Designing Stable Neural Networks using Convex Analysis and ODEs

0
Sign in to get full access
Overview
- Presents a novel approach for designing stable neural networks using convex analysis and ordinary differential equations (ODEs)
- Aims to address the challenge of designing neural networks that are robust and reliable, especially in safety-critical applications
- Proposes a method to ensure the stability of the neural network's dynamics, which is crucial for real-world deployment
Plain English Explanation
The paper discusses a new way to design stable and reliable neural networks, which are a type of machine learning model. Neural networks are widely used in various applications, but ensuring their stability and reliability can be challenging, especially in safety-critical areas like self-driving cars or medical devices.
The researchers in this paper propose a method that uses convex analysis and ordinary differential equations (ODEs) to design neural networks that are inherently stable. This means the neural network's behavior and outputs will remain consistent and predictable, even when faced with small changes in the input data.
By ensuring the stability of the neural network's dynamics, the researchers aim to make these models more robust and reliable for real-world applications where safety and trustworthiness are crucial. This approach could be particularly useful in complex systems or high-dimensional problems where neural networks are commonly used.
Technical Explanation
The paper presents a novel method for designing stable neural networks using tools from convex analysis and ordinary differential equations (ODEs). The key idea is to formulate the neural network as a dynamical system described by an ODE and then use convex analysis to ensure the stability of this dynamical system.
The authors first show how to represent a neural network as an ODE system, where the network's weights and biases are the state variables. They then derive conditions on the network's architecture and activation functions that guarantee the stability of the ODE system, ensuring the neural network's outputs remain consistent and predictable.
The proposed approach allows the researchers to provably control the sensitivity of the neural network to changes in the input data. This is crucial for real-world applications where reliable and trustworthy behavior is required, such as in safety-critical systems.
The authors demonstrate the effectiveness of their method through several numerical experiments, showcasing the stability and robustness of the designed neural networks compared to standard architectures.
Critical Analysis
The paper presents a promising approach for designing stable neural networks, which is an important problem in the field of machine learning, especially for safety-critical applications. The use of convex analysis and ODEs to ensure the stability of the neural network's dynamics is a novel and theoretically-grounded technique.
One potential limitation of the approach is the restrictive assumptions on the neural network architecture and activation functions required to guarantee stability. While the authors show that their method can be applied to various network types, the conditions may limit the flexibility and expressiveness of the designed models. Further research could explore ways to relax these assumptions without sacrificing the stability guarantees.
Additionally, the paper focuses on the theoretical aspects and numerical experiments, but does not delve into the practical implications and real-world deployment challenges. Future work could investigate how this approach performs in complex, high-dimensional real-world tasks and explore ways to integrate it with existing neural network training and deployment frameworks.
Overall, the paper makes a valuable contribution to the field of stable and reliable neural network design, and the proposed method could have significant impact in safety-critical domains where trustworthy machine learning is of paramount importance.
Conclusion
This paper presents a novel approach for designing stable neural networks using tools from convex analysis and ordinary differential equations. The key idea is to formulate the neural network as a dynamical system and then leverage convex analysis to ensure the stability of this dynamical system, thereby guaranteeing the consistency and predictability of the network's outputs.
The proposed method allows for the provable control of the sensitivity of the neural network to changes in the input data, which is crucial for real-world applications where reliable and trustworthy behavior is required, such as in safety-critical systems. The authors demonstrate the effectiveness of their approach through numerical experiments, showcasing the stability and robustness of the designed neural networks.
While the paper focuses on the theoretical aspects and assumes certain restrictions on the neural network architecture and activation functions, the presented technique represents an important step towards the development of more stable and reliable machine learning models, with potential applications in complex, high-dimensional systems and safety-critical domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Designing Stable Neural Networks using Convex Analysis and ODEs
Ferdia Sherry, Elena Celledoni, Matthias J. Ehrhardt, Davide Murari, Brynjulf Owren, Carola-Bibiane Schonlieb
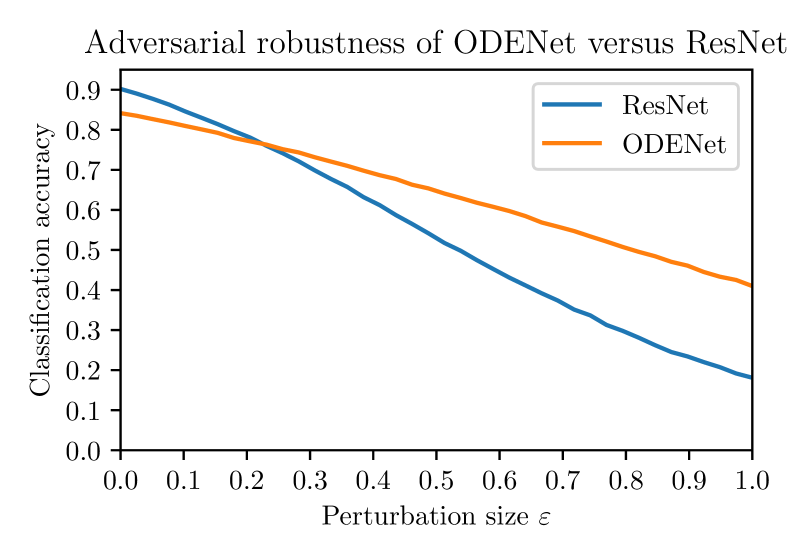
Motivated by classical work on the numerical integration of ordinary differential equations we present a ResNet-styled neural network architecture that encodes non-expansive (1-Lipschitz) operators, as long as the spectral norms of the weights are appropriately constrained. This is to be contrasted with the ordinary ResNet architecture which, even if the spectral norms of the weights are constrained, has a Lipschitz constant that, in the worst case, grows exponentially with the depth of the network. Further analysis of the proposed architecture shows that the spectral norms of the weights can be further constrained to ensure that the network is an averaged operator, making it a natural candidate for a learned denoiser in Plug-and-Play algorithms. Using a novel adaptive way of enforcing the spectral norm constraints, we show that, even with these constraints, it is possible to train performant networks. The proposed architecture is applied to the problem of adversarially robust image classification, to image denoising, and finally to the inverse problem of deblurring.
Read more4/19/2024
🤿
0
Implicit regularization of deep residual networks towards neural ODEs
Pierre Marion, Yu-Han Wu, Michael E. Sander, G'erard Biau
Residual neural networks are state-of-the-art deep learning models. Their continuous-depth analog, neural ordinary differential equations (ODEs), are also widely used. Despite their success, the link between the discrete and continuous models still lacks a solid mathematical foundation. In this article, we take a step in this direction by establishing an implicit regularization of deep residual networks towards neural ODEs, for nonlinear networks trained with gradient flow. We prove that if the network is initialized as a discretization of a neural ODE, then such a discretization holds throughout training. Our results are valid for a finite training time, and also as the training time tends to infinity provided that the network satisfies a Polyak-Lojasiewicz condition. Importantly, this condition holds for a family of residual networks where the residuals are two-layer perceptrons with an overparameterization in width that is only linear, and implies the convergence of gradient flow to a global minimum. Numerical experiments illustrate our results.
Read more7/8/2024

0
Stable Weight Updating: A Key to Reliable PDE Solutions Using Deep Learning
A. Noorizadegan, R. Cavoretto, D. L. Young, C. S. Chen
Background: Deep learning techniques, particularly neural networks, have revolutionized computational physics, offering powerful tools for solving complex partial differential equations (PDEs). However, ensuring stability and efficiency remains a challenge, especially in scenarios involving nonlinear and time-dependent equations. Methodology: This paper introduces novel residual-based architectures, namely the Simple Highway Network and the Squared Residual Network, designed to enhance stability and accuracy in physics-informed neural networks (PINNs). These architectures augment traditional neural networks by incorporating residual connections, which facilitate smoother weight updates and improve backpropagation efficiency. Results: Through extensive numerical experiments across various examples including linear and nonlinear, time-dependent and independent PDEs we demonstrate the efficacy of the proposed architectures. The Squared Residual Network, in particular, exhibits robust performance, achieving enhanced stability and accuracy compared to conventional neural networks. These findings underscore the potential of residual-based architectures in advancing deep learning for PDEs and computational physics applications.
Read more7/11/2024

0
Controlled Learning of Pointwise Nonlinearities in Neural-Network-Like Architectures
Michael Unser, Alexis Goujon, Stanislas Ducotterd
We present a general variational framework for the training of freeform nonlinearities in layered computational architectures subject to some slope constraints. The regularization that we add to the traditional training loss penalizes the second-order total variation of each trainable activation. The slope constraints allow us to impose properties such as 1-Lipschitz stability, firm non-expansiveness, and monotonicity/invertibility. These properties are crucial to ensure the proper functioning of certain classes of signal-processing algorithms (e.g., plug-and-play schemes, unrolled proximal gradient, invertible flows). We prove that the global optimum of the stated constrained-optimization problem is achieved with nonlinearities that are adaptive nonuniform linear splines. We then show how to solve the resulting function-optimization problem numerically by representing the nonlinearities in a suitable (nonuniform) B-spline basis. Finally, we illustrate the use of our framework with the data-driven design of (weakly) convex regularizers for the denoising of images and the resolution of inverse problems.
Read more8/26/2024