Differentiable and Stable Long-Range Tracking of Multiple Posterior Modes
2404.08789
0
0
Abstract
Particle filters flexibly represent multiple posterior modes nonparametrically, via a collection of weighted samples, but have classically been applied to tracking problems with known dynamics and observation likelihoods. Such generative models may be inaccurate or unavailable for high-dimensional observations like images. We instead leverage training data to discriminatively learn particle-based representations of uncertainty in latent object states, conditioned on arbitrary observations via deep neural network encoders. While prior discriminative particle filters have used heuristic relaxations of discrete particle resampling, or biased learning by truncating gradients at resampling steps, we achieve unbiased and low-variance gradient estimates by representing posteriors as continuous mixture densities. Our theory and experiments expose dramatic failures of existing reparameterization-based estimators for mixture gradients, an issue we address via an importance-sampling gradient estimator. Unlike standard recurrent neural networks, our mixture density particle filter represents multimodal uncertainty in continuous latent states, improving accuracy and robustness. On a range of challenging tracking and robot localization problems, our approach achieves dramatic improvements in accuracy, while also showing much greater stability across multiple training runs.
Create account to get full access
Overview
- The paper presents a novel approach for long-range tracking of multiple posterior modes in sequential state estimation problems.
- It introduces a differentiable and stable method for representing and updating multimodal probability distributions over time, which is crucial for many real-world applications.
- The proposed technique leverages generative models to learn a low-dimensional latent representation of the state space, enabling efficient and flexible tracking of complex posterior distributions.
Plain English Explanation
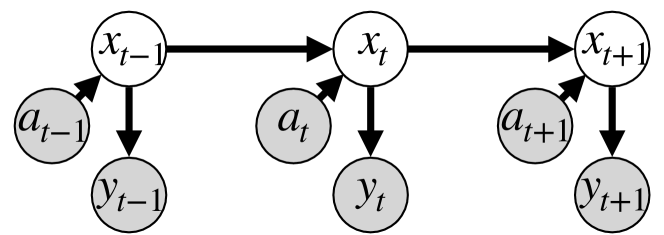
Many real-world problems, such as object tracking or robot navigation, require estimating the state of a system over time based on noisy or partial observations. This is known as sequential state estimation, and a common approach is to use particle filters. However, particle filters can struggle to maintain and track multiple modes, or peaks, in the probability distribution of the system's state.
The authors of this paper have developed a new method that addresses this limitation. Their approach uses a generative model, such as a variational autoencoder, to learn a low-dimensional representation of the state space. This allows the system to efficiently track complex, multimodal distributions over time, even when the true state distribution is challenging to represent directly.
The key innovation is that the method is both differentiable and stable, meaning it can be optimized using standard gradient-based techniques and it can reliably maintain multiple modes in the state distribution over long time horizons. This is crucial for many real-world applications where the system's state may evolve in unpredictable ways.
Technical Explanation
The paper introduces a sequential state estimation framework that leverages generative models to learn a low-dimensional latent representation of the state space. This latent representation is then used to efficiently track the evolution of the state distribution over time, even when it is multimodal.
The core of the approach is a differentiable particle filtering algorithm, which updates the latent representation of the state distribution in a stable and differentiable manner. This is achieved by parameterizing the particle filter's proposal distribution using the generative model, and then optimizing the particles' latent codes using gradient-based methods.
The authors demonstrate the effectiveness of their method on several challenging tracking tasks, including multi-object tracking and robot navigation. They show that their approach can reliably maintain and track multiple modes in the state distribution, outperforming traditional particle filters, particularly over long time horizons.
Critical Analysis
The paper presents a compelling and well-designed solution to the problem of long-range tracking of multimodal state distributions. The authors have thoroughly evaluated their method and demonstrated its advantages over existing approaches.
One potential limitation is that the method relies on the availability of a suitable generative model for the problem domain. While the authors show that their approach can work with different types of generative models, the performance may still be sensitive to the choice and quality of the model.
Additionally, the computational complexity of the method may be higher than traditional particle filters, particularly when the latent representation has a large number of dimensions. This could be a concern for real-time applications with tight computational budgets.
It would also be interesting to see how the method performs in scenarios with more severe nonlinearities or high-dimensional state spaces, as these can pose additional challenges for sequential state estimation.
Conclusion
This paper presents an innovative approach to sequential state estimation that addresses the limitations of traditional particle filters in tracking multimodal probability distributions over time. By leveraging the representational power of generative models, the authors have developed a differentiable and stable method that can reliably maintain and update multiple modes in the state distribution.
The proposed technique has the potential to significantly improve the performance of real-world applications, such as multi-object tracking and robot navigation, where accurately representing and tracking complex state distributions is crucial. The authors have demonstrated the effectiveness of their method on several challenging benchmarks, and their work represents an important contribution to the field of sequential state estimation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Resampling-free Particle Filters in High-dimensions
Akhilan Boopathy, Aneesh Muppidi, Peggy Yang, Abhiram Iyer, William Yue, Ila Fiete
0
0
State estimation is crucial for the performance and safety of numerous robotic applications. Among the suite of estimation techniques, particle filters have been identified as a powerful solution due to their non-parametric nature. Yet, in high-dimensional state spaces, these filters face challenges such as 'particle deprivation' which hinders accurate representation of the true posterior distribution. This paper introduces a novel resampling-free particle filter designed to mitigate particle deprivation by forgoing the traditional resampling step. This ensures a broader and more diverse particle set, especially vital in high-dimensional scenarios. Theoretically, our proposed filter is shown to offer a near-accurate representation of the desired posterior distribution in high-dimensional contexts. Empirically, the effectiveness of our approach is underscored through a high-dimensional synthetic state estimation task and a 6D pose estimation derived from videos. We posit that as robotic systems evolve with greater degrees of freedom, particle filters tailored for high-dimensional state spaces will be indispensable.
4/23/2024
🌿
Learning to Approximate Particle Smoothing Trajectories via Diffusion Generative Models
Ella Tamir, Arno Solin
0
0
Learning dynamical systems from sparse observations is critical in numerous fields, including biology, finance, and physics. Even if tackling such problems is standard in general information fusion, it remains challenging for contemporary machine learning models, such as diffusion models. We introduce a method that integrates conditional particle filtering with ancestral sampling and diffusion models, enabling the generation of realistic trajectories that align with observed data. Our approach uses a smoother based on iterating a conditional particle filter with ancestral sampling to first generate plausible trajectories matching observed marginals, and learns the corresponding diffusion model. This approach provides both a generative method for high-quality, smoothed trajectories under complex constraints, and an efficient approximation of the particle smoothing distribution for classical tracking problems. We demonstrate the approach in time-series generation and interpolation tasks, including vehicle tracking and single-cell RNA sequencing data.
6/4/2024

Revisiting semi-supervised training objectives for differentiable particle filters
Jiaxi Li, John-Joseph Brady, Xiongjie Chen, Yunpeng Li
0
0
Differentiable particle filters combine the flexibility of neural networks with the probabilistic nature of sequential Monte Carlo methods. However, traditional approaches rely on the availability of labelled data, i.e., the ground truth latent state information, which is often difficult to obtain in real-world applications. This paper compares the effectiveness of two semi-supervised training objectives for differentiable particle filters. We present results in two simulated environments where labelled data are scarce.
5/3/2024
💬
Regime Learning for Differentiable Particle Filters
John-Joseph Brady, Yuhui Luo, Wenwu Wang, Victor Elvira, Yunpeng Li
0
0
Differentiable particle filters are an emerging class of models that combine sequential Monte Carlo techniques with the flexibility of neural networks to perform state space inference. This paper concerns the case where the system may switch between a finite set of state-space models, i.e. regimes. No prior approaches effectively learn both the individual regimes and the switching process simultaneously. In this paper, we propose the neural network based regime learning differentiable particle filter (RLPF) to address this problem. We further design a training procedure for the RLPF and other related algorithms. We demonstrate competitive performance compared to the previous state-of-the-art algorithms on a pair of numerical experiments.
6/13/2024