DextrAH-G: Pixels-to-Action Dexterous Arm-Hand Grasping with Geometric Fabrics

0
📶
Sign in to get full access
Overview
- Provides formatting instructions for the Conference on Robot Learning (CoRL) 2024 paper submissions.
- Covers key aspects such as citations, experimental results, and layout requirements.
- Aims to ensure a consistent, high-quality presentation of research at the conference.
Plain English Explanation
The provided paper outlines the formatting guidelines for submitting research papers to the CoRL 2024 conference. These instructions are designed to help researchers present their work in a clear and consistent manner, making it easier for readers to understand and evaluate the research.
The paper discusses the proper way to cite references within the text, as well as the required formatting for the reference list. It also provides guidance on how to present experimental results, ensuring that the data is displayed in a visually appealing and informative way.
By following these guidelines, researchers can ensure that their work is formatted correctly and aligns with the conference's standards, ultimately improving the overall quality and readability of the published papers.
Technical Explanation
The paper provides detailed instructions for formatting research papers to be submitted to the CoRL 2024 conference. It covers various aspects of the paper layout, including guidelines for citing references and presenting experimental results.
The citations section outlines the proper way to reference previous work within the text, as well as the required formatting for the reference list. This ensures consistency and makes it easier for readers to track down the cited sources.
The experimental results section provides guidance on how to effectively display data and findings, such as the use of tables, figures, and captions. This helps to convey the research outcomes in a clear and visually appealing manner.
By adhering to these formatting instructions, researchers can enhance the overall quality and readability of their submissions, ultimately contributing to the success of the CoRL 2024 conference.
Critical Analysis
The paper provides a comprehensive set of formatting guidelines that are likely to be well-received by the CoRL 2024 community. The instructions are detailed and cover the key aspects of paper presentation, such as citations and experimental results.
However, the paper does not address potential limitations or caveats that researchers may encounter when following these guidelines. For example, it does not discuss how to handle complex or unconventional data visualizations, or provide guidance on dealing with edge cases in citation formatting.
Additionally, the paper could benefit from including more examples or sample layouts to help researchers better understand the expected formatting. This could make the instructions more accessible and easier to implement.
Overall, the formatting instructions are well-designed and likely to contribute to the overall quality and consistency of the CoRL 2024 paper submissions. However, some additional considerations and examples could further improve the usefulness of the guidelines.
Conclusion
The formatting instructions provided in this paper are an essential resource for researchers planning to submit their work to the CoRL 2024 conference. By outlining the proper formatting for citations, experimental results, and other key elements, the instructions help ensure a consistent and high-quality presentation of research across all submissions.
Adhering to these guidelines will not only make the papers more readable and visually appealing, but it will also enhance the overall impact and influence of the research presented at the conference. By following these instructions, researchers can contribute to the success of CoRL 2024 and further the advancement of the field of robotics and machine learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📶
0
DextrAH-G: Pixels-to-Action Dexterous Arm-Hand Grasping with Geometric Fabrics
Tyler Ga Wei Lum, Martin Matak, Viktor Makoviychuk, Ankur Handa, Arthur Allshire, Tucker Hermans, Nathan D. Ratliff, Karl Van Wyk
A pivotal challenge in robotics is achieving fast, safe, and robust dexterous grasping across a diverse range of objects, an important goal within industrial applications. However, existing methods often have very limited speed, dexterity, and generality, along with limited or no hardware safety guarantees. In this work, we introduce DextrAH-G, a depth-based dexterous grasping policy trained entirely in simulation that combines reinforcement learning, geometric fabrics, and teacher-student distillation. We address key challenges in joint arm-hand policy learning, such as high-dimensional observation and action spaces, the sim2real gap, collision avoidance, and hardware constraints. DextrAH-G enables a 23 motor arm-hand robot to safely and continuously grasp and transport a large variety of objects at high speed using multi-modal inputs including depth images, allowing generalization across object geometry. Videos at https://sites.google.com/view/dextrah-g.
Read more7/8/2024
0
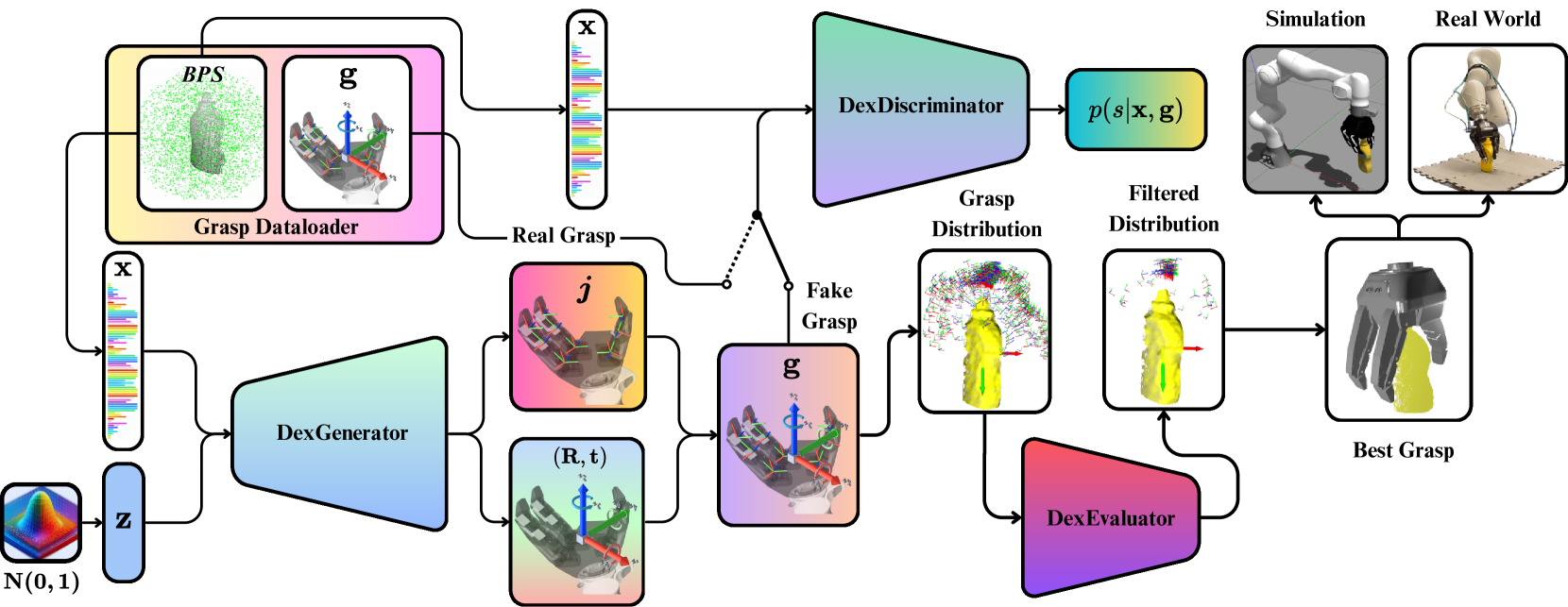
DexGANGrasp: Dexterous Generative Adversarial Grasping Synthesis for Task-Oriented Manipulation
Qian Feng, David S. Martinez Lema, Mohammadhossein Malmir, Hang Li, Jianxiang Feng, Zhaopeng Chen, Alois Knoll
We introduce DexGanGrasp, a dexterous grasping synthesis method that generates and evaluates grasps with single view in real time. DexGanGrasp comprises a Conditional Generative Adversarial Networks (cGANs)-based DexGenerator to generate dexterous grasps and a discriminator-like DexEvalautor to assess the stability of these grasps. Extensive simulation and real-world expriments showcases the effectiveness of our proposed method, outperforming the baseline FFHNet with an 18.57% higher success rate in real-world evaluation. We further extend DexGanGrasp to DexAfford-Prompt, an open-vocabulary affordance grounding pipeline for dexterous grasping leveraging Multimodal Large Language Models (MLLMs) and Vision Language Models (VLMs), to achieve task-oriented grasping with successful real-world deployments.
Read more7/25/2024
0
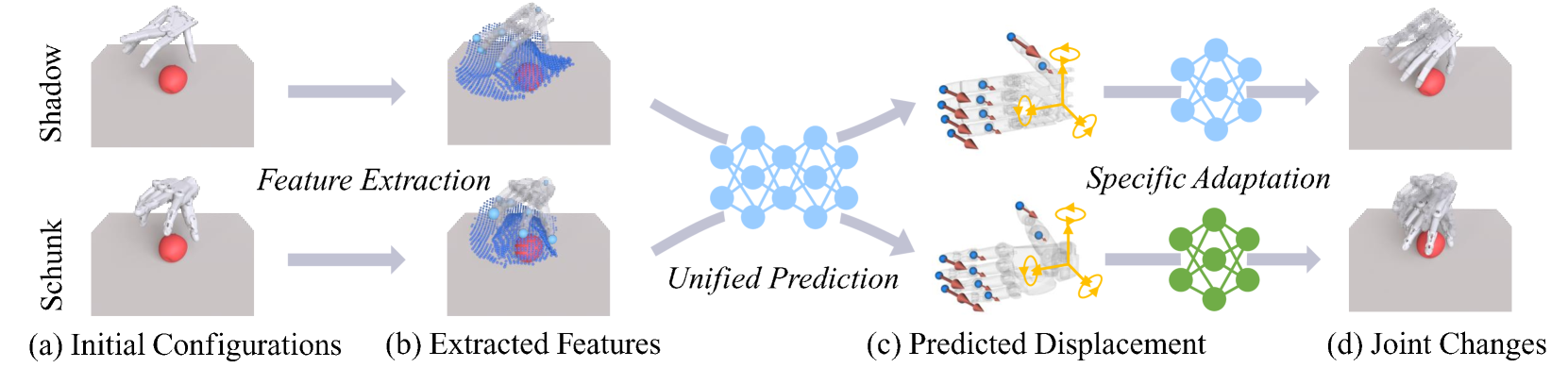
Learning Cross-hand Policies for High-DOF Reaching and Grasping
Qijin She, Shishun Zhang, Yunfan Ye, Ruizhen Hu, Kai Xu
Reaching-and-grasping is a fundamental skill for robotic manipulation, but existing methods usually train models on a specific gripper and cannot be reused on another gripper. In this paper, we propose a novel method that can learn a unified policy model that can be easily transferred to different dexterous grippers. Our method consists of two stages: a gripper-agnostic policy model that predicts the displacements of pre-defined key points on the gripper, and a gripper-specific adaptation model that translates these displacements into adjustments for controlling the grippers' joints. The gripper state and interactions with objects are captured at the finger level using robust geometric representations, integrated with a transformer-based network to address variations in gripper morphology and geometry. In the experiments, we evaluate our method on several dexterous grippers and diverse objects, and the result shows that our method significantly outperforms the baseline methods. Pioneering the transfer of grasp policies across dexterous grippers, our method effectively demonstrates its potential for learning generalizable and transferable manipulation skills for various robotic hands.
Read more7/16/2024
🤷
0
Multi-fingered Dynamic Grasping for Unknown Objects
Yannick Burkhardt, Qian Feng, Jianxiang Feng, Karan Sharma, Zhaopeng Chen, Alois Knoll
Dexterous grasping of unseen objects in dynamic environments is an essential prerequisite for the advanced manipulation of autonomous robots. Prior advances rely on several assumptions that simplify the setup, including environment stationarity, pre-defined objects, and low-dimensional end-effectors. Though easing the problem and enabling progress, it undermined the complexity of the real world. Aiming to relax these assumptions, we present a dynamic grasping framework for unknown objects in this work, which uses a five-fingered hand with visual servo control and can compensate for external disturbances. To establish such a system on real hardware, we leverage the recent advances in real-time dexterous generative grasp synthesis and introduce several techniques to secure the robustness and performance of the overall system. Our experiments on real hardware verify the ability of the proposed system to reliably grasp unknown dynamic objects in two realistic scenarios: objects on a conveyor belt and human-robot handover. Note that there has been no prior work that can achieve dynamic multi-fingered grasping for unknown objects like ours up to the time of writing this paper. We hope our pioneering work in this direction can provide inspiration to the community and pave the way for further algorithmic and engineering advances on this challenging task. A video of the experiments is available at https://youtu.be/b87zGNoKELg.
Read more4/9/2024