
🤷
Design, modeling, and characteristics of ringshaped robot actuated by functional fluid
Zebing Mao, Xuehang Bai, Yanhong Peng, Yayi Shen
0
0
The controlled actuation of hydraulic and pneumatic actuators has unveiled fresh and thrilling opportunities for designing mobile robots with adaptable structures. Previously reported rolling robots, which were powered by fluidic systems, often relied on complex principles, cumbersome pump and valve systems, and intricate control strategies, limiting their applicability in other fields. In this investigation, we employed a distinct category of functional fluid identified as Electrohydrodynamic (EHD) fluid, serving as the pivotal element within the ring-shaped actuator. A short stream of functional fluid is placed within a fluidic channel and is then actuated by applying a direct current voltage aiming at shifting the center of mass of the robot and finally pushed the actuator to roll. We designed a ring-shaped fluidic robot, manufactured it using digital machining methods, and evaluated the robot's characteristics. Furthermore, we developed static and dynamic models to analyze the oscillation and rolling motion of the ring-shaped robots using the Lagrange method. This study is anticipated to contribute to the expansion of current research on EHD flexible actuators, enabling the realization of complex robotic systems.
6/13/2024