Differentiable Proximal Graph Matching
2405.16479
0
0

Abstract
Graph matching is a fundamental tool in computer vision and pattern recognition. In this paper, we introduce an algorithm for graph matching based on the proximal operator, referred to as differentiable proximal graph matching (DPGM). Specifically, we relax and decompose the quadratic assignment problem for the graph matching into a sequence of convex optimization problems. The whole algorithm can be considered as a differentiable map from the graph affinity matrix to the prediction of node correspondence. Therefore, the proposed method can be organically integrated into an end-to-end deep learning framework to jointly learn both the deep feature representation and the graph affinity matrix. In addition, we provide a theoretical guarantee to ensure the proposed method converges to a stable point with a reasonable number of iterations. Numerical experiments show that PGM outperforms existing graph matching algorithms on diverse datasets such as synthetic data, and CMU House. Meanwhile, PGM can fully harness the capability of deep feature extractors and achieve state-of-art performance on PASCAL VOC keypoints.
Create account to get full access
Overview
- This paper introduces a novel approach called "Differentiable Proximal Graph Matching" (DPGM) for solving graph matching problems.
- Graph matching is a fundamental problem in computer vision, machine learning, and other fields, with applications in object recognition, image alignment, and more.
- The proposed DPGM method offers several advantages over existing techniques, including differentiability, scalability, and the ability to handle non-convex objective functions.
Plain English Explanation
The paper discusses a new technique called "Differentiable Proximal Graph Matching" (DPGM) for solving a problem known as graph matching. Graph matching is all about finding the best way to align two different graphs, which can be useful in a variety of applications like object recognition, image alignment, and more.
The key idea behind DPGM is that it can handle graph matching problems in a more flexible and effective way than previous methods. Specifically, DPGM is "differentiable," which means you can use powerful optimization techniques that rely on gradients and derivatives. This makes DPGM more scalable and able to tackle more complex, non-convex objective functions.
To put it in simpler terms, imagine you have two similar, but not identical, shapes or objects that you want to align as perfectly as possible. DPGM provides a principled way to find the optimal way to "match up" the features of these two shapes, even if the problem is quite complex. This could be useful, for example, in automatically aligning medical scans or matching images of the same object taken from different viewpoints.
The paper shows that DPGM outperforms existing graph matching techniques on a variety of benchmark tasks, demonstrating its practical advantages. Overall, this research contributes a new, more powerful tool for solving an important problem in computer vision and beyond.
Technical Explanation
The authors formulate the graph matching problem as an optimization task, where the goal is to find a bijective mapping between the vertices of two input graphs that minimizes a certain objective function. This objective typically encodes both node-level similarities (e.g., visual features) and edge-level affinities (e.g., spatial relationships) between the two graphs.
The key innovation in DPGM is the use of a differentiable proximal operator, which allows the objective function to be optimized using gradient-based methods. Specifically, the authors leverage the Sinkhorn operator, a differentiable approximation of the optimal transport problem, to define a differentiable relaxation of the discrete graph matching objective.
This differentiable formulation enables the use of efficient optimization techniques, such as proximal gradient descent, to solve the graph matching problem. The authors show that DPGM can handle non-convex objective functions and is scalable to large graphs, in contrast to many existing graph matching methods.
The paper presents extensive experiments on several benchmark graph matching datasets, including both synthetic and real-world examples from computer vision and biology. The results demonstrate that DPGM outperforms state-of-the-art graph matching algorithms in terms of both accuracy and runtime performance.
Critical Analysis
The authors present a well-designed and thorough evaluation of the DPGM method, including comparisons to a diverse set of baseline techniques. The results convincingly show the advantages of the proposed approach, particularly its ability to handle non-convex objectives and scale to large graphs.
One potential limitation of the DPGM method is its reliance on the Sinkhorn operator, which introduces an additional hyperparameter (the temperature parameter) that must be tuned. The authors discuss strategies for setting this parameter, but it would be interesting to see further investigation into more robust or adaptive techniques for controlling the Sinkhorn approximation.
Additionally, while the paper focuses on the graph matching problem, the DPGM framework could potentially be extended to other structured prediction tasks, such as graph neural PDE solvers or differentiable cluster graph neural networks. Exploring such extensions could further broaden the impact of this work.
Overall, this paper makes a valuable contribution to the field of graph matching by introducing a novel, differentiable optimization approach that outperforms existing methods. The techniques developed here could find useful applications in a variety of domains, from computer vision to bioinformatics, where robust and scalable graph matching is an important challenge.
Conclusion
The "Differentiable Proximal Graph Matching" (DPGM) method presented in this paper offers a powerful new tool for solving graph matching problems. By leveraging a differentiable formulation and efficient optimization techniques, DPGM can handle complex, non-convex objectives and scale to large graphs, outperforming state-of-the-art algorithms.
The successful application of DPGM to various benchmark tasks suggests that this approach could have significant impact in fields like computer vision, where graph matching is a crucial component for tasks such as object recognition and image alignment. Additionally, the flexible nature of the DPGM framework may enable it to be adapted for other structured prediction problems, further expanding its utility.
Overall, this research contributes an important advance in the field of graph matching, providing a more effective and scalable solution to an fundamental problem with wide-ranging applications. As the need for robust and efficient graph-based methods continues to grow, innovations like DPGM will play an increasingly important role in driving progress across many areas of science and technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌿
Unlocking the Potential of Operations Research for Multi-Graph Matching
Max Kahl, Sebastian Stricker, Lisa Hutschenreiter, Florian Bernard, Bogdan Savchynskyy
0
0
We consider the incomplete multi-graph matching problem, which is a generalization of the NP-hard quadratic assignment problem for matching multiple finite sets. Multi-graph matching plays a central role in computer vision, e.g., for matching images or shapes, so that a number of dedicated optimization techniques have been proposed. While the closely related NP-hard multi-dimensional assignment problem (MDAP) has been studied for decades in the operations research community, it only considers complete matchings and has a different cost structure. We bridge this gap and transfer well-known approximation algorithms for the MDAP to incomplete multi-graph matching. To this end, we revisit respective algorithms, adapt them to incomplete multi-graph matching, and propose their extended and parallelized versions. Our experimental validation shows that our new method substantially outperforms the previous state of the art in terms of objective and runtime. Our algorithm matches, for example, 29 images with more than 500 keypoints each in less than two minutes, whereas the fastest considered competitor requires at least half an hour while producing far worse results.
6/27/2024
Non-convex Pose Graph Optimization in SLAM via Proximal Linearized Riemannian ADMM
Xin Chen, Chunfeng Cui, Deren Han, Liqun Qi
0
0
Pose graph optimization (PGO) is a well-known technique for solving the pose-based simultaneous localization and mapping (SLAM) problem. In this paper, we represent the rotation and translation by a unit quaternion and a three-dimensional vector, and propose a new PGO model based on the von Mises-Fisher distribution. The constraints derived from the unit quaternions are spherical manifolds, and the projection onto the constraints can be calculated by normalization. Then a proximal linearized Riemannian alternating direction method of multipliers (PieADMM) is developed to solve the proposed model, which not only has low memory requirements, but also can update the poses in parallel. Furthermore, we establish the iteration complexity of $O(1/epsilon^{2})$ of PieADMM for finding an $epsilon$-stationary solution of our model. The efficiency of our proposed algorithm is demonstrated by numerical experiments on two synthetic and four 3D SLAM benchmark datasets.
4/30/2024
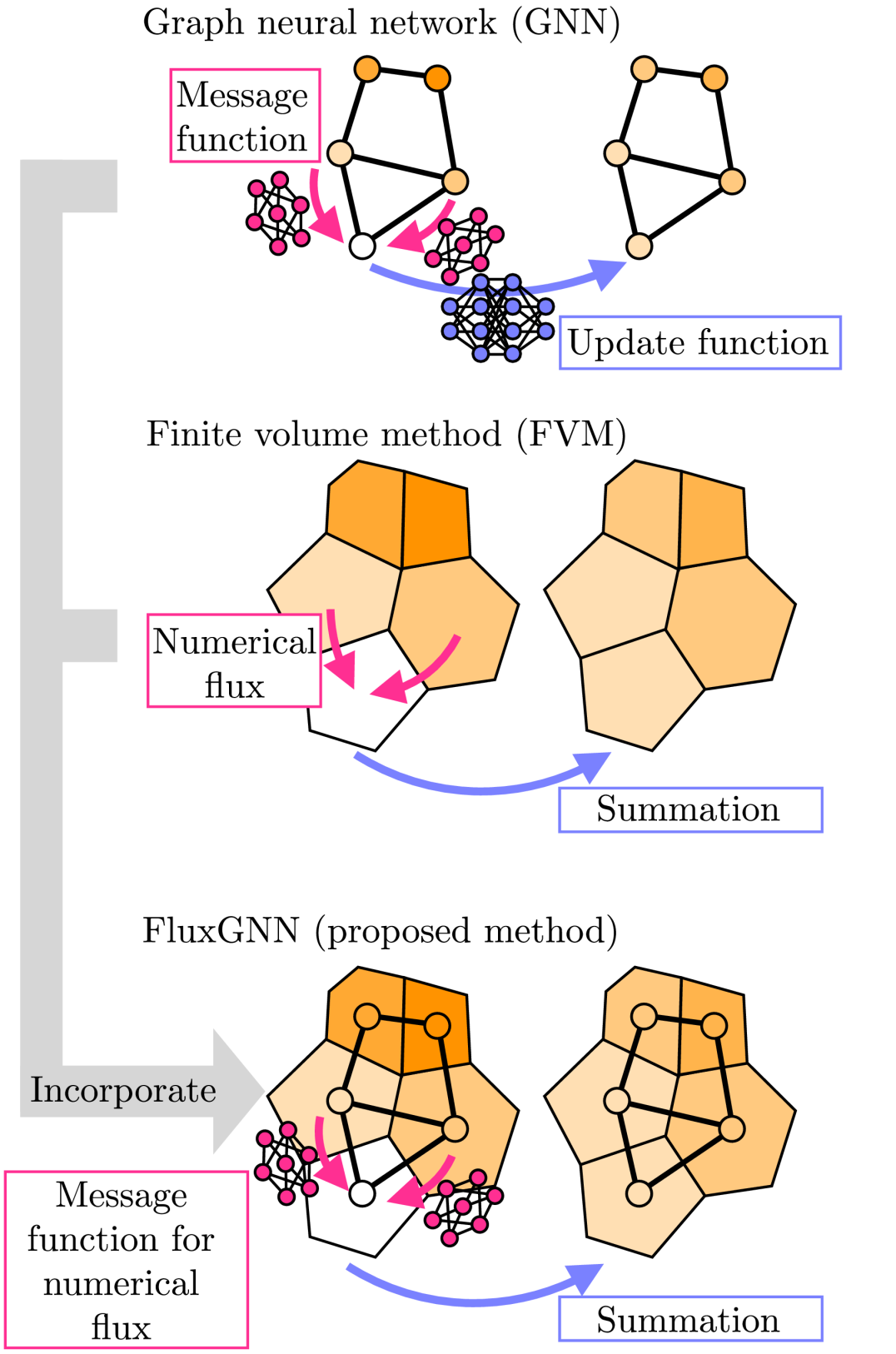
Graph Neural PDE Solvers with Conservation and Similarity-Equivariance
Masanobu Horie, Naoto Mitsume
0
0
Utilizing machine learning to address partial differential equations (PDEs) presents significant challenges due to the diversity of spatial domains and their corresponding state configurations, which complicates the task of encompassing all potential scenarios through data-driven methodologies alone. Moreover, there are legitimate concerns regarding the generalization and reliability of such approaches, as they often overlook inherent physical constraints. In response to these challenges, this study introduces a novel machine-learning architecture that is highly generalizable and adheres to conservation laws and physical symmetries, thereby ensuring greater reliability. The foundation of this architecture is graph neural networks (GNNs), which are adept at accommodating a variety of shapes and forms. Additionally, we explore the parallels between GNNs and traditional numerical solvers, facilitating a seamless integration of conservative principles and symmetries into machine learning models. Our findings from experiments demonstrate that the model's inclusion of physical laws significantly enhances its generalizability, i.e., no significant accuracy degradation for unseen spatial domains while other models degrade. The code is available at https://github.com/yellowshippo/fluxgnn-icml2024.
5/28/2024
Diff-Reg v1: Diffusion Matching Model for Registration Problem
Qianliang Wu, Haobo Jiang, Lei Luo, Jun Li, Yaqing Ding, Jin Xie, Jian Yang
0
0
Establishing reliable correspondences is essential for registration tasks such as 3D and 2D3D registration. Existing methods commonly leverage geometric or semantic point features to generate potential correspondences. However, these features may face challenges such as large deformation, scale inconsistency, and ambiguous matching problems (e.g., symmetry). Additionally, many previous methods, which rely on single-pass prediction, may struggle with local minima in complex scenarios. To mitigate these challenges, we introduce a diffusion matching model for robust correspondence construction. Our approach treats correspondence estimation as a denoising diffusion process within the doubly stochastic matrix space, which gradually denoises (refines) a doubly stochastic matching matrix to the ground-truth one for high-quality correspondence estimation. It involves a forward diffusion process that gradually introduces Gaussian noise into the ground truth matching matrix and a reverse denoising process that iteratively refines the noisy matching matrix. In particular, the feature extraction from the backbone occurs only once during the inference phase. Our lightweight denoising module utilizes the same feature at each reverse sampling step. Evaluation of our method on both 3D and 2D3D registration tasks confirms its effectiveness.
4/1/2024