Detection and tracking of MAVs using a LiDAR with rosette scanning pattern

0

Sign in to get full access
Overview
- The paper presents a method for detecting and tracking Micro Aerial Vehicles (MAVs) using a LiDAR with a rosette scanning pattern.
- The proposed approach combines a CNN-based object detector with a Kalman filter-based tracker to accurately identify and follow MAVs in real-time.
- Experiments on real-world datasets demonstrate the effectiveness of the system in challenging environments.
Plain English Explanation
The paper describes a system that uses a special type of laser-based sensor called a LiDAR to detect and track small flying vehicles known as Micro Aerial Vehicles (MAVs). The LiDAR scans the environment in a unique "rosette" pattern, which helps it capture detailed information about nearby objects.
The detection and tracking process works as follows:
- The system first uses a Convolutional Neural Network (CNN) to analyze the LiDAR data and identify any potential MAVs. CNNs are a type of machine learning model that excel at recognizing patterns in visual information.
- Once a MAV is detected, a Kalman filter is used to track its movement over time. A Kalman filter is a mathematical algorithm that can predict the future state of a dynamic system, like the position and velocity of a flying object.
By combining these two techniques - CNN-based detection and Kalman filter-based tracking - the system is able to accurately identify and follow MAVs, even in challenging real-world environments with lots of other objects and obstacles present.
Technical Explanation
The paper proposes a method for detecting and tracking MAVs using a LiDAR with a rosette scanning pattern. The LiDAR sensor used in the system scans the environment in a unique rosette pattern, which provides high-resolution 3D point cloud data.
A Convolutional Neural Network (CNN) is used as the object detector. The CNN takes the LiDAR point cloud as input and outputs bounding boxes around any detected MAVs. This CNN-based detector was trained on a dataset of real-world MAV flights.
To track the detected MAVs over time, the system employs a Kalman filter. The Kalman filter uses the sequence of bounding boxes for each MAV to estimate its current state (position, velocity, etc.) and predict its future motion. This allows the system to maintain robust tracking even when MAVs are occluded or temporarily lost from view.
The authors evaluate their approach on several real-world datasets of MAV flights, demonstrating its effectiveness in challenging scenarios with multiple MAVs, background clutter, and other obstacles. The system achieves high detection and tracking accuracy compared to baseline methods.
Critical Analysis
The paper presents a novel and promising approach for MAV detection and tracking using a specialized LiDAR sensor. The authors carefully design and evaluate their system, demonstrating its effectiveness on real-world data.
However, the paper does not address some potential limitations or areas for further research. For example, the system's performance may degrade in scenarios with very dense MAV traffic or extreme environmental conditions (e.g., heavy rain or fog) that could interfere with the LiDAR's operation.
Additionally, the paper does not provide much insight into the computational efficiency of the proposed approach. The real-time performance and resource requirements of the system are important practical considerations, especially for potential deployment on resource-constrained platforms like small drones or autonomous vehicles.
Further research could explore ways to improve the system's robustness, scalability, and efficiency, making it more suitable for a wider range of real-world applications. Integrating the LiDAR-based detection and tracking with other sensor modalities, such as cameras or radar, could also be a fruitful area of investigation.
Conclusion
The paper presents a novel approach for detecting and tracking Micro Aerial Vehicles (MAVs) using a LiDAR sensor with a rosette scanning pattern. The system combines a Convolutional Neural Network-based object detector and a Kalman filter-based tracker to accurately identify and follow MAVs in real-time, even in challenging real-world environments.
The authors demonstrate the effectiveness of their approach through extensive experiments on real-world datasets, highlighting the potential of LiDAR-based perception for applications involving small flying vehicles. While the paper identifies some promising directions, further research is needed to address the system's limitations and improve its robustness and efficiency for practical deployment.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Detection and tracking of MAVs using a LiDAR with rosette scanning pattern
S'andor Gazdag, Tom Moller, Tam'as Filep, Anita Keszler, Andr'as L. Majdik
The usage of commercial Micro Aerial Vehicles (MAVs) has increased drastically during the last decade. While the added value of MAVs to society is apparent, their growing use is also coming with increasing risks like violating public airspace at airports or committing privacy violations. To mitigate these issues it is becoming critical to develop solutions that incorporate the detection and tracking of MAVs with autonomous systems. This work presents a method for the detection and tracking of MAVs using a novel, low-cost rosette scanning LiDAR on a pan-tilt turret. Once the static background is captured, a particle filter is utilized to detect a possible target and track its position with a physical, programmable pan-tilt system. The tracking makes it possible to keep the MAV in the center, maximizing the density of 3D points measured on the target by the LiDAR sensor. The developed algorithm was evaluated within the indoor MIcro aerial vehicle and MOtion capture (MIMO) arena and has state-of-the-art tracking accuracy, stability, and fast re-detection time in case of tracking loss. Based on the outdoor tests, it was possible to significantly increase the detection distance and number of returned points compared to other similar methods using LiDAR.
Read more8/19/2024
🔎
0
On Onboard LiDAR-based Flying Object Detection
Matouv{s} Vrba, Viktor Walter, V'aclav Pritzl, Michal Pliska, Tom'av{s} B'av{c}a, Vojtv{e}ch Spurn'y, Daniel Hev{r}t, Martin Saska
A new robust and accurate approach for the detection and localization of flying objects with the purpose of highly dynamic aerial interception and agile multi-robot interaction is presented in this paper. The approach is proposed for use onboard an autonomous aerial vehicle equipped with a 3D LiDAR sensor providing input data for the algorithm. It relies on a novel 3D occupancy voxel mapping method for the target detection and a cluster-based multiple hypothesis tracker to compensate uncertainty of the sensory data. When compared to state-of-the-art methods of onboard detection of other flying objects, the presented approach provides superior localization accuracy and robustness to different environments and appearance changes of the target, as well as a greater detection range. Furthermore, in combination with the proposed multi-target tracker, sporadic false positives are suppressed, state estimation of the target is provided and the detection latency is negligible. This makes the detector suitable for tasks of agile multi-robot interaction, such as autonomous aerial interception or formation control where precise, robust, and fast relative localization of other robots is crucial. We demonstrate the practical usability and performance of the system in simulated and real-world experiments.
Read more7/12/2024

0
Clustering-based Learning for UAV Tracking and Pose Estimation
Jiaping Xiao, Phumrapee Pisutsin, Cheng Wen Tsao, Mir Feroskhan
UAV tracking and pose estimation plays an imperative role in various UAV-related missions, such as formation control and anti-UAV measures. Accurately detecting and tracking UAVs in a 3D space remains a particularly challenging problem, as it requires extracting sparse features of micro UAVs from different flight environments and continuously matching correspondences, especially during agile flight. Generally, cameras and LiDARs are the two main types of sensors used to capture UAV trajectories in flight. However, both sensors have limitations in UAV classification and pose estimation. This technical report briefly introduces the method proposed by our team NTU-ICG for the CVPR 2024 UG2+ Challenge Track 5. This work develops a clustering-based learning detection approach, CL-Det, for UAV tracking and pose estimation using two types of LiDARs, namely Livox Avia and LiDAR 360. We combine the information from the two data sources to locate drones in 3D. We first align the timestamps of Livox Avia data and LiDAR 360 data and then separate the point cloud of objects of interest (OOIs) from the environment. The point cloud of OOIs is clustered using the DBSCAN method, with the midpoint of the largest cluster assumed to be the UAV position. Furthermore, we utilize historical estimations to fill in missing data. The proposed method shows competitive pose estimation performance and ranks 5th on the final leaderboard of the CVPR 2024 UG2+ Challenge.
Read more5/28/2024
0
Developing Smart MAVs for Autonomous Inspection in GPS-denied Constructions
Paoqiang Pan, Kewei Hu, Xiao Huang, Wei Ying, Xiaoxuan Xie, Yue Ma, Naizhong Zhang, Hanwen Kang
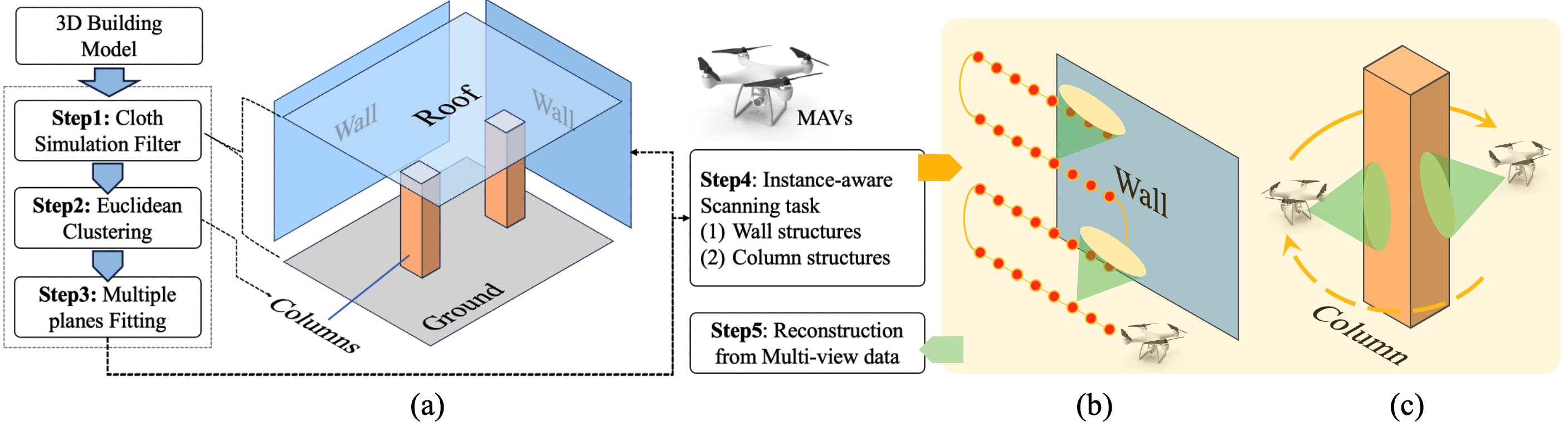
Smart Micro Aerial Vehicles (MAVs) have transformed infrastructure inspection by enabling efficient, high-resolution monitoring at various stages of construction, including hard-to-reach areas. Traditional manual operation of drones in GPS-denied environments, such as industrial facilities and infrastructure, is labour-intensive, tedious and prone to error. This study presents an innovative framework for smart MAV inspections in such complex and GPS-denied indoor environments. The framework features a hierarchical perception and planning system that identifies regions of interest and optimises task paths. It also presents an advanced MAV system with enhanced localisation and motion planning capabilities, integrated with Neural Reconstruction technology for comprehensive 3D reconstruction of building structures. The effectiveness of the framework was empirically validated in a 4,000 square meters indoor infrastructure facility with an interior length of 80 metres, a width of 50 metres and a height of 7 metres. The main structure consists of columns and walls. Experimental results show that our MAV system performs exceptionally well in autonomous inspection tasks, achieving a 100% success rate in generating and executing scan paths. Extensive experiments validate the manoeuvrability of our developed MAV, achieving a 100% success rate in motion planning with a tracking error of less than 0.1 metres. In addition, the enhanced reconstruction method using 3D Gaussian Splatting technology enables the generation of high-fidelity rendering models from the acquired data. Overall, our novel method represents a significant advancement in the use of robotics for infrastructure inspection.
Read more8/13/2024